
TurtleROV
TurtleROV -- Каталог подводных роботов
ТНПА, телеуправляемый необитаемый подводный аппарат.
Внешний вид

Разработчик
ELMICS (Electronic Microsystems - "Электронные микросистемы"), Россия, Зеленоград
Краткие данные
Подводное устройство
максимальная глубина: 400 метров
размеры: 55 х 45 х 30 см
круизная скорость до 3 узлов
скорость течения: до 1.5 узлов
вес на суше: порядка 13 кг
плавучесть: нейтральная в пресной воде
Наземная часть
питание: 220 В переменного тока, 8 А
питание по кабелю: 360 В постоянного тока
потребляемая мощность: 1700 Вт
джойстик: с поддержкой режима YAW
запись видео: MJPEG, .avi
настройка: через OSD
управляющий компьютер (ПК): Intel STCH1A8LFC или аналогичный, или профессиональный ноутбук под Linux
Модуль фронтальной камеры
модель MTV33SR88H, Multivision
разрешение: 540 TVL, цветная
сенсор: 1/3" CCD Interline Transfer
чувствительность: 0.05 люкс
углы поворота +/- 60 градусов
3 LED светодиода: 900 лм, переменная интенсивность
Модуль камеры заднего вида
модель: DS-M132, DALS Semi
разрешение: 420 TVL, черно-белая
сенсор: 1/3" SONY Super HAD II
чувствительность: 0.01 люкс
углы поворота +/- 60 градусов
3 LED светодиода: 1050 лм, переменная интенсивность
Кабель
максимальная длина: 600 метров
диаметр кабеля: 12 мм
устойчивость к натяжению: 150 кг
максимальная рабочая нагрузка: 75 кг
вес (на суше): 12 кг / 100 м
лебедка: возможна (опционально)
Трастеры
4 горизонтальных, 2 вертикальных
конфигурация X-типа
тип двигателя: магнитосопряженные
двигатели постоянного тока: 10А
Система навигации
тип: инерциальная навигация (10 DOF)
точность гиро сенсора: 0.03 градуса в секунду
точность сенсора глубины: +/- 1% F.S.
точность компаса: +/- 1 градус
частота обновления данных о местоположении - 10 Гц
стабилизация по видеопотоку: да (опционально)
режим автокалибровки: поддерживается
картографирование траектории движения: поддерживается
режимы автоматического позиционирования: глубины, направления, местоположения, высоты
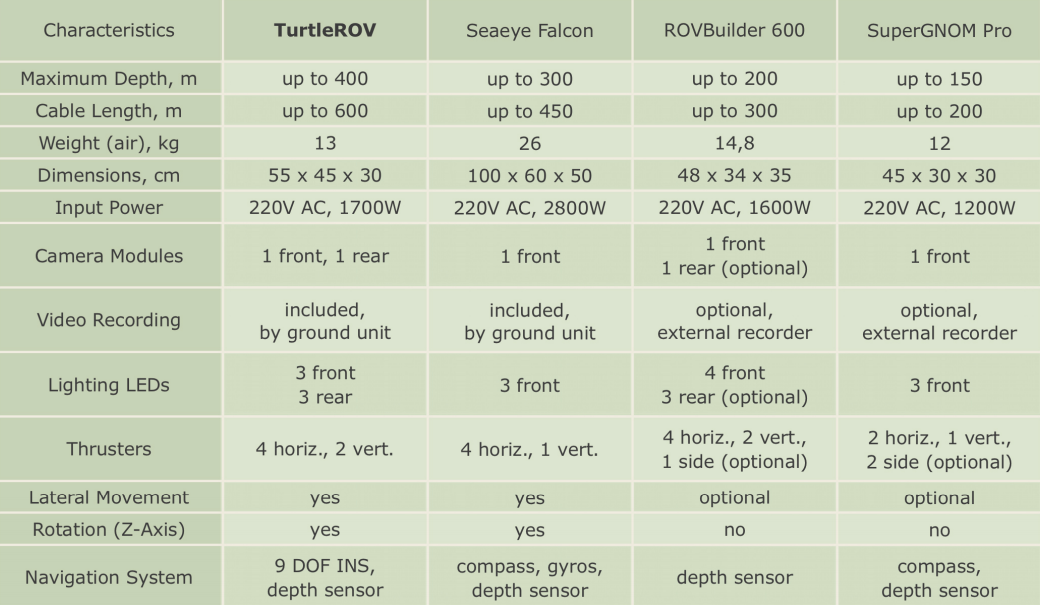
Сравнение с конкурентами
Дополнительная информация на сайте разработчика
Видео
++









