

Презентации: Нейроморфные чипы в Робототехнике 4.0
28.04.2017Презентация В.М.Канглера, технического директора "Мотив Нейроморфные Технологии" на III Международной практической конференции по робототехнике РобоСектор-2017.
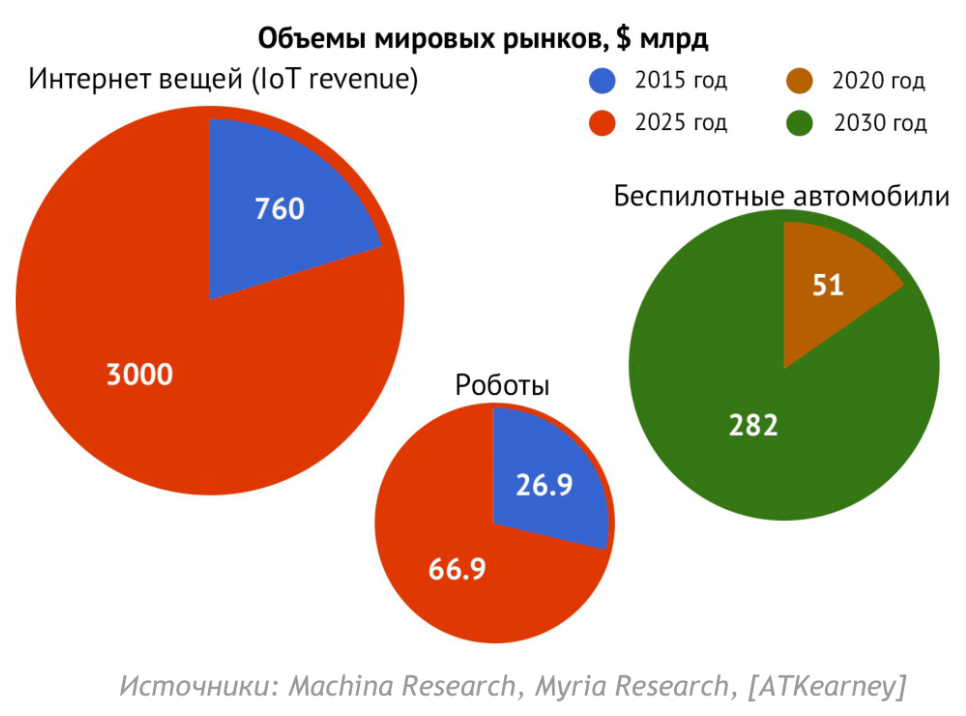
Актуальность
Новая эра:
- интеллектуальных систем
- интернета вещей
- роботов
- беспилотного транспорта
нуждается в новых вычислительных средствах, способных в реальном режиме времени: видеть, слышать, интерпретировать
Нейронные сети, обученные алгоритмами глубокого обучения, начиная с 2012 года, демонстрируют лучшие результаты в решении задач машинного зрения, обработке аудио, речи и текстов на естественных языках.
Мировые игроки

NVidia DGX-1; Drive PX2; Quqlcomm Zeroth; Google Tensor Processing Unit; IBM True North; Microsoft Catapult Platform; Intel Nervana + Movidius.
Аппаратное ускорение НС: подходы
1. Моделирование нейронных сетей на GPU/mGPU
Плюсы: Богатый программный инструментарий, простота использования GPU
минусы: высокое энергопотребление, ограниченные возможности по масштабированию, высокая стоимость оборудования, сложность применения в компактных и автономных устройствах
2. Специализированные ускорители сверточных нейронных сетей
Такие ускорители создаются либо как ASIC-решения, либо как FPGA-решения, и их архитектура специально проектируется только для моделирования сверточных нейронных сетей
Плюсы: высокая энергоэффективность, малые массогабаритные параметры
Минусы: ограниченные возможности по масштабированию, возможность моделировать только сверточные сети
3. Нейроморфные процессоры
Нейроморфными называются технологии, направленные на создание аппаратных/физических моделей нервной и сенсорной систем, аналогичных биологическим.
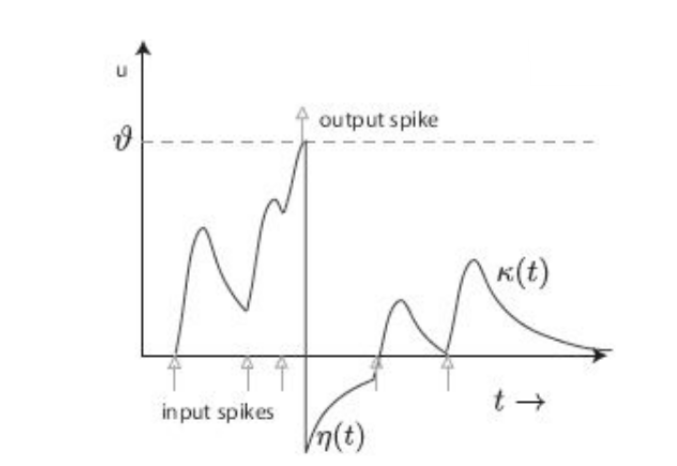
Нейроморфными процессорами называются устройства, аппаратно моделирующие работу импульсных нейронных сетей (SNN). В таких сетях моделируемые нейроны, как и реальные биологические нейроны, общаются друг с другом, используя электрические импульсы - спайки.
