

Облачная робототехника: Тренды, Технологии, Связь
23.07.2017GTI совместно с Huawei Wireless X Labs, China Mobile, SoftBank, CloudMinds и Skymind представила официальный документ по технологии 5G и облачной робототехнике «5G&Cloud Robotics White Paper». В нем описаны концепции, технологии, рыночные тренды, цепочка формирования стоимости и бизнес-модели облачной робототехники, а также представлен подробный анализ того, как технология 5G будет способствовать коммерческому успеху. Редакция RoboTrends.ru представляет русскоязычную версию документа, перевод которой подготовлен Алексеем Бойко.

Кратко
Облачные роботы управляются "мозгом" в облаке. Расположенный в дата-центре мозг использует ИИ и другие современные программные технологии для решения задач, которые при традиционном подходе решаются локальным встроенным контроллером. По сравнению с традиционными роботами, облачные роботы будут формировать новые цепочки создания ценности, новые технологии, новый опыт и новые бизнес-модели. В данном документе рассматриваются эти аспекты.
1. Введение
Облачная робототехника - это сравнительно недавно придуманная концепция. Первые работы на эту тему стали появляться в 2010 году, когда начался проект RoboEarth Еврокомиссии (). Целью этого проекта было формирование "интернета для роботов". RoboEarth и, позднее, в таких проектах, как Rapyuta () и Robohow () были сформулированы базовые концепции и технологии, которые все еще оказывают влияние на разработки в области облачной робототехники.
Есть три базовых преимущества облачных роботов, по-отношению к классическим автономным роботам:
Разделение информации. Множество облачных роботов может управляться из одного центра, при этом данный центр может аккумулировать визуальные, вербальные и другую данные об окружающей среде, поступающие от всех подключенных роботов. Полезную информацию, выделенную из этих данных можно использовать для всех роботов, подключенных к данному центру управления. Как и в случае с другими облачными сервисами, информация, собранная и обработанная каждым из роботов, всегда остается "свежей" и надежно заархивированной. В выигрыше и разработчики - любое их решение является переиспользуемым для всех подключенных к облаку роботов.
Разгрузка вычислительных мощностей. Некоторые задачи, с которыми сталкивается робот, требуют больших вычислительных мощностей, чем те, что может обеспечить местный контроллер (экономически разумным образом). Разгрузка в облако задач, требующих существенной обработки, таких как распознавание голоса и изображения, синтез голоса, картографирование окружающей среды, планирование движений, снижает требования к бортовому "железу", а также к энергопотреблению роботов, что позволяет делать их легче, меньше и дешевле.
Коллаборативность. Облачные роботы могут работать совместно. Используя облако, как общую среду, два робота могут работать совместно, например, чтобы перенести объект, который слишком тяжел для одного. Группа простых рабочих роботов могут выполнять работы с использованием одной локальной карты, которую создаст для них робот-лидер, оснащенный необходимыми для картографирования сравнительно дорогими сенсорами.

рис. 1. Массовый сбор данных за счет использования массива из 14 роботов. Роботы делятся опытом друг с другом за счет использования алгоритма машинного обучения.
Распределенная версия AlphaGo использует 40 поисковых потоков, 1202 процессоров CPU и 176 графических процессоров (GPU) (). Ни один современный робот не может обладать такой вычислительной мощностью на борту. Облачный робот может применять такую вычислительную мощность для решения стоящих перед ним задач.
2. Приложения для облачных роботов
Использование облачных ресурсов умощняет роботов и дает им новые возможности в самых различных областях:
-
Интеллектуальная обработка визуальной информации:
классификация изображений, обнаружение целей, сегментация изображений, создание описаний изображений, распознавание объектов. -
Обработка естественного языка:
понимание семантики на основе глубокого обучения, точное понимание намерений пользователя, анализ вариантов намерений, анализ эмоций. При этом облачный робот может опираться на мощные базы знаний. -
Распознавание лиц:
алгоритм распознавания лиц основанный на глубоком обучении позволяет, например, точно детектировать лица на видео в реальном времени. Лица распознаются также в тех случаях, если они видны только под углом, частично размыты или наполовину закрыты другими объектами. -
Расширения относительно текущих приложений:
навигация по картам местности за пределами помещения; позиционирование и навигация в помещении; опознание типовых продуктов; идентификация универсальных предметов; понимание окружающей среды; чтение текста; голосовые уведомления.
Приложения, которые появляются для облачных роботов, самые разные - некоторые уже появляются, другие на ранней стадии формирования.
Логистика
Amazon, Jingdong, S.F. Express и другие компании внедрили логистические роботизированные системы. Колесные управляемые платформы (Automated Guided Vehicle) - это основной тип логистических роботов (хотя логистические компани также стараются использовать летающие беспилотники). За счет подключения AGV к облаку можно добиться унификации распределения задач между ними, что превращает склад с несколькими AGV в единую систему с максимальной эффективностью. Кроме того, AGV можно оборудовать системами машинного зрения и передавать видео в облачные системы, чтобы распознавать различные ситуации, которые могут возникать на дороге. Такой подход позволяет использовать AGV не только в пределах управляемой территории, но и за ее пределами, например, в общественных местах для доставки пакетов или питания.
Безопасность и системы наблюдения
В общественных местах, облачные роботы могут проводить контроль безопасности в режиме 24/7, что позволяет заменить ими персонал, занимающийся вопросами безопасности. Облачный робот будет собирать видео и цифровые снимки, а также пересылать их в облако общественной безопасности для идентификации в реальном времени подозрительных людей или ситуаций. Такие роботы уже используются, например, в аэропорте Шеньженя в Китае.
Персональная поддержка и забота
Обеспечение персональной поддержки и заботы пожилым людям - это "следующий большой тренд" в робототехнике. Мощность облака делает таких роботов похожими на людей. Они могут проводить мониторинг здоровья в реальном времени, помогать людям передвигаться и выполнять работу по дому. В качестве примера такого робота, можно вспомнить робота Romeo компании Softbank.
