

Собственный рой беспилотников - возможно ли?
21.01.2016“И тут с неба посыпались роботы…” - возможно, именно с таких слов начнется один из репортажей о роях беспилотников, которые все больше выходят за пределы применений, доступных лишь крупным корпорациям и отдельным умельцам. Действительно, если люди уже научились автоматизировать управление двигателями коптера и процесс интерпретации базовых команд с пульта, возникает вопрос - что мешает оператору управлять множеством беспилотников одновременно? В принципе, ничего. Но давайте разберемся последовательно.
Что такое рой роботов?
Под “роем” роботизированных устройств принято понимать группу из нескольких машин, действующих в рамках общей задачи. Такой рой может различаться по степени автономности своих элементов, по их специализации (встречаются гомогенные и гетерогенные группы, состоящие, соответственно, из однотипных или различных “участников”), по уровню взаимодействия роботов (в ряде случаев у “роя” есть центральный компьютер, управляющий отдельными устройствами, а иногда машины ориентируются в пространстве, учитывая исключительно свое местоположение относительно других элементов роя) и т.д.
Зачем нужны рои роботов?
Преимущества технологии очевидны - при желании, масштабы “роя” можно изменять, увеличивая или сокращая число входящих в него элементов, а в случае каких-либо проблем, потеря одного из устройств не будет столь критичной, как в случае с единственным дорогим и высокотехнологичным аппаратом. При этом “рой” может покрывать значительную территорию - например при поиске людей или мониторинге сельскохозяйственных угодий. Три базовых правила, регламентирующие поведение дронов в группе - разделение, выравнивание и сплоченность.
Множатся примеры оригинального использования групп беспилотников - например, для создания красочных световых шоу.
Есть ли минусы?
Тем не менее, нельзя не учитывать и недостатки групп роботов. Как правило, к ним относится сложность формирования надежной связи между отдельными элементами - если взаимодействия между элементами будут запаздывать, они могут не успевать реагировать на изменения в окружающей среде, возможны столкновения дронов в воздухе и другие проблемы. Погоня за дешевизной отдельных элементов приводит к тому, что теряется часть функциональностей, достижимых при наличии одного, но качественного БЛА. Впрочем, это общее правило, понятно, что характеристики роя дронов вряд ли будут тождественны характеристикам отдельных беспилотников.
Как создать простейший рой роботов?
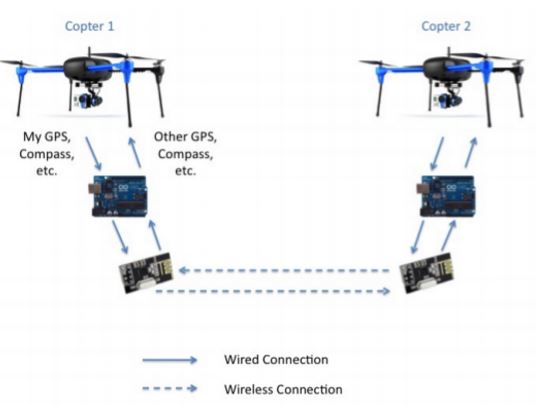
Стивен Лаццаро из Висконсинского университета в Мадисоне, США поделился базовыми рекомендациями по формированию простейшего “роя”. В своем проекте по управлению группой из пары дронов, он установил на беспилотники Iris + производства 3D Robotics контроллеры Arduino Uno и приемопередатчики. Программное обеспечение ArduCopter было модифицировано таким образом, чтобы контроллер мог снимать данные о местоположении дрона в пространстве с автопилота the Pixhawk и 4 раза в секунду передавать эти данные в эфир, чтобы участники “роя” могли корректировать свое положение в “строю” относительно “ведущего” и “соседей”.
Наиболее простая методика, используемая при управлении роем беспилотников сводится к управлению одним аппаратом. Остальные дроны при этом удерживают позицию относительно соседей. Для позиционирования можно использовать сколь угодно сложные системы, включая компьютерное зрение и лидары, однако в простейшем случае дроны обмениваются друг с другом типовыми данными, а именно:
- своими GPS-координатами;
- параметром погрешности (снижение точности в горизонтальной плоскости) в метрах, многие GPS-приемники определяют его самостоятельно;
- данными о векторе движения.
Каждый участник роя постоянно корректирует курс с учетом полученных данных. Например, если желаемое расстояние между двумя БЛА составляет 10 м, а погрешность удерживается в рамках одного метра, беспилотники не будут совершать никаких дополнительных действий. Это продлится до тех пор, пока дистанция не сократится до 8 или не увеличится до 12 метров (погрешность касается каждого аппарата и, соответственно, учитывается дважды). Функция ввода поправок в курс БЛА не должна быть линейной - чем выше отклонение от курса, тем жестче должна быть вводимая корректировка. Стивен, в частности, использовал квадратичную функцию.
Некоторые алгоритмы могут прерывать стандартные процессы корректировки - например, в случае посадки. Логика может быть разнообразной. В проекте Стивена использовалась следующая последовательность - дроны передают друг другу свои координаты и “решают”, какой из аппаратов находится ближе других к одной из точек “безопасной посадки”. После этого они садятся один за другим, причем каждый последующий ожидает сигнала от предыдущего, подтверждающего факт приземления.
