Мини-USV. BlueBoat - платформа для самодельщиков и не только
26.11.2025На рынке USV не хватает доступных платформ, которые можно было бы использовать исследователям и студентам, энтузиастам небольшим коммерческим предприятиям. Попытку выйти на этот рынок сделала компания BlueRobotics из Калифорнии, США.
Базовая стоимость аппарата - $4400, недешево, но и недорого для USV. За эти деньги предлагается аппарат с системой навигации, GPS, прошивкой ArduRover, позволяющей роботу двигаться по заданному маршруту.


Конструкция должна мешать аппарату наматывать водоросли на винты.

Отмечу также открытое ПО BlueOS и возможность нести до 15 кг полезной нагрузки.


Заявляется работоспособность до 60 часов без подзарядки (с максимальным АКБ) и более 30 км на одном заряде.

Складная конструкция позволяет перевозить аппарат в багажнике легкового автомобиля.
Для чего, в теории, можно использовать этот мини-USV?
- Гидрографические съёмки: Проведение батиметрической съёмки дна и картографирование водоёмов.
- Научные исследования: Мониторинг качества воды, сбор данных об окружающей среде и океанографические исследования.
- Устойчивая аквакультура: Инспекция плантаций водорослей и мониторинг состояния ферм.
- Разработка и тестирование: Платформа для отработки алгоритмов автономной навигации и интеграции нового оборудования (сонаров, датчиков, камер)
Краткие характеристики платформы:
🔹 Запас хода (при скорости 1 м/с, без полезной нагрузки): 18 часов (65 км) с 2 батареями (532 Вт·ч); 62 часа (220 км) с 8 батареями (2128 Вт·ч)
🔹 Максимальная скорость (с 2 батареями, без нагрузки): 3 м/с (около 6 узлов)
🔹 Тип управления / Корпус: Дифференциальная тяга (раздельное управление двигателями) / Катамаран с водоизмещающим корпусом
🔹 Грузоподъемность (батареи + полезная нагрузка): 15 кг
🔹 Электропитание для полезной нагрузки: Напряжение батареи, ток до 60 А (прямое подключение); Напряжение батареи, ток до 10 А (через плату предохранителей); Вспомогательное питание 5В, ток до 5 А (через плату предохранителей)
🔹 Интерфейсы и подключения
= 3 x Последовательный порт (UART)
= Ethernet
= 2 x USB 2.0
= 2 x USB 3.0
= 1 x 16-битный АЦП (3.3 В)
= 1 x 16-битный АЦП (6.6 В)
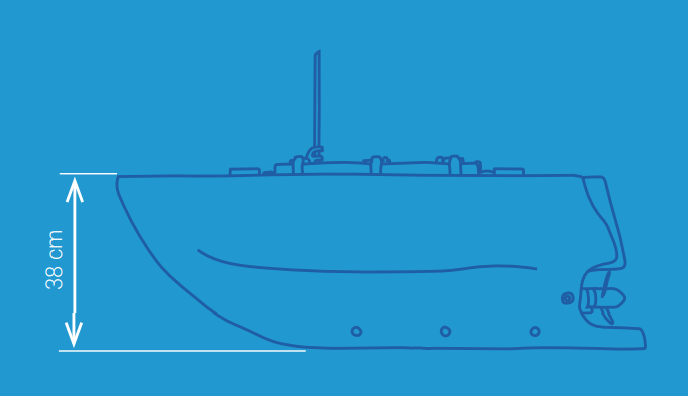
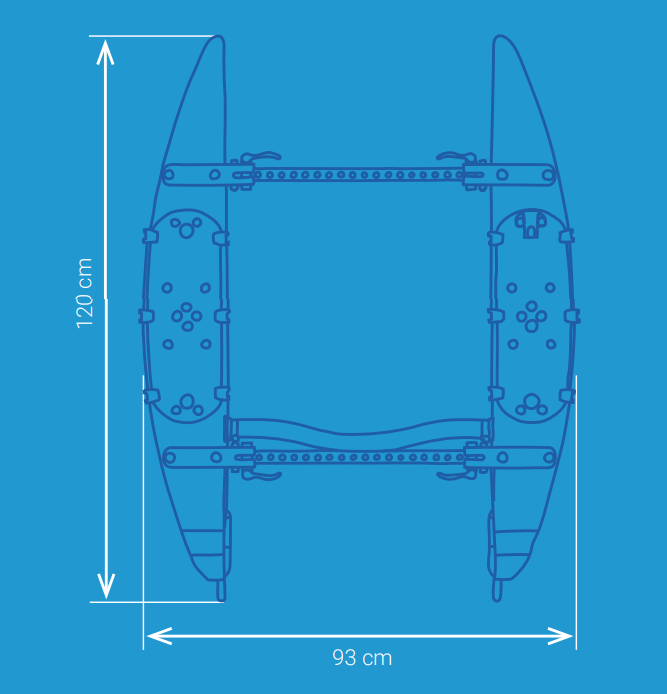
🔹 Габариты (Д x Ш x В)
• 120 x 93 x 46 см (в рабочем положении)
• 120 x 71 x 24 см (в сложенном виде)
• 120 x 46 x 20 см (в упаковке)
🔹 Вес (без батарей и полезной нагрузки) 14.5 кг
🔹 Движитель: 2 x Электродвигатель M200 с винтом, защищенным от водорослей

Программное обеспечение и навигация
🔹 Система управления - ArduRover
🔹 Бортовоя ОС - BlueOS
🔹 ПО для планирования миссий - QGroundControl или Mission Planner
🔹 Режимы навигации:
• Ручное управление (джойстиком)
• Навигация по точкам (Авто)
• Управление по клику (Guided)
• Удержание позиции (Lotter)
• Возврат домой (при потере связи)
🔹 Совместимые ОС
• Windows 10 (64-bit),
• macOS 10.20+,
• Ubuntu 20.04 LTS+
🔹 Бортовой компьютер: Raspberry Pi 4 (2 ГБ ОЗУ) с ОС BlueOS
🔹 Контроллер: Navigator Flight Controller
🔹 Сенсоры и датчики:
• 6-степенной IMU
• Два 3-степенных компаса
• Внутренний барометр
🔹 Модуль GPS: mRobotics M10034-M9N (на чипе NEO-M9N, IST8308)
🔹 Диапазон входного напряжения: 12–26 В постоянного тока (совместимость с батареями 4S–6S)
Есть ли аналогичная платформа в России? Я не припоминаю. А было бы неплохо иметь что-то подобное для стимулирование творчества, студенческих и научных разработок в области морской робототехники.
картинки и фото - Blue Robotics
- -