Гиды
В общественных местах, таких, как предприятия, банки и больницы, роботы, такие, например, как Pepper, Softbank используются для сопровождения посетителей. Они также применяются для оказания услуг помощи в розничной торговле, включая таки компании, как Nestle, Yamada Electric и Mizuho Bank. Облачные роботы могут пользоваться объемными базами знаний в облаке и коммуницировать с использованием естественного языка; они даже могут распознавать выражения лица человека с использованием облачного ИИ, чтобы улучшить пользовательский опыт.
Образование, развлечения и компаньоны
В прошедшие годы, приложения машинного зрения и ИИ были использованы для разработки различных роботов, предназначенных для использования в области образования и в развлечениях. Примеры включают Jibo, Asus Zenbo и Softbank Nao. Эти роботы обладают гуманоидным интерфейсом и могут работать с естественным языком. Они могут загружать контент из облака, чтобы обеспечивать образовательные и развлекательные услуги.

Рис. 2. Облачные смарт-устройства и роботы с поддержкой коммуникаций с человеком
Источник: Softbank
3. Рыночные тренды
Роботов можно разделить на промышленных роботов и сервисных роботов, в зависимости от их основного назначения. Сервисных роботов, в свою очередь можно делить на профессиональных сервисных роботов и персональных домашних сервисных роботов. Профессиональные сервисные роботы могут использоваться в медицине, конструировании, подводном инжиниринге, логистике, системах защиты и безопасности. Персональные домашние сервисные роботы используются для домашней работы, служат компаньонами и персональными ассистентами, а также используются в других областях. Такие роботы уже используются в аэропорту Шеньженя в Китае.
$226.2 млрд
Исследование рынка, проведенное компанией Tractica, общий рынок роботов вырастет с $34.1 млрд в 2016 году до $226.2 млрд в 2021 году, что соответствует среднегодовому росту (CAGR) в 46% в деньгах. Наибольший вклад в рост рынка обеспечат не-промышленные роботы ().
$2 млрд
Один из основных драйверов этого рынка - рост стареющего населения. Все меньше людей рабочего возраста занимаются заботой о пожилых. Согласно прогнозам ООН, к 2050 году возраст 21% всего населения планеты превысит 60 лет, а общее число таких людей - 2 млрд. Роботам предстоит сыграть свою роль в заботе об этих людях. Кроме того, промышленная автоматизация будет продолжатся высокими темпами, в рамках таких инициатив, как "Промышленность 4.0" в Германии и "Сделано в Китае 2025".