Проект интересен в первую очередь тем, что единственные “вмешательства” в структуру приобретенных БЛА сводились к установке платы Arduino Uno и передатчиков на 2.4 ГГц. Для того, чтобы управлять группой дронов с одного пульта еще более эффективно, можно задуматься о формировании шаблонов воздушных построений. В таком случаи, интерпретация команд каждым дроном будет различаться в зависимости от выбранного стиля группового поведения - полета клином, линией, квадратом, кубом и т.д.
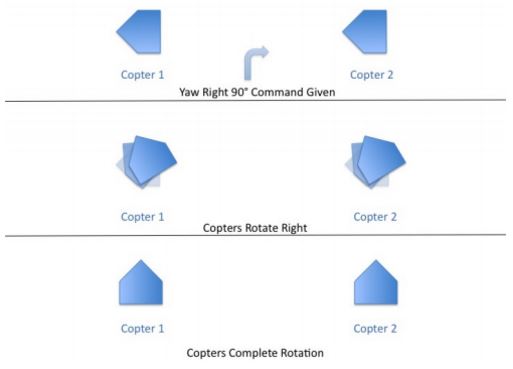
Самый примитивный способ маневрирования сводится к вращению каждого дрона вокруг оси z при сохранении дистанции между аппаратами.
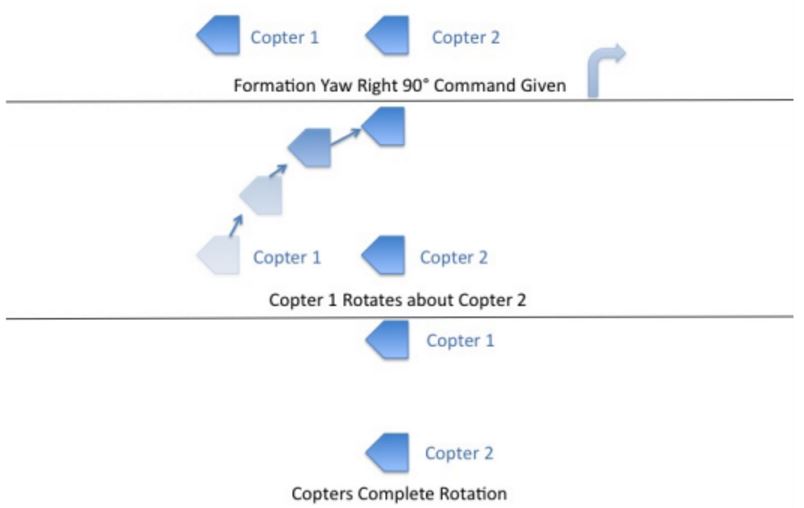
Более сложные маневры учитывают местоположение дрона в формации.
Подробнее о ходе исследований Стивена можно почитать по ссылке:
Готовое ПО для “роя”.
Тем, кто не хочет разрабатывать собственное программное обеспечение для контроля группы из нескольких беспилотников, доступен ряд готовых решений:
- Swarming/Formation-Flying Interface для ПО Mission Planner (ArduPilot). Приложение находится на стадии бета-тестирования, так что и его надежность, и простота использования оставляют желать лучшего.
- и - ПО для управления несколькими аппаратами. Mission Planner действует довольно примитивно - использует данные о позиции телеуправляемого или летящего по заданному маршруту “лидера” для выдачи набора точек маршрута “последователям”.
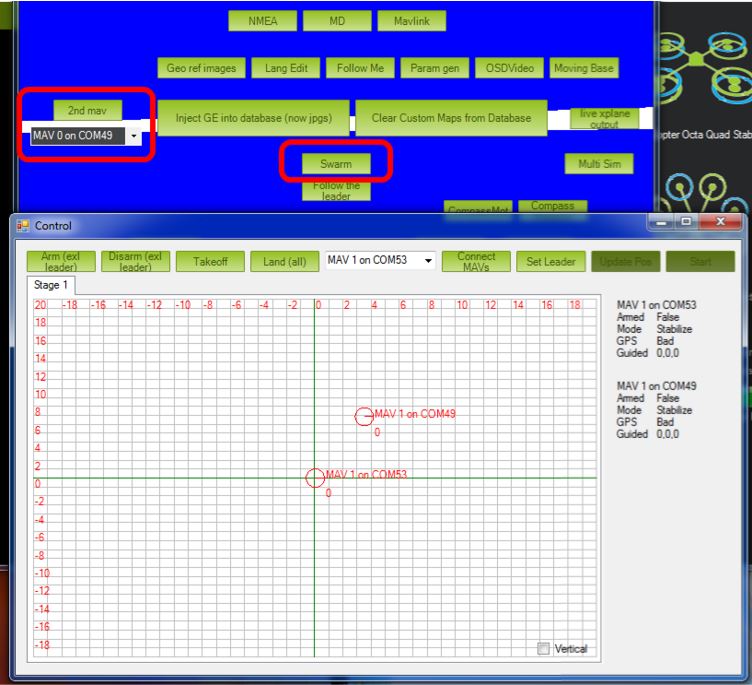
Интерфейс программы выглядит следующим образом:
Источник картинки:
Настройка группы довольно проста:
- Оснастите каждый аппарат радиопередатчиком 3DR
- Отметьте “лидера” в Mission Planner: для этого нажмите Control-F и выберите опцию “swarm” (рой), в ней - “set leader”.
