В MIT кобота учат работать с гибкими кабелями
14.07.2020Даже люди не всегда без проблем справляются с манипуляциями с гибкими объектами, такими как веревки, провода и кабели. Но то, что сложно для человека, для современных роботов зачастую и вовсе нерешаемая проблема. По мере того, как кабель скользит между пальцами робота, форма поверхности его соприкосновения с захватом постоянно меняется. И чтобы контролировать этот процесс, робот должен иметь возможность постоянно ощущать кабель и подстраивать его положение и движение в пространстве.
Как правило, для этого использовали серию медленных последовательных деформаций, вместе с механической фиксацией. Исследователи из известной лаборатории CSAIL (Computer Science and Artificial Intelligence Laboratory) MIT совместно с Отделением механического инжениринга решили подойти к решению этой задачи, по-иному, обучив робота способу, который больше похож на то, как решаем эту задачу мы, люди.
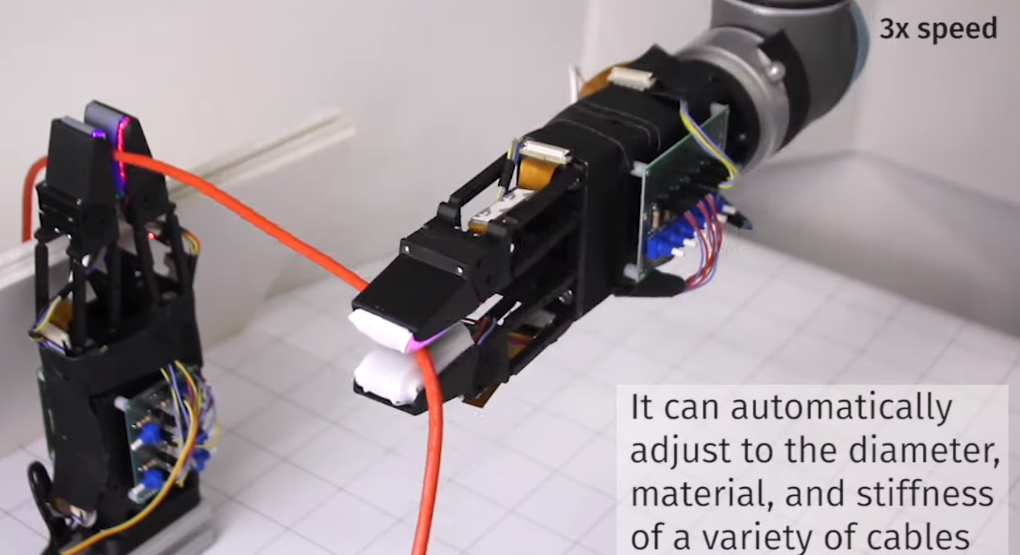
В своем решении исследователи задействовали не один, а два мягких двухпальцевых захвата с тактильными сенсорами высокого разрешения, что позволило роботу успешно манипулировать свободно движущимися кабелями.
Нетрудно вообразить, что если не сегодня, так завтра роботы смогут помогать нам не только с подключением наушников к iPad, но также с завязыванием узлов, обрезкой проводов и с зашиванием тканей после хирургических операций (кстати, такого робота разрабатывают уже несколько лет).
Команда начала с проектирования двухпальцевых захватов. Пальцы в них очень легкие и могут двигаться быстро, что позволяет добиваться "тонких" усилий с разным моментом силы и вектором ее приложения. На кончиках пальцев размещены сенсоры GelSight со встроенными камерами, выполненные из мягкой резины со встроенными камерами. Данные с камер поступают в систему компьютерного зрения робота. Один подвижный захват крепится к манипулятору кобота, который управляется общей системой управления, другой установлен в фиксированное положение на столе.
Далее команда занялась созданием системы "восприятия и управления", которая бы позволила освоить манипуляции с кабелями. Для восприятия ситуации были задействованы сенсоры GelSight, которые следят за положением кабеля между пальцами, а также замеряют силу сцепления при скольжении кабеля относительно пальцев. Одновременно работают два контроллера - один управляет силой смыкания пальцев, другой отвечает за положением захвата с тем, чтобы удерживать кабель между пальцами.
За счет установки на манипулятор, захват может надежно следовать вдоль кабеля USB, начиная со случайного положения относительно захвата. Затем, работая совместно с фиксированным захватом, робот может перемещать кабель "из руки в руку", как это делал бы человек, чтобы отыскать конец кабеля. Робот способен адаптироваться к кабелям из разных материалов и различной толщины.
На видео можно наблюдать, как робот подключает наушники к сотовому телефону. Начав со свободно висящего кабеля наушников, робот смог провести кабель между пальцев, остановился, когда почувствовал, что пальцы коснулись штеккера, отрегулировал позицию штеккера и, наконец, вставил его в гнездо разъема на корпусе телефона.
Взаимодействие с кабелем это сложная задача, минимум, по двум причинам. Во-первых, требуется управлять силой захвата, чтобы обеспечить плавное скольжение кабеля, а также "позицией захвата", чтобы предотвратить его выпадение из пальцев захвата.
Получить необходимую для этого информацию непросто, исследователи MIT воспользовались комбинацией оптических и тактильных датчиков. Суставы захвата также гибкие, чтобы исключить их повреждение или повреждение ими объектов, с которыми они взаимодействуют.
Алгоритмы достаточно сложны и адаптивны, чтобы робот мог работать с материалами с различными показателями жесткости, диаметрами и т.п.
Было замечено, что качество работы робота в заметной степени определяется выбором контроллера.
Были отмечены проблемы, например, выпуклая поверхность датчика GelSight создала дополнительные сложности, так что в ближайшее время планируется улучшить форму датчика.
Планируется продолжать работу над роботом с тем, чтобы еще более развить его способности по части манипулирования кабелями, в частности, научить его прокладывать кабель в ситуации, когда есть препятствия.
Работу исследователей поддержали Amazon Research Awards, Исследовательский институт Toyota и Управление военно-морских исследований США.
Источник: ; для тех кому важны детали:
--
- интересное о роботах и роботизации