Развитие технологий включает ИИ, IoT и беспроводную связь, повышая способности роботов. Уже сейчас они способны идентифицировать окружающее пространство, калибровать свое местоположение, планировать траектории движения и использовать натуральные интерфейсы для взаимодействия с людьми. Наблюдается рост возможностей роботов, применяемых в промышленности, сельском хозяйстве, логистике и образовании. Быстрый рост использования беспилотников также свидетельствует рост возможностей робототехники.
Облачные роботы вскоре станут привычными
Облачный ИИ и подключенность задают вектор развитию рынку робототехники. на несколько ближайших лет. Такие технологии уже начали изменять способ, каким взаимодействуют люди: технологические гиганты разрабатывают системы на базе искинов, которые используются все шире. В качестве примеров можно вспомнить Google Cloud Speech API, Amazon Alexa, Baidu Duer, IBM Watson, Apple Siri и Microsoft Cortana.
12%
Согласно оценкам Huawei, к 2025 году использование мобильной подключенности и искинов приведет к росту проникновения роботов в семьях вплоть до 12%; интеллектуальные роботы изменят лицо промышленности примерно так же, как менялся автопром в XX веке.
Согласно прогнозам GTI, к 2020 году подключенные роботы составят порядка 90% всех роботов,
а также около 20 млн новых подключений, которые потребуются ежегодно для поддержки их работы.
Рабочая группа облачной робототехники GTI провела детальное исследование рынка робототехники. Согласно прогнозу, к 2020 году доля подключенных роботов в мире достигнет 90%. Рисунки ниже демонстрируют прогнозы продаж подключенных роботов.
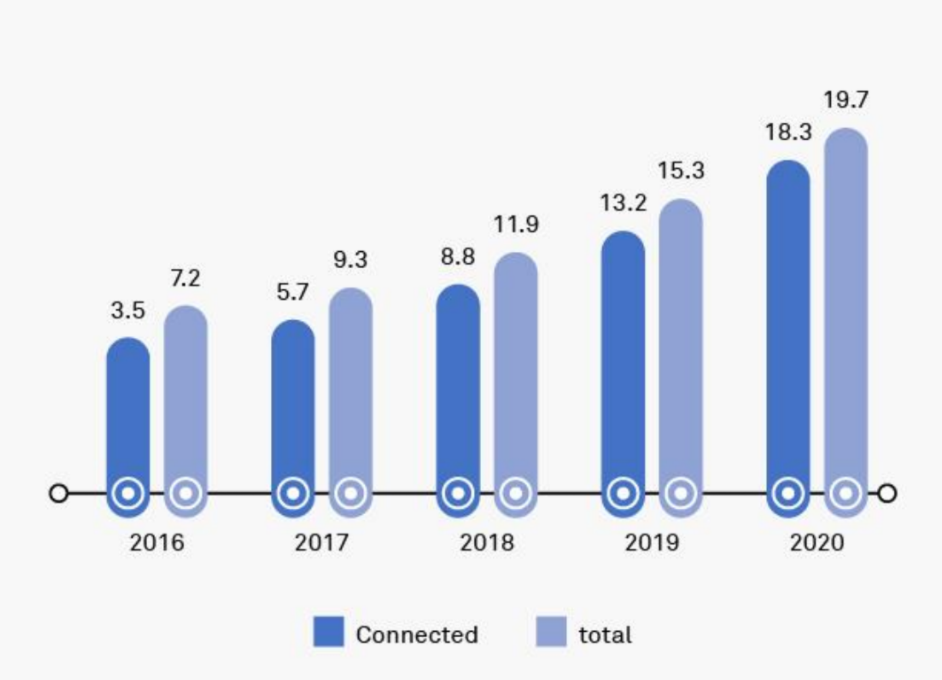
Рис.3. Продажи подключенных роботов в 2016-2020 годы, в млн (подключенные, всего)
Источник: данные рабочей группы облачной робототехники GTI
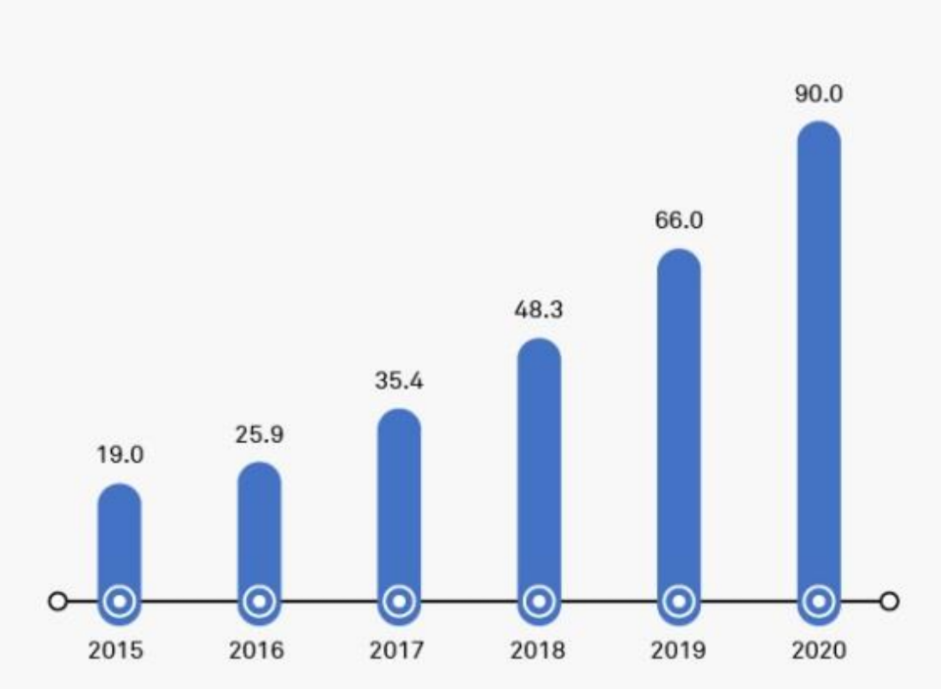
Рис.4. Подключенные логистические роботизированные системы (в тыс.)
Источник: Рабочая группа Облачная робототехника GTI
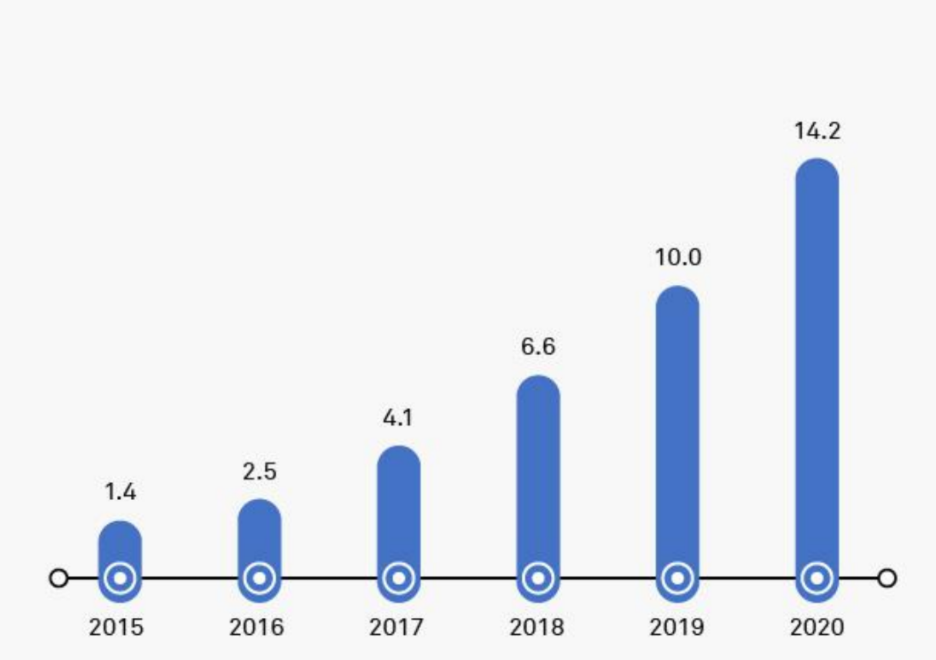
Рис.5. Подключенные домашние роботы (млн.)