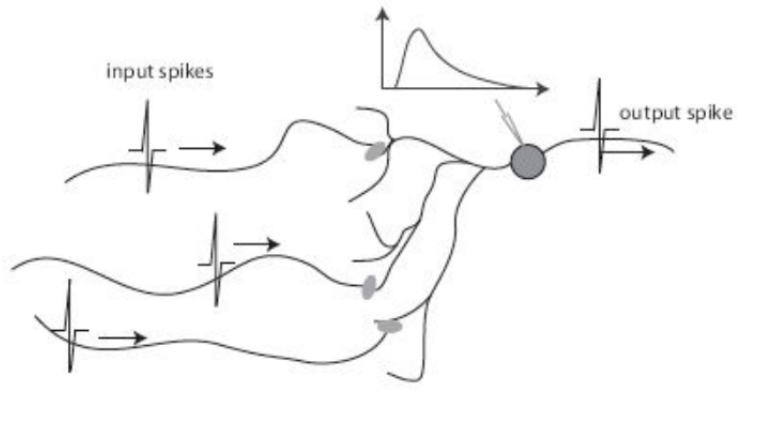
В работах Мааса [Maas et al., 2004] продемонстрировано, что SNN могут решать все задачи, решаемые НС предыдущих поколений. При этом SNN обладают большей "вычислительной мошностью", чем сети предыдущих поколений.
