
Ловкость антропоморфных роботов растет пугающе высокими темпами
12.10.2018На конференции IROS-2018 разработчики из Японии метод расчета движений робота при ходьбе и катании на скейте. Для того, чтобы добиться способности робота пользоваться скейтом без электропривода, пришлось научить робота двигаться в ситуациях с некопланарными контактами с анизотропным трением. Для того, чтобы обеспечить устойчивость антропоморфного робота, пришлось рассматривать множественные контакты со средой с точки зрения винтового исчисления (CWC - Contact Wrench Cone) для принятия решений о статусе контакта, а также анализировать дивергентную компоненту движения (DCM), которая гарантирует стабильность при генерации траектории центра масс (CoM) при ходьбе и катании на скейте.
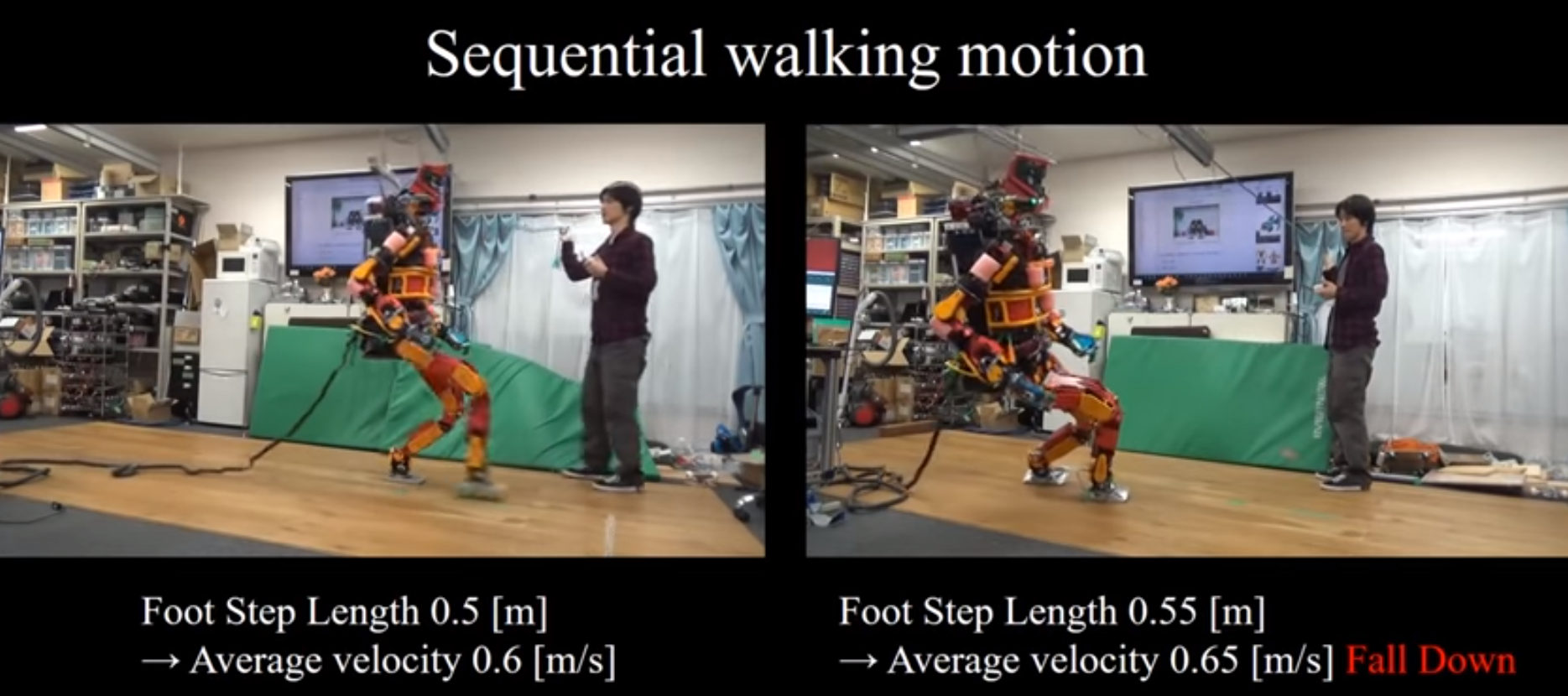
Оснащенный разработанным алгоритмом, гуманоидный робот JAXON ростом 188 см мог успешно ходить со скоростью до 0,6 м / с и кататься на скейтборде или роликовых коньках со скоростью 1,0 м / с.
Тем временем, Atlas, разработка Boston Dynamics, демонстрирует совсем уже фантастическую ловкость
++