Источник: Рабочая группа Облачная робототехника GTI
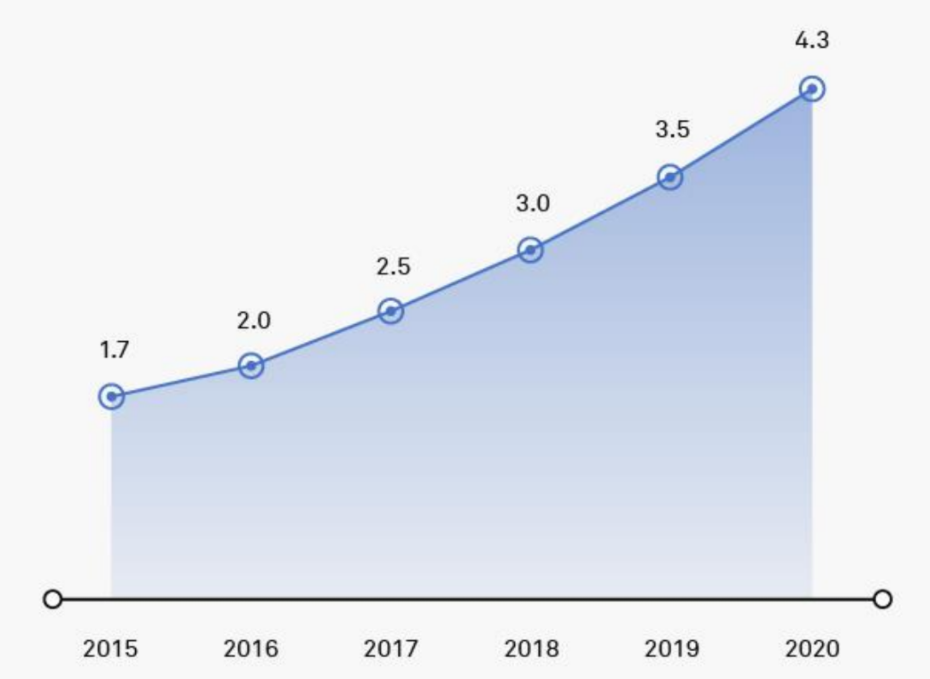
Рис.6. Подключенные развлекательные роботы (млн)
Источник: Рабочая группа Облачная робототехника GTI
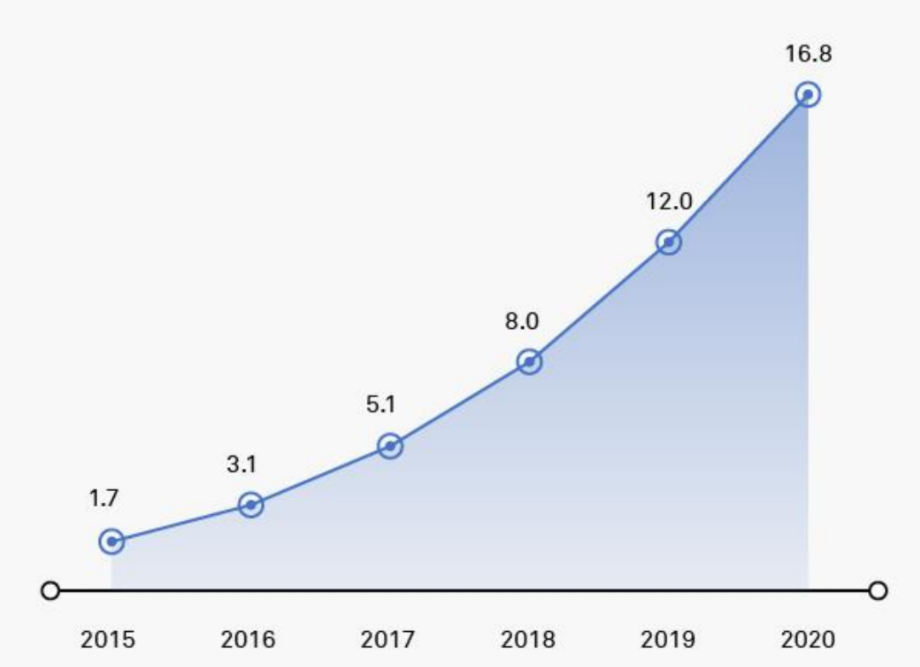
Рис.7 Подключенные ассистивные роботы для заботы о пожилых и ограниченно подвижных, в тыс. Источник: Рабочая группа Облачная робототехника GTI
В ближашие несколько лет домашние роботы и роботы для рекреации будут составлять основную долю подключенных роботов. По мере роста возможностей роботов, будет расти востребованность сервисных роботов у частных лиц и семей.
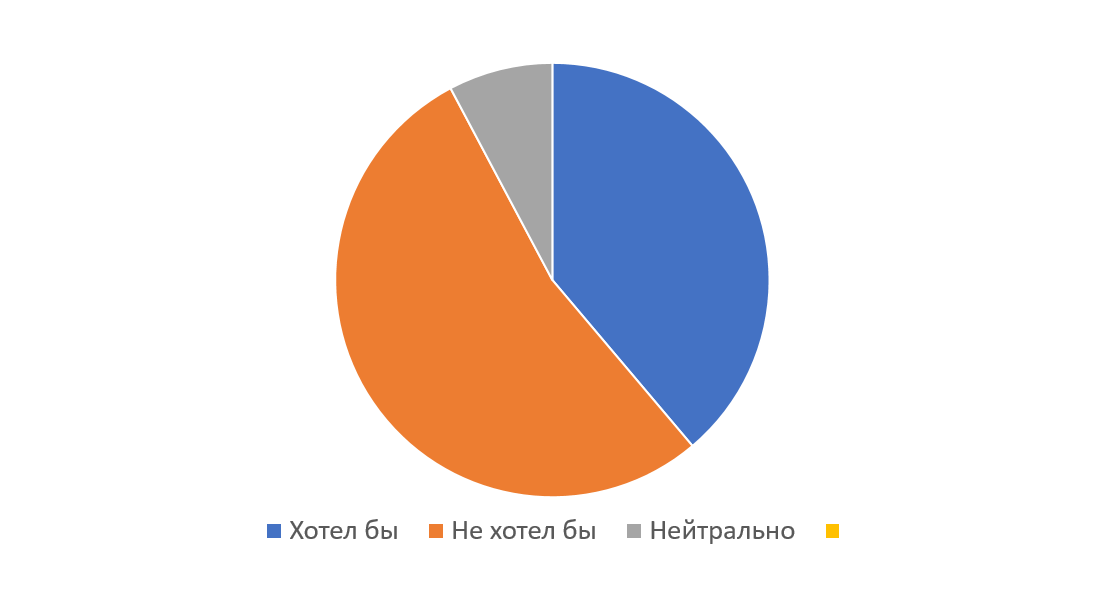
Рис.8 Желательность использования ИИ и роботов в здравоохранении (Источник: PwC)

Рис.9 Желательность применения роботизированной хирургии (Источник: PwC)
В настоящее время не так уж велика востребованность роботизированных услуг, особенно медицинских. Люди со скепсисом относятся к тому, что роботы могут достичь уровней навыков человека-врача. Однако в ближайшие несколько лет, по мере того, как возможности роботов существенно вырастут, восприятие людьми роботизированных медицинских услуг заметно улучшится.
Согласно исследованию, представленному инициативой Открытая Робоэтика (Open Roboethics Initiative) основные ожидания от домашних сервисных роботов - это их возможность выполнять работы по дому, которые облегчат жизнь. Кроме того, достаточно выражены ожидания от роботов содействия в образовании, инспекции и безопасности.