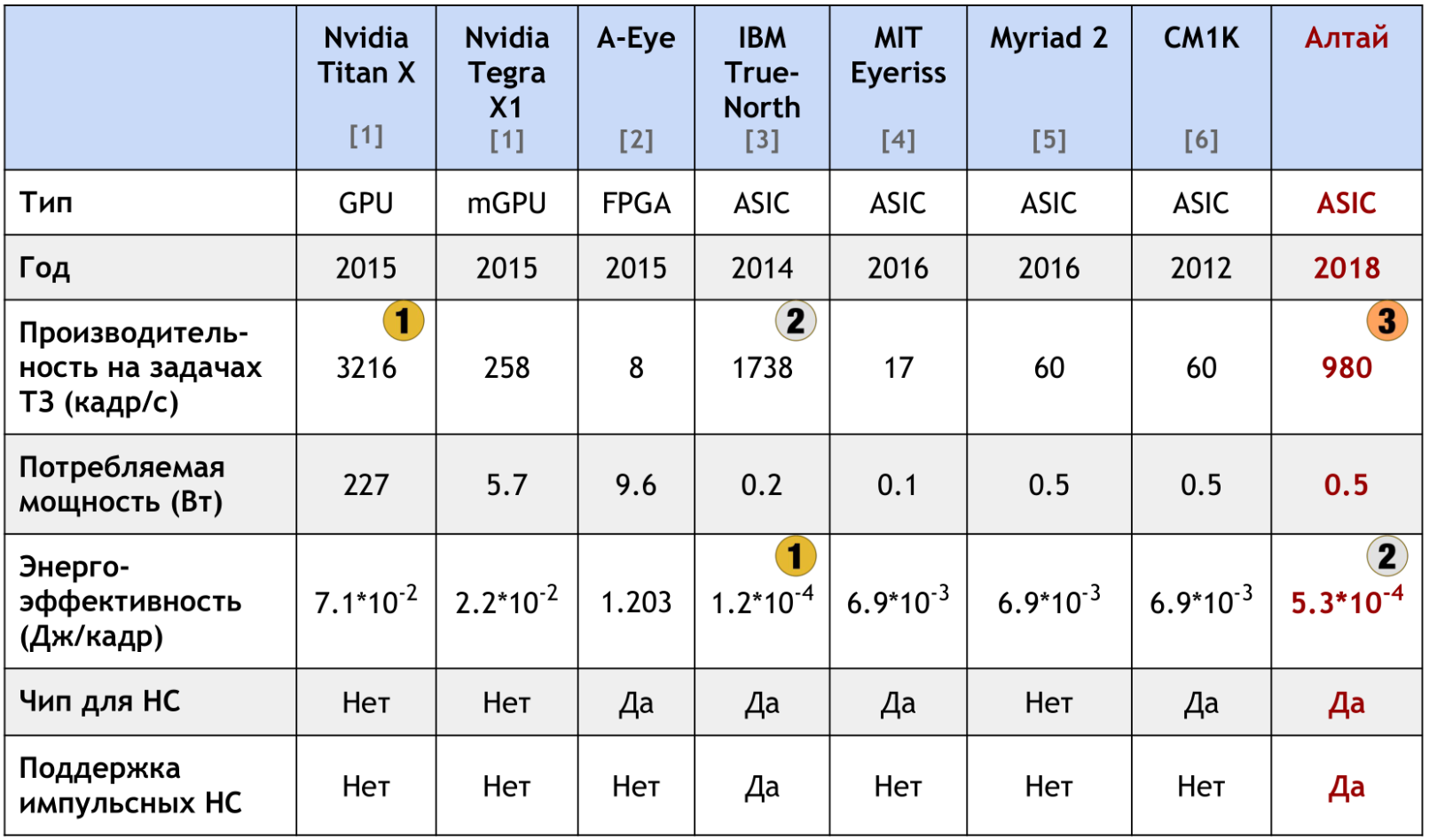
Аппаратная реализация НС: сравнение
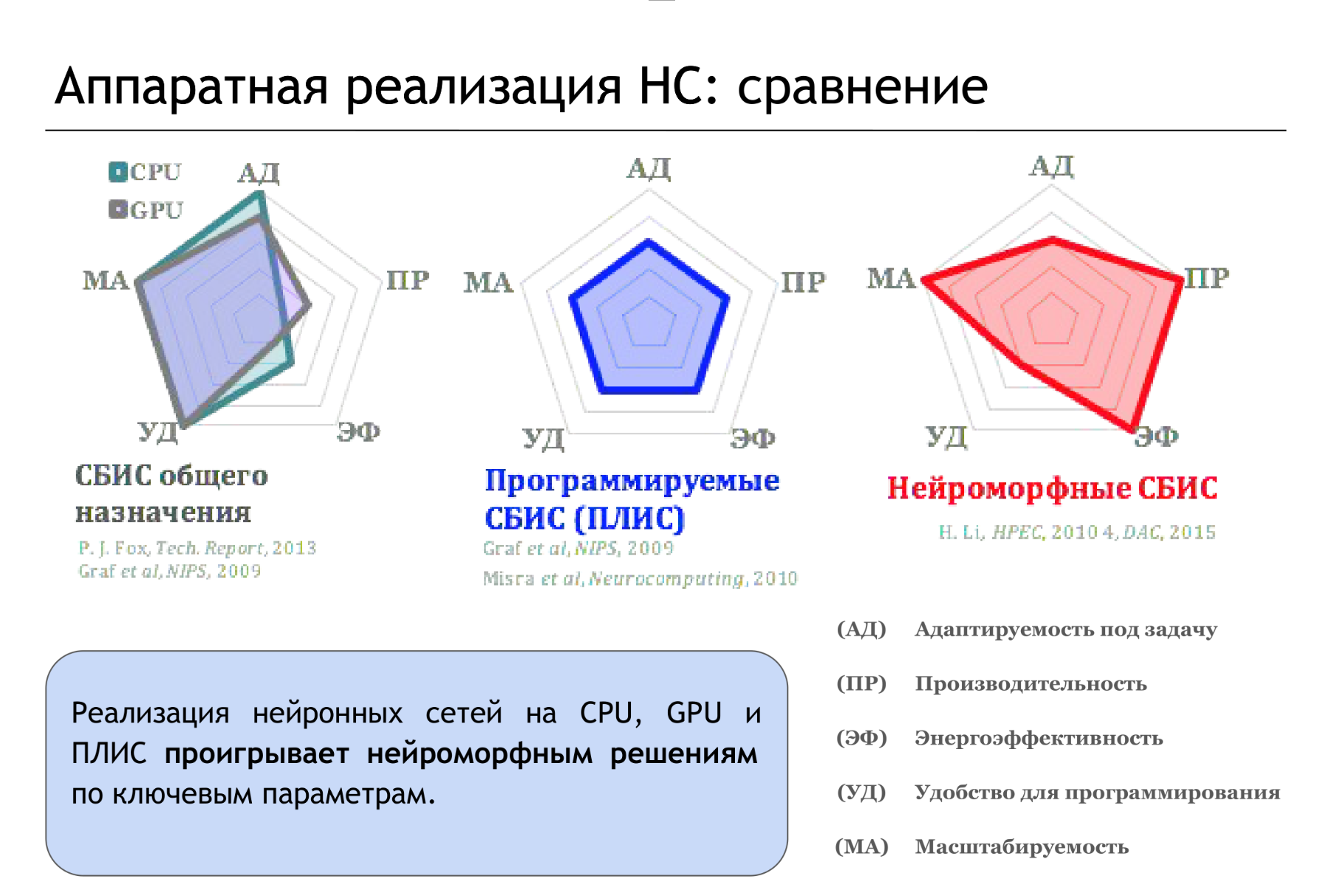
Реализация нейронных сетей на CPU, GPU и ПЛИС проигрывает нейроморфным решениям по ключевым параметрам.