- Выберите опцию “Connect MAVs” и подключите в ней ведомые аппараты
- “Растащите” кружки, обозначающие БЛА по координатной сетке, выбирая их положение в формации. Верхняя часть сетки совпадает с севером.
- По команде “Start” приложение начнет рассылать данные на автопилоты всех устройств, кроме лидера.
В настоящее время в разработке находятся два проекта, поддерживающих одновременное управление группой дронов.
К ним относится, в частности, БЛА , оснащенный, помимо традиционных для потребительских БЛА “фишек” также системой уклонения от столкновений.
Два месяца назад китайский гигант DJI представил видео концепта дрона Phantom X, который сможет координировать свои действия с другими беспилотниками, обеспечивая, например, съемку с разных углов, избегая столкновений и следуя за владельцем.
Компания PixiePath разрабатывает ПО для управление группами дронов, которое будет предоставляться как услуга для бизнеса.
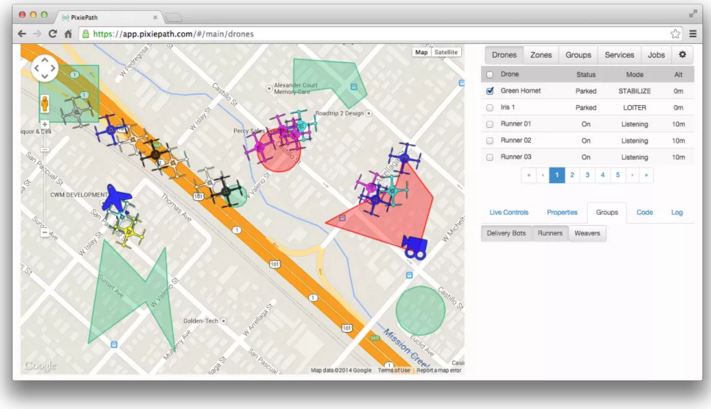
Источник картинки:
Как ожидается, технология не будет ограничена воздушными беспилотниками - те же облачные приложения могут использоваться для управления наземными и водными роботами. Помимо раздачи указаний о передвижении, программа выполнит поиск наименее энергозатратных маршрутов, отследит уровень зарядки батарей и статус выполнения задания.
Каковы перспективы роя?
Роевые технологии обладают высоким потенциалом. Многие комплектующие дронов можно печатать на 3D принтерах с минимальными затратами, а себестоимость электроники сведена к минимуму, рынок предлагает богатый выбор недорогих изделий. Потребительские беспилотники хорошо подходят для создания на их основе роев - себестоимость роя остается приемлемой для энтузиастов, тогда как возможность группового поведения может существенно разнообразить область потенциального применения роя. Кроме световых шоу можно вообразить также использование дронов в рекламе, проведении масштабных поисково-спасательных операций. Самодельный рой, возможно, найдет применение в сельском хозяйстве, например, для опыления посадок, а рой подводных дронов может выполнить 3D-сканирование дна океана. Возможно вы придумаете свои собственные, неповторимые варианты использования “роя” беспилотников.
Говоря о ближайших перспективах применений роев роботов, нельзя не вспомнить об автомобильных автопилотах. Потенциальное развитие технологии - централизованные системы управления транспортом в городе. В такой системе все автомобили - это рой. Каждый участник роя движется из точки отправления в точку назначения по выделенному конкретно для него маршруту, оптимизированному так, чтобы минимизировать среднее время движения всех транспортных средств в городе. Другой вариант организации авто-роя - каждым автомобилем управляет бортовой автопилот, при этом авто непрерывно обменивается информацией с другими участниками движения (соседями по “рою”) и городской инфраструктурой, чтобы избежать столкновений и выбрать оптимальный скоростной режим. В самые ближайшие годы мы, вероятно, увидим на дорогах автопоезда, состоящие из нескольких большегрузов. Ведущим автомобилем будет управлять человек, а остальные участники колонны поедут под управлением автопилотов в режиме “следования за лидером”. Это еще один вариант применения роевой технологии.
Нет сомнений, что рои роботов найдут себе применение и там, где требуется специализация, например, на стройках. В Японии уже внедряются технологии, когда летающие дроны используются для быстрого формирования 3D-карт стройплощадки, на которую сразу же выходят роботы-бульдозеры, роботы-экскаваторы и роботы-самосвалы. Бульдозеры и экскаваторы выравнивают площадку в соответствии с составленной картой и планом строительства, самосвалы перемещают землю также в соответствии с общим планом и все это практически без участия людей.
В чуть более отдаленной перспективе нас ожидает встреча с наноботами, не раз описанными в самых разных фантастических романах - от старой-доброй научной фантастики до современного технопанка. И это тоже - чуть больше, чем полностью, о роях роботов!