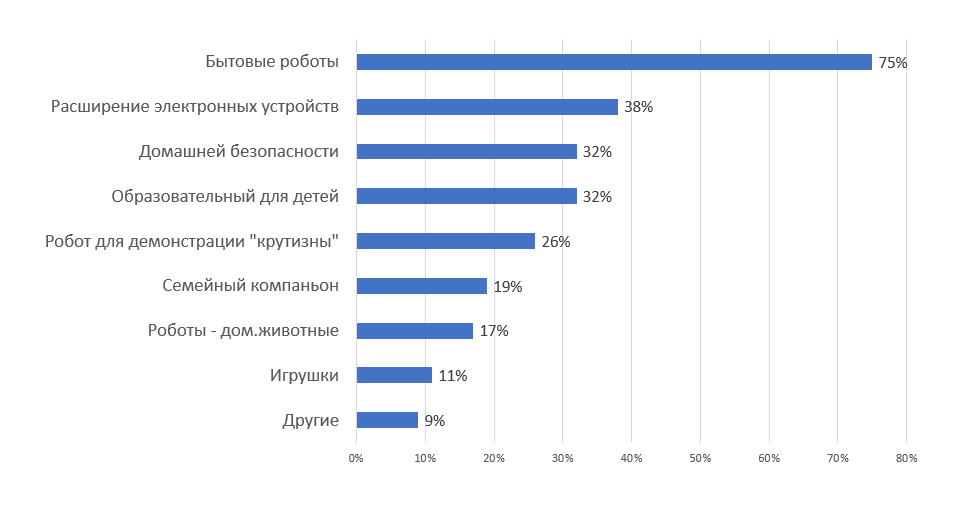
Рис.10 Причины для приобретения домашнего роботов (Источник: Открытая Робоэтика).
4. Цепочка формирования ценности облачной робототехники
Цепочка формаирования ценности облачной роботехники показана на рис. 11. Роботизированная платформа представляет из себя робота, который выполняет приложения; эти приложения используют интеллектуальные сервисы провайдера ИИ, что позволяет использовать мобильную сеть для осоздания "опыта" смарт-пользования конечным потребителям.
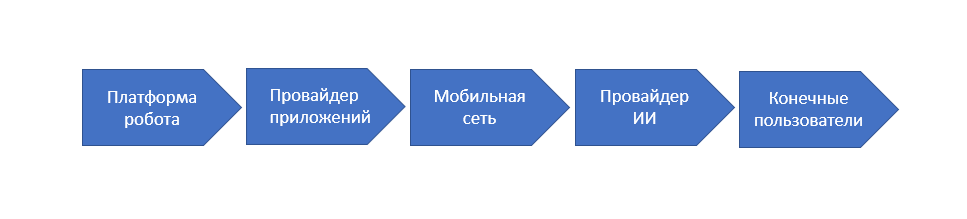
Рис. 11 Цепочка формирования ценностей облачной роботехники
Источник: Рабочая группа облачной робототехники GTI
4.1 Роботизированная платформа - технологии на базе которых реализуется облачная робототехника
Определение робота может отличаться по контексту, но самое общее определение таково: "Механическая система, состоящая из трех элементов: контроллер, сенсор и эффектор/актуатор".
Контроллер
По мере того, как роботы становятся все более сложными, а требования к ним становятся все более "продвинутыми", контроллерная часть также развивается и сегодня роботы часто управляется операционной системой или мощным связующим слоем ПО, как, например, ROS (), OpenRTM-aist, связующим ПО, совместимым с требованиям Object Management Group (OMG) Robotic Technology Component (RTC) Specification (), NAOqi (OS, используемая в Pepper, компании Softbank).
В облачной робототехнике, контроллер формируется, как координация облачной и локальной систем.
Сенсоры
Для создания роботов используют различные типы сенсоров, соответствующих реализуемым функциональностям. Наиболее важные типы сенсоров это:
Камеры и микрофоны: для восприятия окружающей среды требуются камеры и микрофоны. Например, в роботе Softbank Pepper () задействована камера 3D и две камеры HD (рис. 12) и четыре направленных микрофонов, чтобы детектировать, откуда исходят звуки, и определять позицию пользователя.

Рис.12 Набор микрофонов и верхняя камера в роботе Pepper
Источник:
3D-камеры используются для обеспечения определения позиции робота и картографирования (часто этот процесс обозначают аббревиатурой SLAM - одновременное позиционирование и картографирование). Также используются и другие сенсоры для 3D-позиционирования, от недорогих сенсоров приближения, сонаров и фотоэлектрических сенсоров до более точных, но дорогостоящих технологий, таких, как LiDAR (лазерный дальномер), что позволяет строить 3D-картину окружающей среды с высоким разрешением и широким охватом.
Беспроводные сети должны обладать достаточной пропускной способностью и низкими задержками, чтобы пересылать данные от сенсоров к контроллеру. По мере роста точности сенсоров, требуется все большая пропускная способность сети.
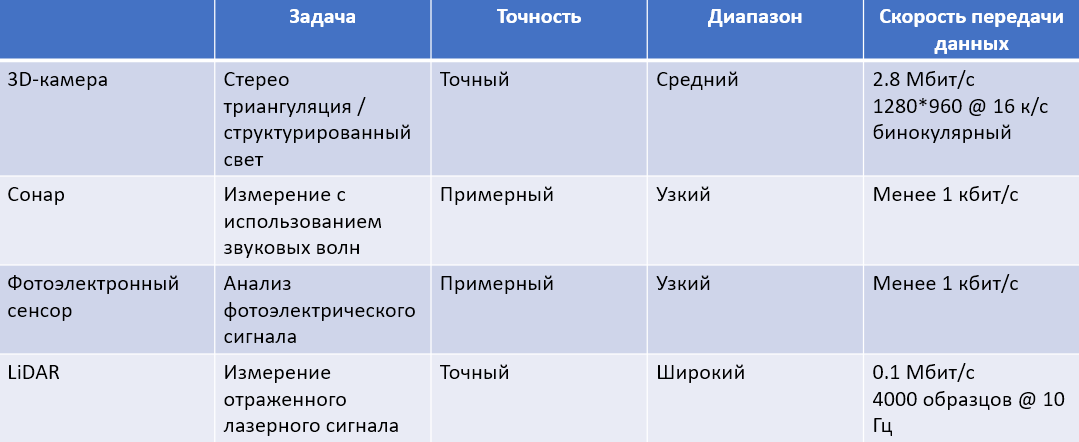
Рис. 13 Описания сенсоров изображения и требования
Источник: рабочая группа в области облачной робототехники GTI.