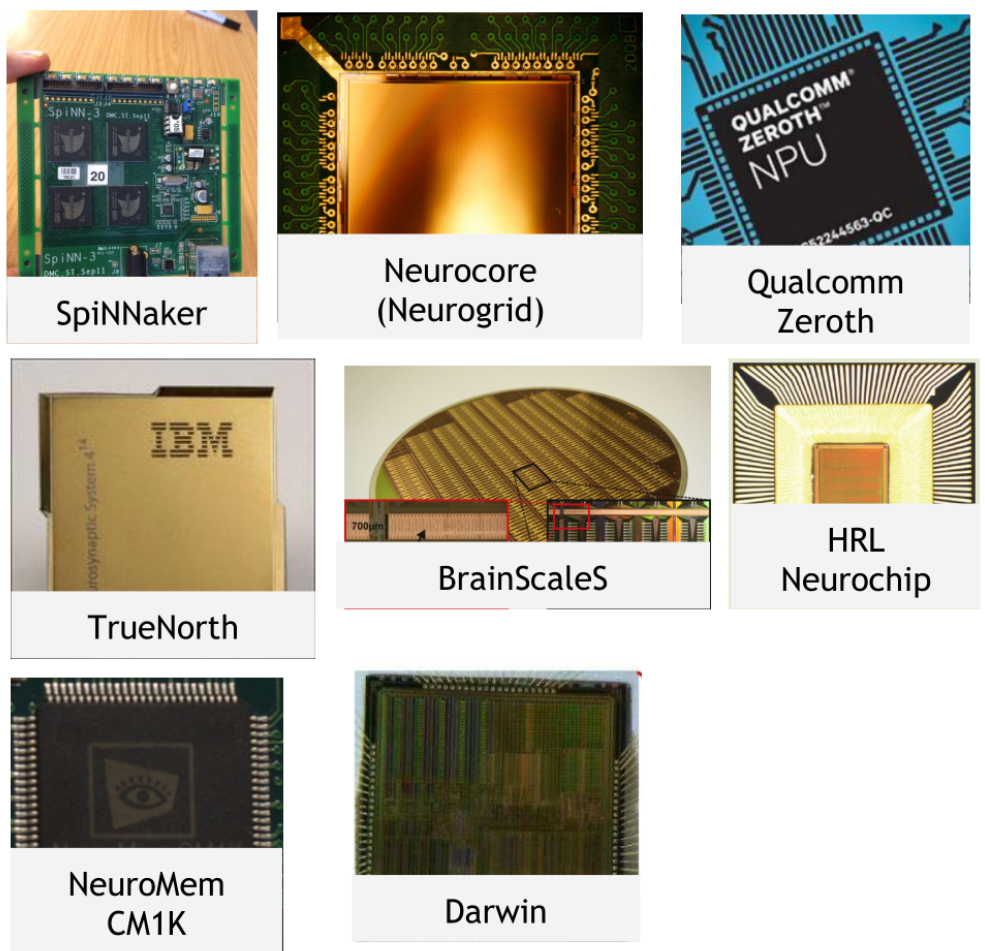
Проекты нейроморфных процессоров
- SpiNNaker
- Neurogrid
- IBM TrueNorth
- BrainScaleS
- HRL Neurochip
- Qualcomm Zeroth
- NeuroMem CM1K
- Neuromorphic Coprocessor Darwin
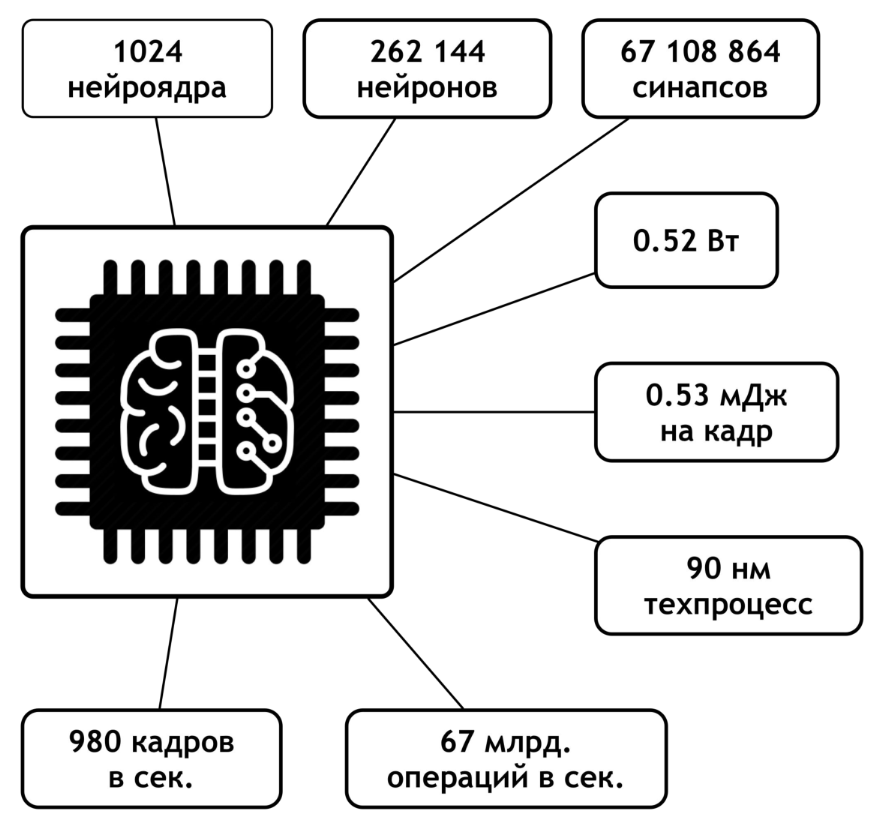
Нейроморфный чип "Алтай"
Энергоэффективный нейропроцессор для интеллектуальных устройств
"Алтай" - "вычислительное" устройство, функционирующее на принципах, схожих с биологическими нейронными системами.
