
Siemens создает “армию” кооперативных фабричных роботов
03.06.2016В художественном фильме “Новые времена” 1936 года, Чарли Чаплин играл рабочего на фабрике, единственная задача которого состояла в том, чтобы закручивать гайки на проходящих по конвейеру деталях - вновь и вновь, день ото дня. Сегодня то, что так пугало зрителей в прошлом, для промышленных роботов является основной задачей, оправдывающей их создание - однако господство в области повторяющихся операций - не финал эволюции созидательных машин, а лишь её первые шаги.
Производственные процессы усложняются чуть ли не ежегодно, расширяется число областей промышленности, их вариативность. Издержки, связанные с переналадкой оборудования, отступившие с появлением станков с ЧПУ и промышленных роботов, вновь дают о себе знать - например, когда компании необходимо переключиться на выпуск нового продукта.
У промышленных роботов появилась альтернатива! В Siemens к решению проблемы производства промышленных изделий подошли оригинально - компания разрабатывает “рой” из сравнительно небольших многофункциональных роботов, которые распараллеливают процесс производства, и могут эффективно перераспределять между собой получаемые задачи. Сообщения об этом появились в апреле 2016 года, сегодня мы можем рассказать об этом подробнее.
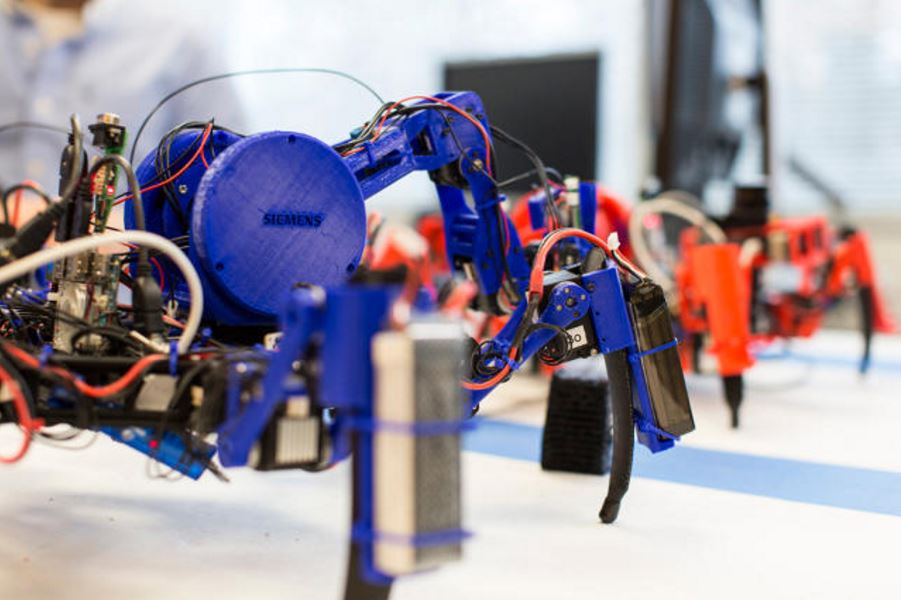
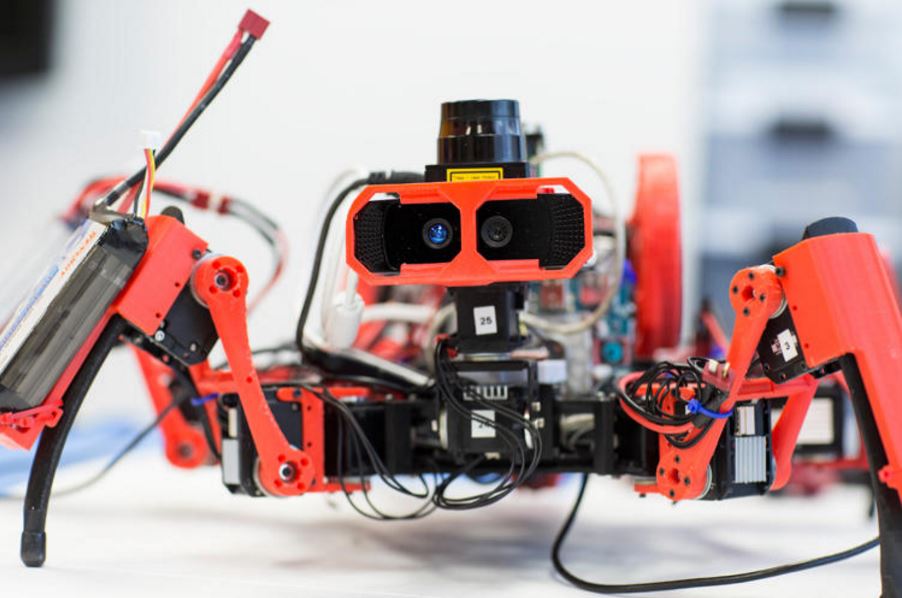
В Принстоне, США, в лаборатории Siemens разработали паукообразные мобильные 3D-принтеры, способные действовать в составе единой команды. “Головы” устройств оснащены 3D камерами, формирующими “глубину” изображения, машины также оборудованы инфракрасными и лазерными сканерами, пространственной ориентации способствуют гироскопы и акселерометры, а актуаторы в “ногах” позволяют регулировать прикладываемые усилия. Взаимодействуют устройства с использованием, как Wi-Fi, так и Bluetooth каналов. Задачи распределяются между отдельными устройствами. Передвижение роботов осуществляется с использованием метода визуального ориентирования PTAM (parallel tracking and mapping) - в помещении необходимо нанести специальные маркеры для того, чтобы машины могли ориентироваться.
Система, получившая название SISPIs (Siemens Spiders) на основе 3D-изображения будущего изделия распределяет задачи между роботами, которые немедленно приступают к параллельному выполнению работы. В случае, если один из роботов выйдет из строя или уйдет на подзарядку, другие устройства незамедлительно “сомкнут ряды”, перераспределив задания.
SISPIs - наглядное доказательство возможности создания гибкой автономной команды роботов-сборщиков. Пока что эксперименты идут с небольшими роботами, каждый из них по размеру не больше микроволновки, но устройства поддаются масштабированию - по мере готовности ПО и других технологий, команду из уже больших по-размеру роботов сможет заняться печатью крупноформатных металлических конструкций или сварочными работами.
Не исключено, что в схожие роботы будут использоваться для строительства объектов в космосе и на других небесных телах - потенциал технологии трудно переоценить! Когда они появятся, и какими они будут - это вопрос к разработчикам!