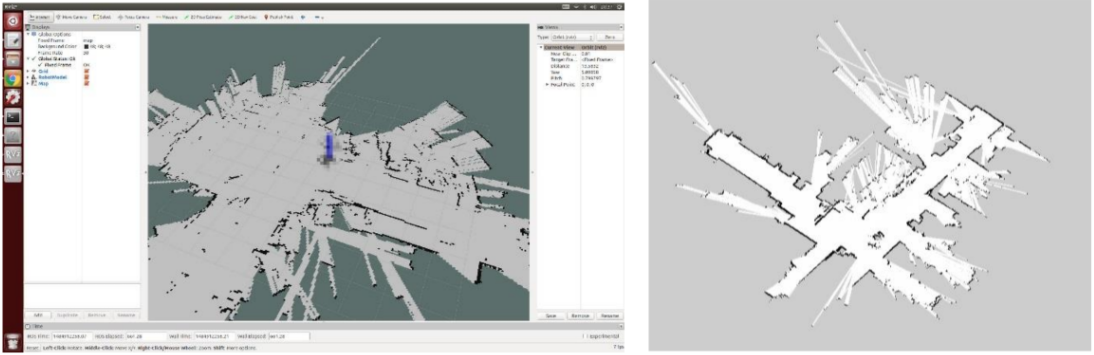
Рис. 14 Процесс SLAM визуализирован с помощью RVIZ, специального инструмента для использования с ROS, а также пример получаемой в результате карты. Источник: Softbank
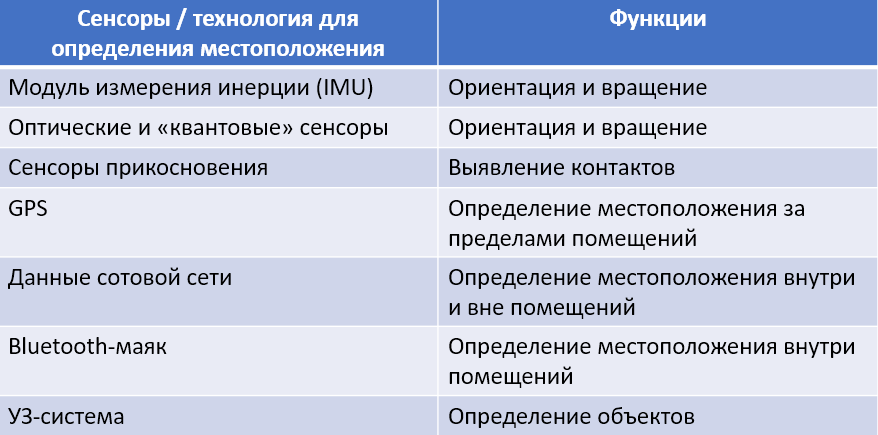
Гироскопы, акселерометры, магнетометры и другие сенсоры. Эти сенсоры позволяют роботу ориентироваться, знать свое местоположение и вектор движения.
Эффекторы / актуаторы
Большинство актуаторов, используемых в робототехники - это электрические устройства, хотя также применяются гидравлические и пневматические актуаторы. Каждый тип актуаторов обладает своими преимуществами и недочетами (см. рис. 15).
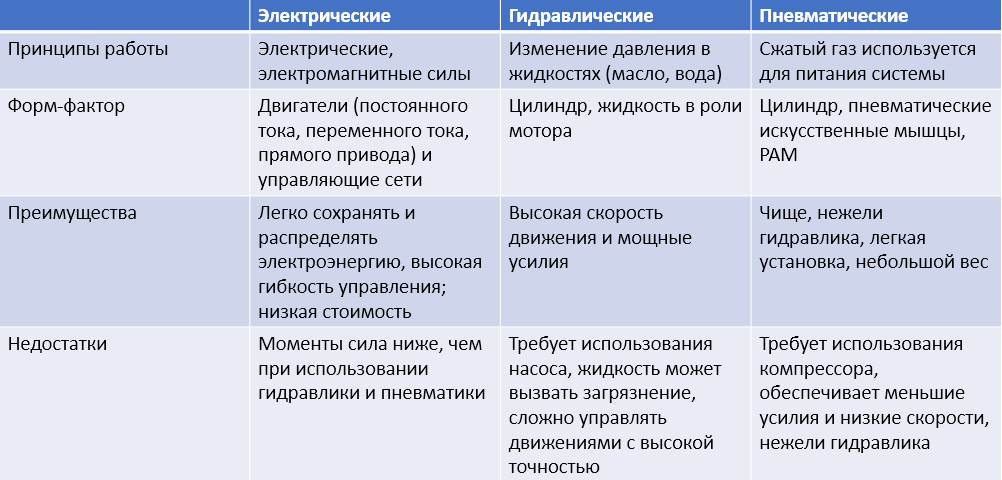
Рис. 15 Сравнение приципов действия роботизированных актуаторов для роботов; Источник: Softbank
Новые разработки в области мобильности
Роботизированные платформы требуют усовершенствования. Нужны роботы, способные дольше работать без подзарядки, более мобильные, которые способны проходить большее расстояние, которые могут иметь возможность воспринимать окружающую среду, одновременно выполнять локализацию и картографирование (SLAM).
