
Как это делается: универсальный мягкий захват для робоманипулятора
15.01.2019Мягкие захваты - одно из важнейших направлений развития современной профессиональной робототехники. Почему это так?

Источник изображения:
Мягкие захваты - одно из важнейших направлений развития современной профессиональной робототехники. Ключевой тренд в данной области - уход от сложного программирования и использования массы сенсоров, регулирующих движение и нажим каждого отдельного “пальца” “роборуки” и переход к простым альтернативам.
Почему это важно? Наличие мягких захватов позволит машинам работать с деликатными грузами, что приобретает особую актуальность в процессе сбора урожая или обработки пищевых товаров на складе. Концепт строится вокруг простого принципа: чем сильнее мы сжимаем некоторые сыпучие материалы (например, молотый кофе), тем прочнее и жестче сцепляются их элементы.
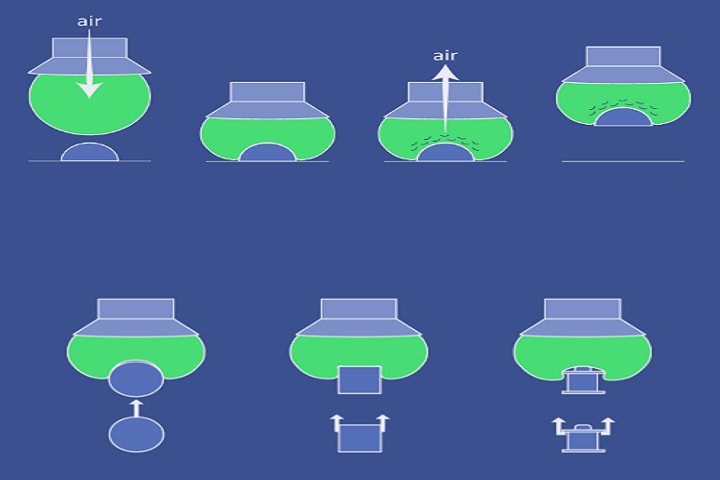
Устроен базовый захват просто: внешняя система регулирует давление воздуха в воздушном шаре, наполненным молотым кофе. В “расслабленном” состоянии объем шарика увеличивается, а кофе становится мягким и податливым, позволяя “манипулятору” легко облегать и “хватать” предметы. Прикасаясь к объектам, устройство “утапливает” их в себе, облегает, а затем откачивает из шарика лишний воздух и “твердеет”.
Пользователь Jason Poel Smith разместил на сайте набор инструкций по созданию механической составляющей манипулятора (ни о насосе, ни о готовом роботе в инструкции не говорится).
Изображение:
Казалось бы - что может быть проще заполненного молотым кофе воздушного шарика? Технология, разработанная в 2010 году специалистами из Корнуэльского и Чикагского университетов, легла в основу коммерческого захвата Versaball.
Вот только попытки коммерциализации устройства не увенчались успехом.
Технология отражает философский подход к развитию модулей для роботов, отвечающих базовым представлениям о децентрализации. Делая шаг, мы не задумываемся о том, под каким углом следует поставить ногу или с какой силой стоит напрягать те или иные мышцы. Часть процессов протекают в “автономном” режиме, тогда как другая часть попросту вытекает из свойств “материалов”. Так, например, мягкая стопа облегает камни и неровности рельефа. Почему робот должен затрачивать ресурсы процессора на то, чего можно достичь гораздо более простыми и экономичными методами? Жаль, что хорошая идея пока что так и не стала востребованной.
За новостями робототехники, ИИ, а также за трендами удобно следить в









