Интервью: Universal Robots - впереди планеты всей. Часть 2
20.04.2017В конференции “РобоСектор 2017” принимала участие компания Universal Robots - самый известный в мире производитель коллаборативных роботов. На встрече компанию представляли российские сотрудники. Евгений Израйлит и Сергей Пташников ответили на вопросы редакции RoboTrends. Представляем вашему вниманию вторую часть этой беседы (первую часть можно найти по ссылке). Вопросы задавал Алексей Бойко, главный редактор RoboTrends.
АБ: Владельцем компании Universal Robots на сегодняшний день является американская компания?
СП: Полтора года тому назад компанию у датчан приобрела Teradyne, мировой лидер в производстве оборудования для тестов. Американский владелец привнес в компанию значительный вклад, прежде всего, в оценке качества. Отказов роботов, в итоге, стало существенно меньше. Мало того, что в роботе постепенно исправлены его «детские болячки», налажен подход к обеспечению высочайшего качества.
АБ: Я правильно понимаю, что роботы линейки производятся по-прежнему в Дании?
СП: Завод в Дании, в Оденсе. Это такой технологический кластер, где сконцентрированы производственные машиностроительные компании. Например, суставы робота буквально через дорогу фрезеруются.
АБ: То есть не все комплектующие собственного производства?
ЕИ: Мы не производим комплектующие, их для нас производят лучшие в мире специалисты. Такой подход позволяет сконцентрироваться на разработке и производстве самого робота.

Робот UR3 прикручивает волновой редуктор к суставу. По рекомендации Harmonic Drive AG, операция сборки производится при вращении редуктора, человек так не сможет.
АБ: Выпускаемые вами роботы - шестиосевые. На недавней выставке в США ваш партнер Festo показал решение для расширения возможностей 6-осевых манипуляторов UR еще на одну ось - горизонтальную или вертикальную. Почему компания не делает роботов с семью осями?
ЕИ: Есть большая разница между поступательной осью и осью вращения. Решение Festo - поступательные оси. Они позволяют значительно расширить область работы робота, например метров на десять, тогда один робот сможет обслуживать весь станочный парк - исключительно полезная вещь! Мы не производим линейные модули по той же причине почему не производим, например, захватные устройства.
Седьмая ось вращения на роботе - совсем другая история.
6 суставов дают 6 степеней свободы - возможность позиционирования в трех координатах и ориентация рабочего инструмента по трем углам.
Седьмой сустав добавляет роботу гибкости и позволяет вращать остальные суставы вокруг этой точки, сохраняя и позицию и ориентацию.
Это может быть полезно в сильно ограниченном пространстве, но в реальной практике производства она не нужна.
Надо понимать, что это не только удорожает манипулятор на ⅙ цены, но и требует больше вычислительных ресурсов для расчета траектории движения.
АБ: А почему не производите захватные устройства?
ЕИ: А почему Apple не пишет весь софт и игры для айфона сама?
Во-первых специализация, во-вторых это часть политики компании по мотивации партнеров по экосистеме - вместо того чтобы затмевать сторонних производителей, мы продвигаем их, поэтому сейчас так активно развивается рынок периферии.
АБ: Вы о программе UR+ ?
ЕИ: Да, мы предоставляем компаниям производителям площадку для продвижения их устройств , предоставляем SDK для разработчиков, которое позволяют написать приложение-драйвер и встроить его в оболочку робота. Устройства устанавливаются автоматически, на пульте управления добавляется кнопка, меню настроек, добавляются функции программирования для скриптового режима. Например, при подключении Смарт-камеры прямо в пульте можно смотреть видео в режиме live, обучить систему распознавания.
АБ: Компания как-то проверяет конечный результат?
ЕИ: Конечно. Все устройства, представленные на сайте, прошли тестирование, и многократно опробованы в полях.
АБ: Можно ли подключить стороннее устройство?
ЕИ: Можно подключить все что угодно, робот максимально открыт для интеграции. Даже если у устройства нет совсем никаких интерфейсов, как например у обычной дрели - всегда можно поставить реле и управлять цифровым выходом робота.