Одна из задач, которые требуется решить - это обеспечение высокой мобильности, особенно на пересеченной местности, или в условиях лестниц и дверей, например, при использовании ходящих (шагающих) роботов с двумя и четырьмя конечностями. Такие системы требуют постоянного поддержания баланса, что требует высокого потребления энергии, а также соответствия требованиям безопасности. Требования безопасности, предъявляемые к роботам, могут варьироваться в зависимости от страны и местных условий: одно из возможных решений - это относиться к роботам, как к пешеходам, или мобильным скутерам. Могут требоваться установление ограничений по скорости движения роботов и по дистанционному их мониторингу (возможно не столь жесткие, как в случае с автономными устройствми). Стандарты безопасности, которые уже применяют к роботам, включают ISO13482; другие релевантные стандарты - это те, которые применяются домашним электроприборам и радиопередающему оборудованию.
Более практичными, нежели шагающие роботы, являются роботы на колесных платформах, оборудованные 3D-камерами и системами определения дальности, как описано выше. Другое направление - это "носимые роботы", такие как гарнитура Meta, CloudMind, которые обеспечивают сложное визуальное распознавание, SLAM и индикация направления с использованием вибрации.
4.2 Поддержка мобильной сети
Обзор 5G
5G - это очередное поколение мобильной сотовой связи. Как ожидается, строительство таких сетей начнется с конца этого десятилетия и получит массовое распространение в двадцатые годы. Ключевая особенность 5G - это пиковые скорости выше 10 Гбит/c, 1 млн подключений на квадратный километр и задержка распространения сигналов менее 1 мс. Три основных сценария развития 5G: eMBB (улучшенное широковещение); mMTC (множественная связь машина-машина) и URLLC (ультра-надежная связь с малыми задержками).
Для реализации этих трех сценариев был разработан концепт слайсинга сети. Как ожидается, это улучшит работу сетей связи. Этот концепт состоит из создания различных вариантов реализации сетевых технологий, подходящих для различных приложений с различными требованиями. Такие, например, как парадигма динамичной и гибкой сети связи, что реализуется на базе облачной сетевой инфраструктуры, программно формируемых сетей (SDN) и виртуализации сетевых функций (NFV).
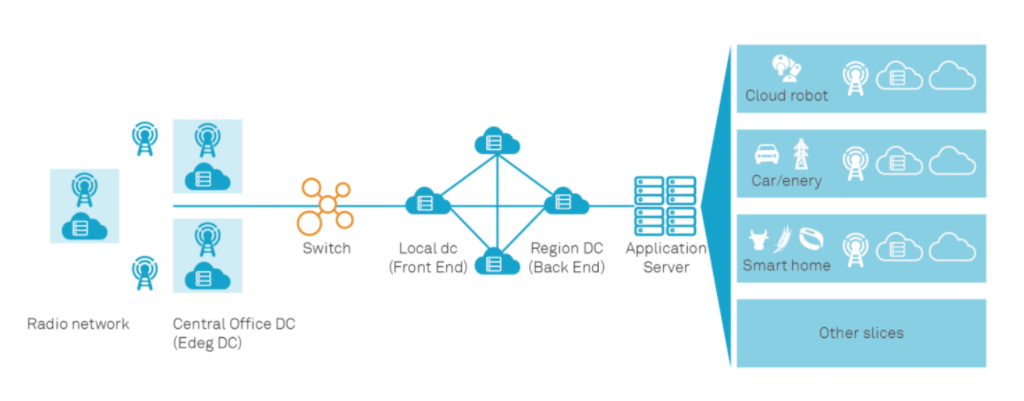
Рис.16. Облачная архитектура 5G для поддержки различных приложений. Источник: Huawei X Labs.
5G будет отвечать сетевым требованиям облачной робототехники
В облачной робототехнике требуется четыре типа базового подключения:
- мониторинг и сообщения о статусе - робот загружает данные о своем статусе в облачный "мозг"
- управление в реальном времени - критичные для выполнения задачи управляющие сигнаы, которые сообщают роботу, что ему делать
- процессинг видео и голоса - с использованием мощных облачных ресурсов, чтобы помочь роботу понимать окружающую среду и взаимодействовать с пользователями
- загрузка ПО и сервисных данных - апдейты ПО робота, загрузка пользовательского контента или образовательных материалов. В таблице 17 показаны требования к типам таких подключений.
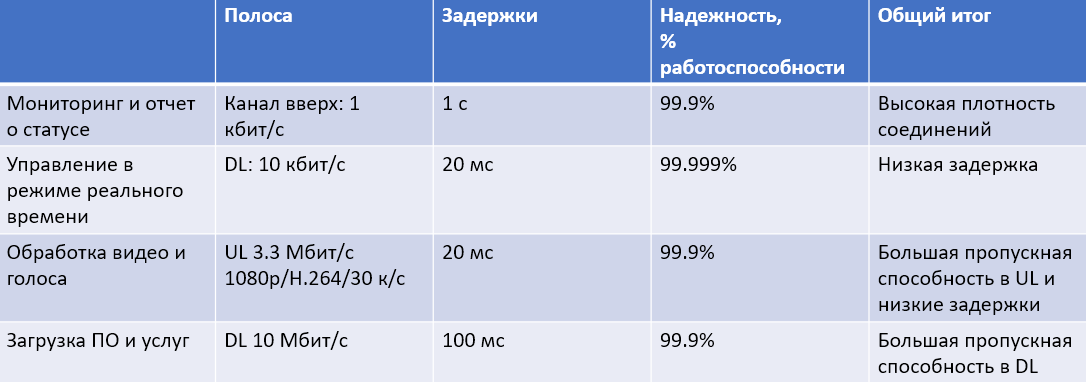
Таб.17. Анализ требований к сетевому подключению робота; Источник: Huawei X Labs
На рис. 18 показаны требования к сети полностью облачных версий различных существующих роботов. Существующие сети не в полной мере отвечают спецификациям ряда приложений для роботов, а вот в сетях 5G с их широкой полосой пропускания, низкой задержкой и высокой надежностью, можно ожидать надежную поддержку различных робототехнических приложений.

Рис.18 Сетевые требования для приложений облачных роботов; источник: Huawei X Labs.
Слайсинг в сети 5G и мобильные облачные вычисления хорошо подходят для приложений облачной робототехники
Сетевой слайсинг, характеристики которого могут значительно отличаться, может соответствовать требованиям, предъявляемым облачной роботоехникой, удовлетворять требованиям к потребляемой мощности на стороне робота, а также обеспечивать приемлемый роуминг. С использованием слайсинга, сети 5G также отвечают требованиям к ширине полосы пропускания, задержки и безопасности.