Ключевые преимущества:
1. Высокая эффективность по энергопотреблению, производительности и размерам.
2. Возможность решения неформализуемых и плохо формализуемых задач.
3. Высокая масштабируемость, ограниченная только требованиями по энергопотреблению и массогабаритным параметрам.
4. Отказоустойчивая архитектура.
5. Отечественный.
Основные модели применения:
1. Обработка большого потока разнородных сигналов с целью обнаружения аномалий в системах киберфизической безопасности и системах мониторинга физических объектов
2. Обработка изображений, видео и аудио.
3. Интегрирование и обработка сенсорной информации от различных датчиков и сенсоров в робототехнике.
4. Обработка физиологических сигналов.
Низкое энергопотребление, малый размер и высокая производительность позволяют применять нейрочип "Алтай" в очень широком спектре интеллектуальных устройств
Умные устройства автоматизируют процессы, которые пока не удавалось автоматизировать.
Алтай: ключевые архитектурные решения
1. Полная цифровая реализация на современной монолитной кремниевой технологии
2. Универсальная, но простая в реализации на кристалле, цифровая модель нейрона
3. Параметры функционирования нейронов и структура сети формируются вне кристалла
4. Многоядерная архитектура. Нейрочип представляет собой масштабируемую сеть нейроядер
5. Нейрочип проектируется по модели GALS [Wang, 2008]. Ядра являются синхронными схемами, каждое из которых функционирует в своем домене синхронизации. Все коммуникативные блоки нейрочипа являются асинхронными.
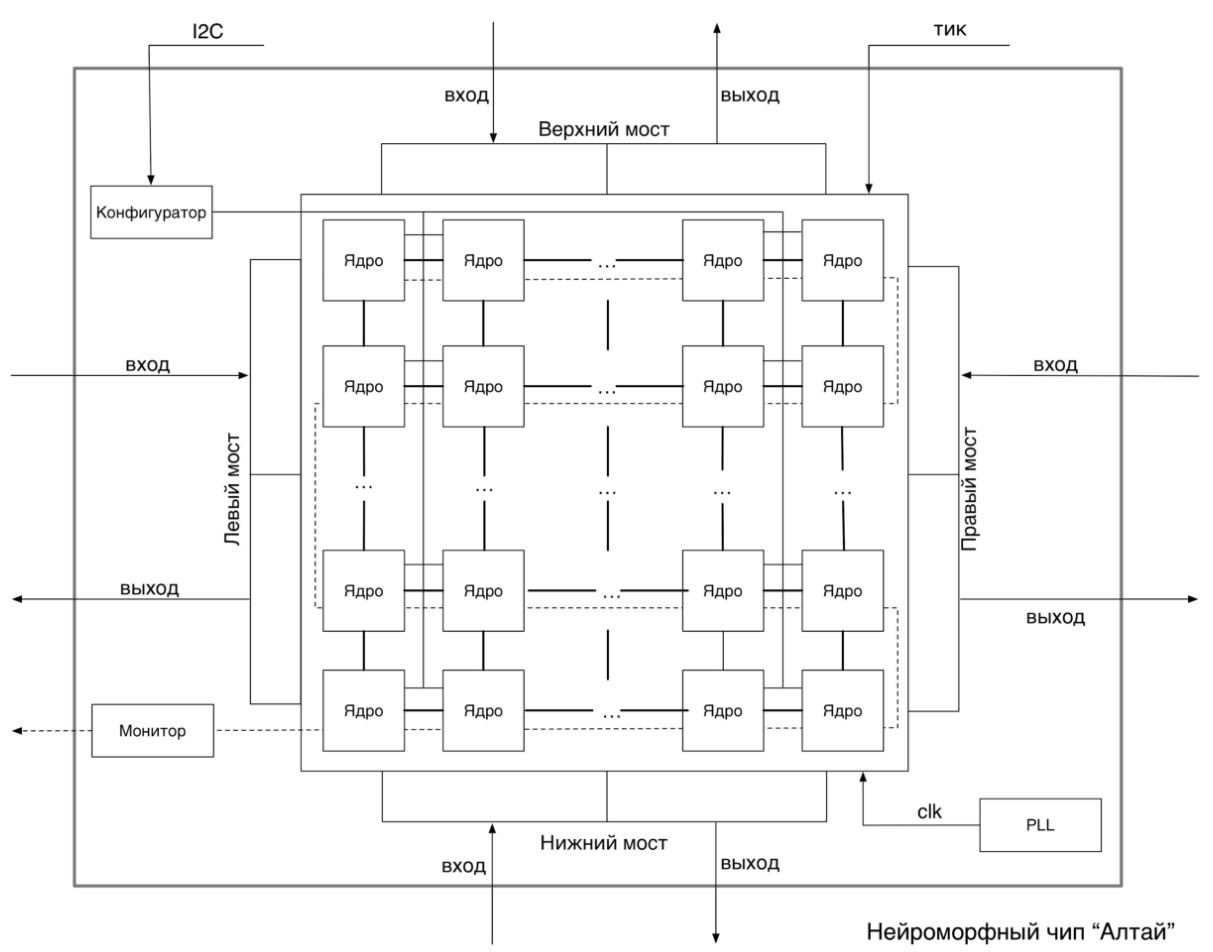
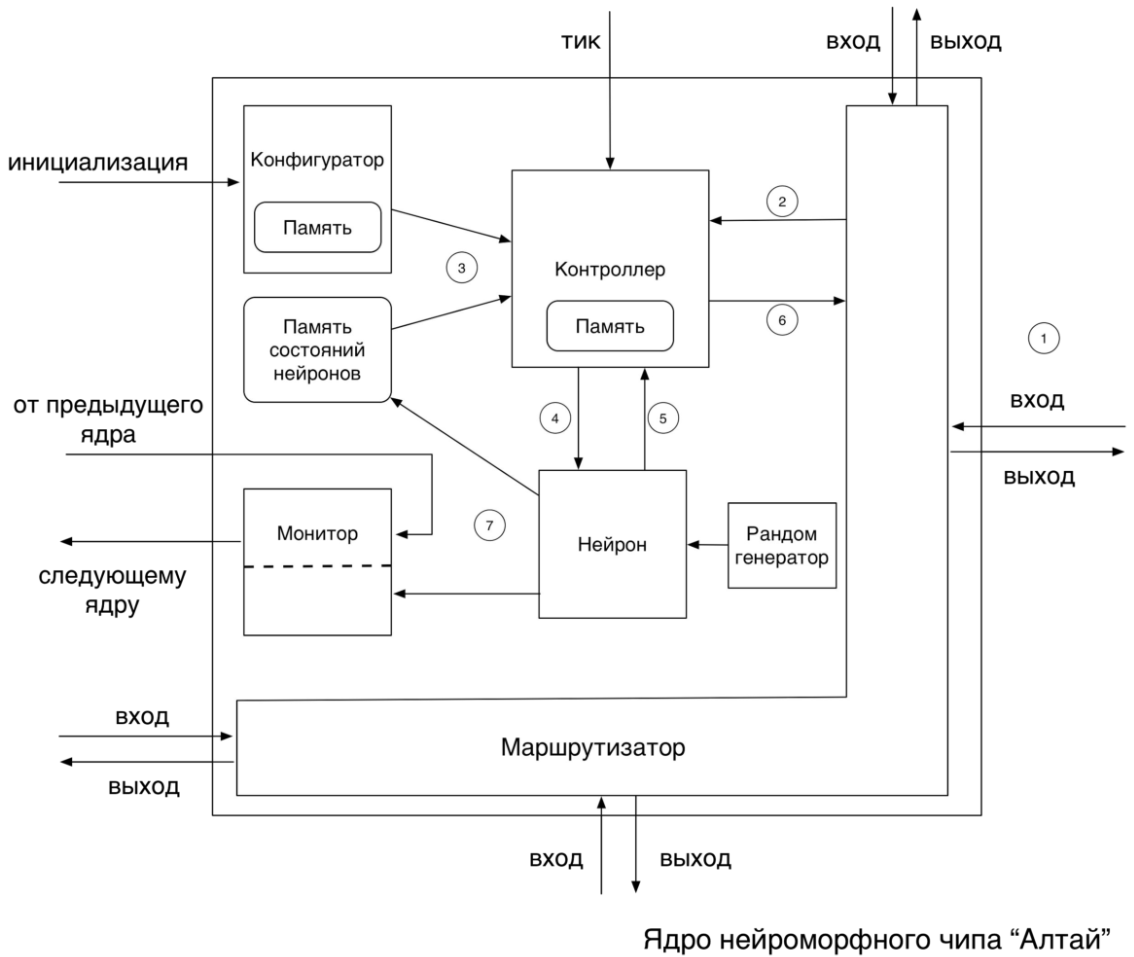
Алтай: структурная схема нейропроцессора
Алтай: структурная схема нейроядра
Сравнение с конкурентами
Применение нейрочипа "Алтай" в робототехнике
В системах технического зрения
- Для анализа видеопотока (в разных спектральных диапазонах): поиск, выделение и идентификация объектов.
