
Iver 2
Iver 2 -- Каталог подводных роботов
АНПА типа Slocum для масштабных обследований акваторий в открытом море и внутренних водоемках со скоростью течения не более 2 узлов.
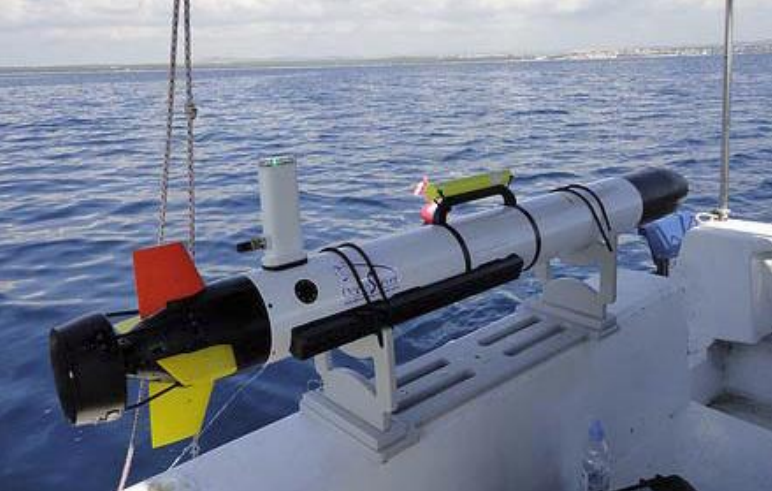
Автономный подводный необитаемый аппарат (АНПА) Iver2 предназначен для масштабных обследований акваторий в открытом море и внутренних водоемах со скоростью течения не более 2 узлов. Аппарат автономен, после запуска следует по траектории согласно заранее заложенной программе. Возможно экстренное завершение программы и дистанционное перепрограммирование аппарата. Приводится в движение гребным винтом посредством электродвигателя постоянного тока, питающегося от аккумуляторной батареи. Управление происходит с помощью отклоняющихся гидродинамических рулей.
Может использоваться для кратрирования дна, батиметрической съемки, инструментального мониторинга объектов экоконтроля, контроля состояния воды в требуемых районах.
Стандартная полезная нагрузка Iver 2 Oceanos:
- Гидролокатор бокового обзора (ГБО);
- 2 видеокамеры с фоторежимом;
- допплеровский лаг;
- измеритель скорости звука в воде;
- датчик солености/электропроводности воды;
- датчик температуры воды
Дополнительно могут быть установлены:
- гидролокаторы бокового обзора различных частотных диапазонов (в том числе ГБО высокого разрешения до 1600 кГц)
- профилирующие многолучевые гидролокаторы / батиметры;
- 10-лучевый допплеровский лаг с блоком контроля поверхности для высокоточной навигации и профилирования течений по всей толще воды
- буксируемый магнитометр
- полезная нагрузка по выбору заказчика
Внешний вид

Видео
Разработчик
Ocean Server Technology, Inc., США
страница продукта на сайте "Океанос":
iver-auv.com, описание на английском, скачать pdf
В России представлен ЗАО НПП ПТ "Океанос" (Научно-Производственное предприятие подводных технологий Океанос), С.Петербург, www.oceanos.ru
Особенности
Максимальная рабочая глубина: 100 м
Максимальная скорость: 2.5 узла
Автономность: до 14 часов
Точность навигации: 0.5% от дистанции
Расчетное энергопотребление: 600 Вт/час
Батарея: Li-Ion
Система управления: на базе Intel Atom 1.6 ГГц, рекордер 64 ГБ
Сервоприводы рулей: 48 В, 4 рулевых поверхности
Электродвигатели: безколлекторного типа, постоянного тока, 48 В, с магнитной муфтой гребного винта, 3-х лопасной гребной винт фиксируемого шага, изготовлен из морской бронзы
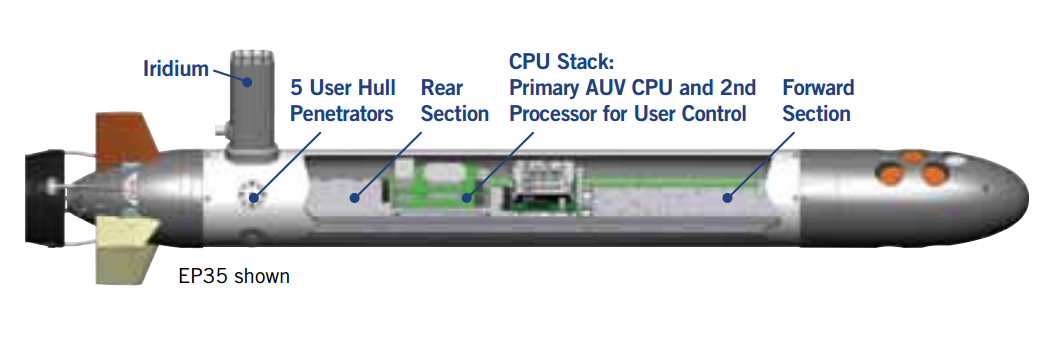
Средства связи и протоколы передачи информации: Wi-Fi 802.11, система управления 2.4 ГГц с выносным пультом радиоуправления, спутниковый модем Iridium 9602 для аварийной связи
Системы навигации и сенсоры:
- стандартный модуль GPS (работает на поверхности) - для получения начальных абсолютных координат аппарата при нахождении его на поверхности в точках всплытия. Антенна находится в вертикальном киле в средней части аппарата
- допплеровский лаг DVL - для отслеживания перемещения аппарата относительно дна, для получения профиля морских течений и навигации аппарата в подводном положении. Антенна допплеровского лага направлена вниз и находится в передней части аппарата за носовой оконечностью.
- гидролокатор бокового обзора - для получения картины дна. Антенны гидролокатора бокового обзора (ГБО) размещены по сторонам корпуса в кормовой оконечности в нижней части корпуса
Внутренние системы навигации: магнитный компас на материнской плате, датчик глубины погружения
Видеокамеры: 2 цветные видеокамеры переднего и нижнего обзора, разрешением 720 dpi, установленные в носовом обтекателе
Поверхностное оборудование: ЗУ, ноутбук класса "нетбук" с установленным ПО АНПА на базе Windows 8, пульт ДУ с ЖК-монитором, комплект документации и ПО, транспортная упаковка
Устройство аварийного всплытия: буксируемый цилиндр из АБС-пластика диаметром не более 10 см и длиной 35 см, ярко-оранжевого цвета. Отсоединяемая крышка, аварийный буй-парашют из синтетической ткани, баллончик CO2 (не входит в комплект), дистанционный включатель. При возникновении аварийной ситуации происходит разворачивание парашюта, наполнение его углекислым газом из баллончика, что вызывает аварийное всплытие устройства и присоединенного к нему АНПА.
Статус
Разработан в 2005 году. Выпускался в различных модификациях: EP32, EP35, EP42, отличающихся мощностью аккумуляторной батареи и длиной корпуса. Закупался различными странами, включая Россию, Хорватию и т.п. в гражданских и военных целях. Базовая цена составляла $50 тысяч, с полной комплектацией (ГБО + система навигации по допплеровскому лагу) - порядка $150 тысяч. К 2009 году было продано более 100 комплексов на базе Iver 2.
+ +