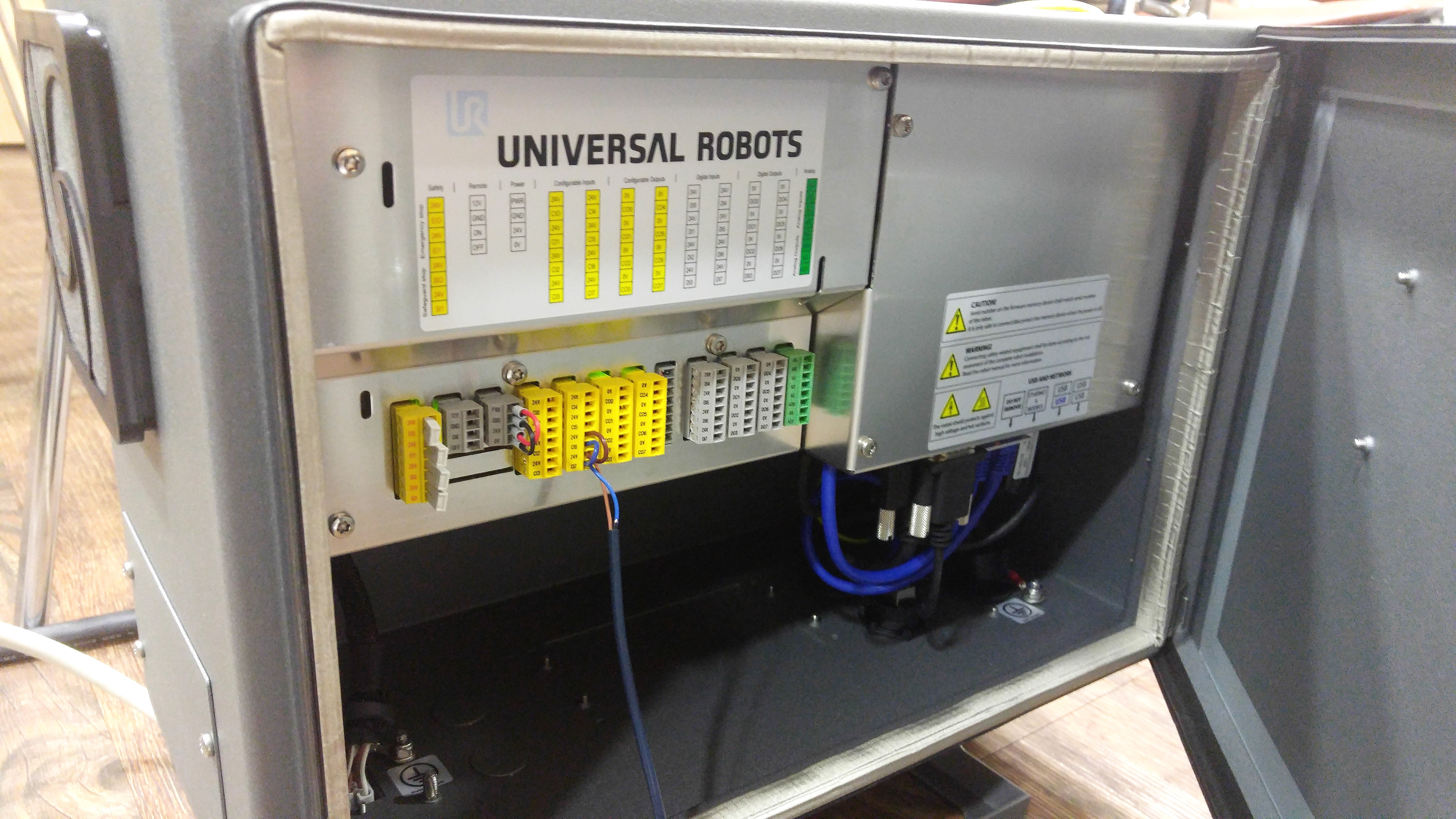
Внутри контроллера: справа промышленный ПК, на котором работает операционная система управления роботом, слева колодки подключения аналоговых и цифровых портов ввода вывода.
АБ: А что за захват сейчас на роботе?
ЕИ: Электромеханический захват OnRobot RG2. Регулируется масса его параметров, начиная с углов раскрытия и закрытия, скорости и ускорения, и до силы захвата.