- Построение 3D изображения окружающего пространства
В системе навигации
- Как спецвычислитель в мультисенсорной навигационной системе.
В системе управления
- Для выполнения нейросетевых "алгоритмов" упрвления РТС.
- Для обработки физиологических сигналов в ЧМИ.
- Для обработки в реальном времени гетерогенной информации от бортовых датчиков, агрегатов и узлов.
- Для детектирования отказов оборудования на основе анализа потоков данных по бортовым каналам информационного обмена.
Бинокулярные 3D сенсоры
Объединяя DVS (Dynamic Vision Sensor) подход с ИК сенсором и обработкой на нейроморфном процессоре, можно получить пассивный 3D сенсор с высоким динамическим диапазоном, который может строить панорамное 3D изображение в реальном времени.
- Может рассматриваться как альтернатива для связки лидар + камера
- Может использоваться в беспилотном транспорте и робототехнике.
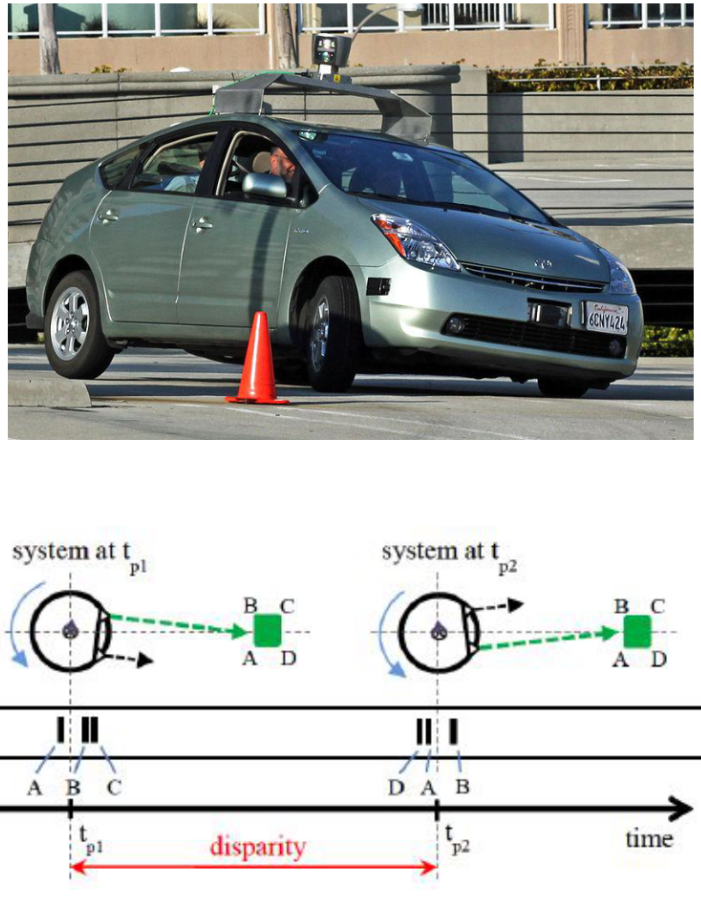
[S. Schraml et al., 2015], [M. Osswald et al., 2017]
"Алтай" - текущие результаты
- Собран ключевой состав проектной системы
- Выполнено проектирование нейроморфного чипа на уровне RTL. Проведена верификация RTL-модели нейрочипа.
- Выполнены расчеты параметров нейрочипа и проведено сравнение с лучшими мировыми аналогами. Результаты сравнения говорят о высокой конкурентоспособности нейрочипа "Алтай".
- Получено одобрение на получение статуса резидента Сколково.
- Идея проекта одобрена проектным офисом НТИ.
