
Портальный робот серии PSX
Портальный робот серии PSX -- Каталог промышленных роботов
Портальный робот обеспечивающий высокоточное позиционирование технологического средства (сварочного аппарата, гидроабразивной резки, лазерного датчика) по 5 координатам в пространстве. Датчики или технологические устройства перемещается на закрепленной каретке над установленным объектом для исследования или проведения технологических операций. Объектами для исследования могут быть крупногабаритные изделия, которые требует контроля геометрических характеристик (параболические антенны, крупногабаритные сварные конструкции, емкости для реагентов и др). Для данных применения робот является высокоточной бесконтактной координатно-измерительной машиной (с установкой лазерного датчика на каретку). Для задач промышленного производства робот может выполнять операции по сварке, гидроабразивной/плазменной резки, выкладке композитных материалов, фрезеровке и др.
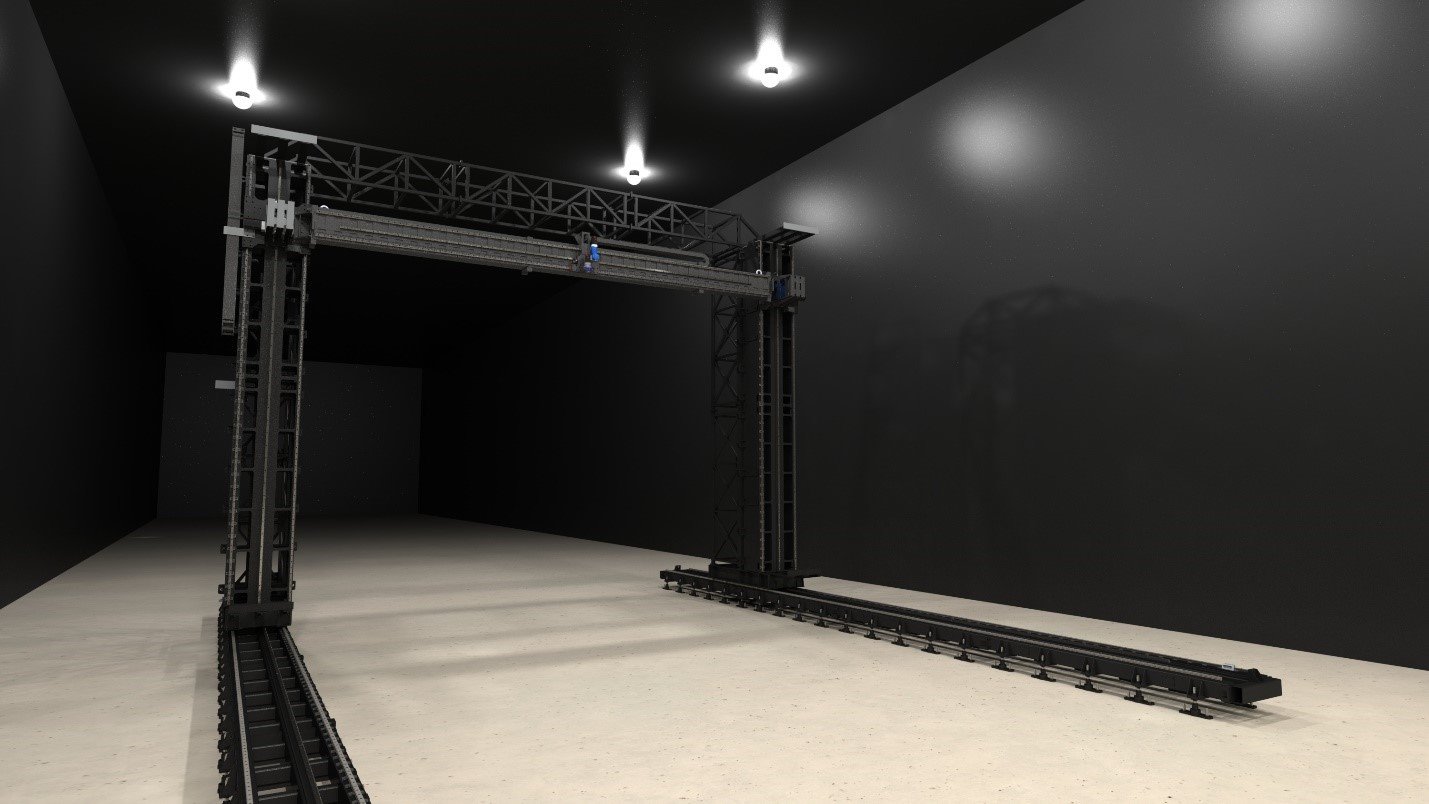
Внешний вид
Разработчик
Функциональные особенности
Продукт является уникальным на мировом рынке. Робот имеет мостовую конструкцию с двумя тандемными осями - по координате горизонтального перемещения (движение колонн), а также вертикального перемещения (движения перемычки вверх-вниз). Робот имеет функции линейной 3-осевой интерполяции движения и функции калибровки для повышения точности перемещения.
В устройстве применяется высокоточная механика собственного изготовления, лазерные датчики (опционально), высокоточная электроника, оптические энкодеры (опционально), серводвигатели, а также сложные математические и программные алгоритмы.
Конкурентные преимущества
- Полезный объем охвата области перемещения существенно увеличивается за счет вертикального перемещения перемычки без необходимости внесения дополнительной оси перемещения ползуна (вертикальной оси перемещения на базе отдельного конструктивного элемента).
- Отсутствие ползуна приводит к существенному облегчению перемычки, что повышает динамические характеристики - скорость перемещения и величину допустимых ускорений/торможений технологического приспособления (антенны/датчиков).
- Снижаются требования по высоте помещения.
- Устройство является мультизадачным и может применяться в различных производственных операциях.
- Функции интерполяции движения позволяют задавать траектории движения, отличные от линейных (наклонные, сферические итд).
- Опции оптических линеек для повышения точности перемещения относительно других индустриальных роботов (до 5мкм/м).
- Все поверхности с установленными линейными подшипниками фрезеруются с точностью 15 мкм/м.
- Конструктив портала выполнен из стали с обязательным отжигом сварных конструкций перед фрезерной обработкой. Конструкция окрашена порошковой краской.
- Робот комплектуется серводвигателями Mitsubishi. Протоколы управления роботом документированы, программный код открытый. Возможна комплектация двигателями любого производителя (ABB, Kuka, Fanuc, Mitsubishi, Yaskawa итд.).
- Модельная структура портала – возможность выбора любого размера портала с шагом 2 метра (по специальным требованиям 1 и 1,5 метра). Все элементы несущей конструкции выполняются с модульным шагом 2 метра, торцуются и базируются по прецизионным втулкам для обеспечения стыковки с погрешность не более 10 мкм.
Экономический эффект
Экономическая выгода для потребителя: Снижение требований к высоте помещения позволяет снизить затраты на строительство и оборудование помещения на 10-15%. Увеличенные скорости работы изделия позволяют повысить производительность на 15-20%. Изделие позволяет работать с объектами различной высоты и назначения, что позволяет унифицировать комплекс и для различных задач, что увеличит коэффициент использования оборудования (показатель эффективности рассчитывается индивидуально для каждого заказчика)
Экономия на стапельном возвышении, позиционере и специальной крепежной оснастки.
Статус
Карточка с описанием создана в октябре 2018 года. Источник информации - сайт компании-изготовителя.