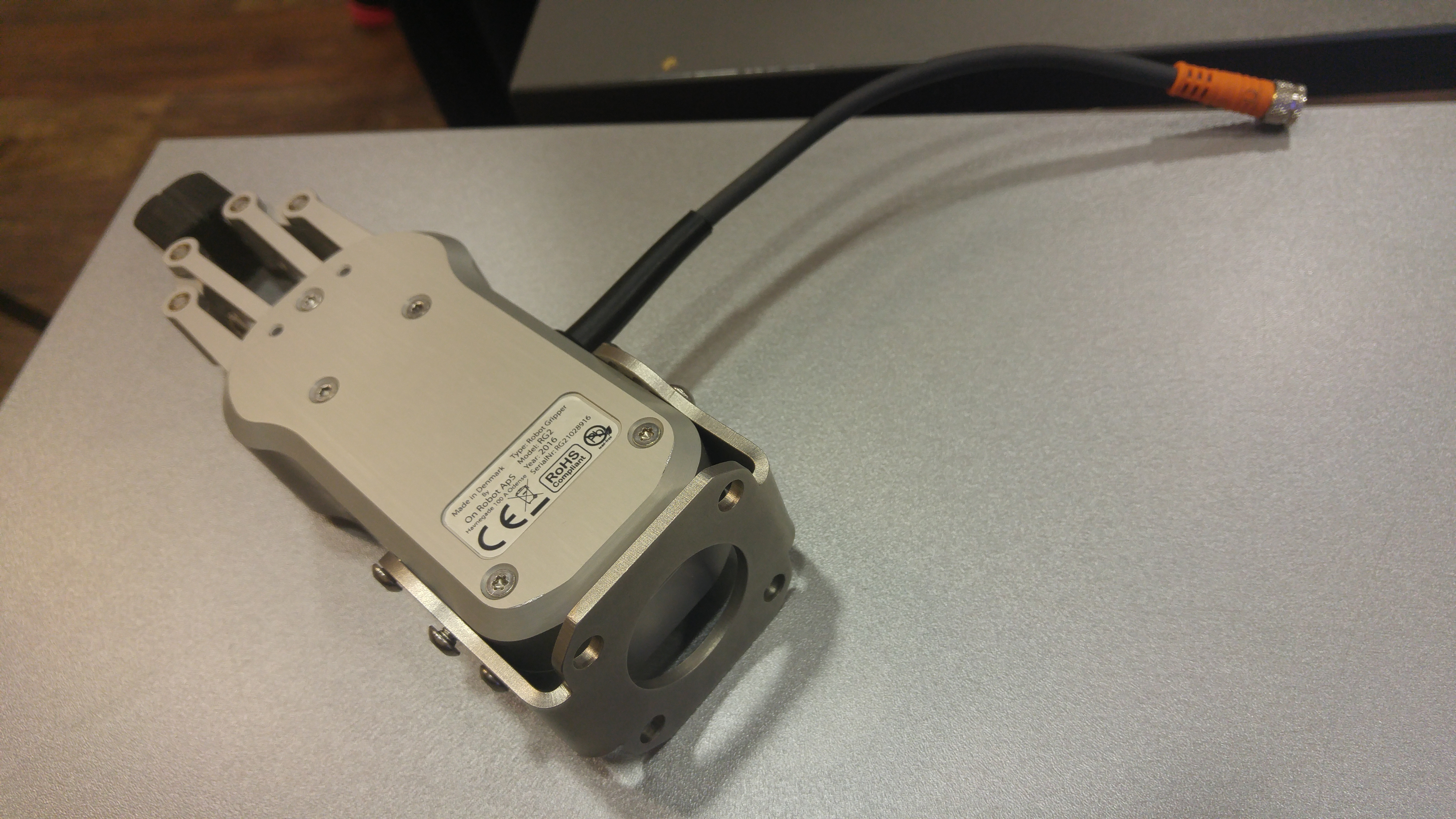
Электромеханический захват OnRobot RG2.
Кстати, этот гриппер делает компания из трех человек, и они успешно продают его по всему миру.
АБ: Какие еще интересные устройства есть в вашей коллекции?
ЕИ: Мне понравилась система трехмерного компьютерного зрения . Она может находить и доставать произвольно сложенные в коробку и частично перекрытые друг другом детали сложной формы, узнавая их по заложенной в программу модели, может работать и в гибком режиме с произвольными объектами простой геометрической формы без предварительного обучения: Например, запросто сможет переложить содержимое корзины на ленту кассы в супермаркете. Или наоборот, попутно пробивая товары.
Периферия для промышленной робототехники - отличная ниша для технологических стартапов. Присоединяйтесь, будем рады видеть вас в нашем каталоге!
+ +