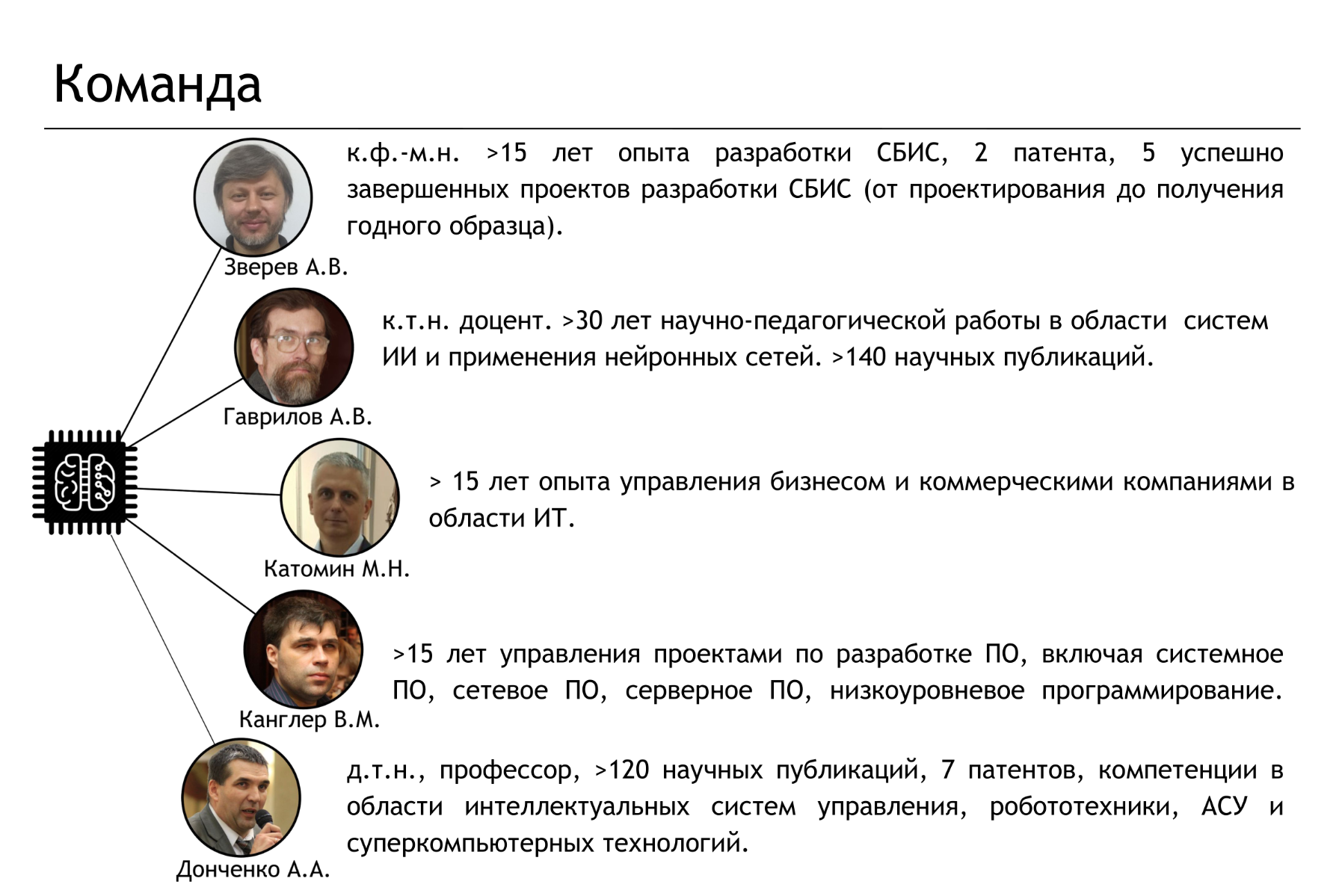
Команда
А.В.Зверев; А.В.Гаврилов; М.Н.Катомин; В.М.Канглер; А.А.Донченко
Контакты:
Список источников
[1] "GPU-Based Deep Learning Interface: A Performance and Power Analysis" // Nvidia Whitepaper, Nov. 2015
[2] S. Han et. al, "EIE: Efficient Inference Engine on Compressed Deep Neural Network // ISCA 2016
[3] Steven K. Esser, Paul A. Merolla, John V. Arthur, Andrew S. Cassidy, Rathinakumar Appuswamy, Alexander Andreopoulos, David J. Berg, Jeffrey L. McKinstry, Timothy Melano, Davis R. Barch, Carmelo di Nolfo, Pallab Datta, Arnon Amir, Brian Taba, Myron D. Flickner, Dharmendra S. Modha
""
[4] Yu-Hsin Chen, Tushar Krishna, Joel S. Emer, Vivienne Sze,
Eyeriss: An Energy-Efficient Reconfigurable Accelerator for Deep Convolutional Neural Networks
[5] Peter Clarke "Movidius Moves Myriad Vision Processor to 28nm"
[6] CM1K, the merger of 2 concepts
+
Другие материалы III Международной практической конференции по робототехнике РобоСектор-2017
+ +