Облачные вычисления (MEC - mobile edge computing) обеспечивают необходимые ресурсы для сетевых и других вычислений и объемов памяти, расположенных там, где это удобно, чтобы отвечать требованиям приложений облачной роботехники. Чем ближе к пользователю расположены сетевые ресурсы, тем сильнее снижается задержка в сети. Решение MEC может реализовываться на сервере MEC, который служит гейтом или на базовой станции сети сотовой связи, обеспечивая локальный кэш для контента, оптимизацию использования сети беспроводной связи, перенаправление местного контента и наращивания возможностей сети. Безопасность также возрастает, поскольку больший объем данных обрабатывается в непосредственной близости от пользователя и не попадает в ядро сети. Для облачной робототехники, чем ближе к пользователю можно развернуть ресурсы ИИ, тем ниже задержка. Программное управление виртуализированными ресурсами сети обеспечит возможность достижения оптимального баланса между использованием централизованных облачных ресурсов и использованием более локальных "краевых" ресурсов, в зависимости от требований к задержкам.
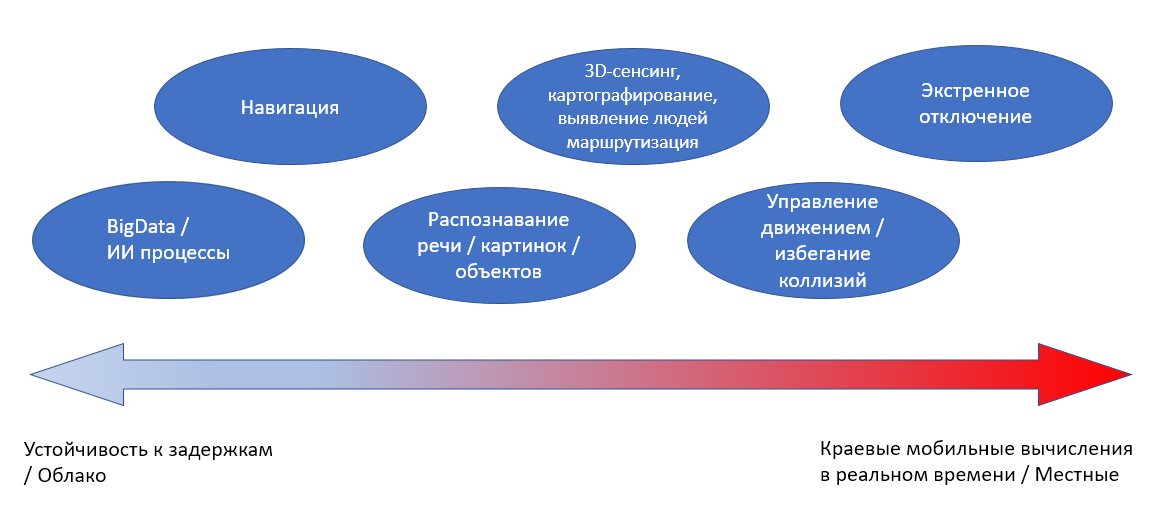
Рис. 19 Внедрение облачной поддержки функционала облачных роботов, исходя из требований по задержке.
4.3 Обеспечение ИИ - доставка облачного ИИ и Машинное обучение
ИИ, машинное обучение и глубокое обучение
Добавляя мощь облачных вычислений к робототехнике, получают возможность применения технологий ИИ, машинного обучения (ML) и глубокого обучения (DL) для реализации целого ряда новых приложений, существенно расширяющих возможности роботов, их интеллектуальный уровень. Это будет оказывать воздействие на несколько отраслей, от обеспечения безопасности до производства. Определения ИИ, ML и DL отличаются формулировками, но в этом документе мы будем рассматривать следующие:
ИИ - это компьютерная система, способная справляться с задачами, которые обычно требуют использования умственных способностей человека (включая визуальное распознавание, распознавание речи, принятие решений и перевод).
ML - Машинное обучение, это использование алгоритмов и методов, таких как деревья решений, нейросети и решения на основе примеров для улучшения функционирования за счет тренировок.
DL - Глубокое обучение относится к использованию многослойных искусственных нейронных сетей, которые можно тренировать на большом объеме примеров, получая в результате высокий уровень правильных решений.
Эти концепты позволяют роботам иметь возможность обучения решению той или иной задачи и совершенствоваться в ее решении, а не просто выполнять действия, предприсанные программным кодом управляющей системы. Алгоримты машинного обучения различного типа помогают компьютерам интерпретировать данные и принимать решения, основанные на данных. Их можно тренировать пониманию того, какие из принимаемаемых ими решений были верными или неверными, с тем, чтобы решения со временем улучшались.
Используя машинное или глубокое обучение, робот может стать более способным к выполнению задачи, или сможет освоить решение новой задачи за счет улучшенного понимания условий внешней среды и контекста задачи. Эти подходы к тому же позволяют сократить необходиомость (и стоимость) программирования робота для решения каждой новой задачи. Это, в свою очередь открывает перспективы для создания более гибких промышленных роботов, которые способны справиться с изменениями в конфигруации промышленного производства и все более укорачивающимися производственными циклами. Они способны оптимизировать процессы, в которых они задействованы. При использовании вне условий производства, ИИ и ML позволяют интерпретировать изображения и речь в информацию, на которую робот способен адекватно реагировать. Доступ к вычислительным мощностям, которые требуются для ML и DL, существенно улучшается за счет использования высокоскоростных сетей связи и использования облачных ресурсов.
Ключевые зоны, где могут применяться эти технологии в облачной робототехнике - это интеллектуальная видеообработка в задачах распознавания местности и автономной навигации, распозновании лиц, а также в обработке естественной речи. Это требует вычислительных мощностей, превышающих те, что могут быть установлены локально, на роботе.
Доступ к вычислительным мощностям, которые требуются для машинного и глубокого обучения существенно улучшается за счет использования высокоскоростных сетей и использования облачных ресурсов.
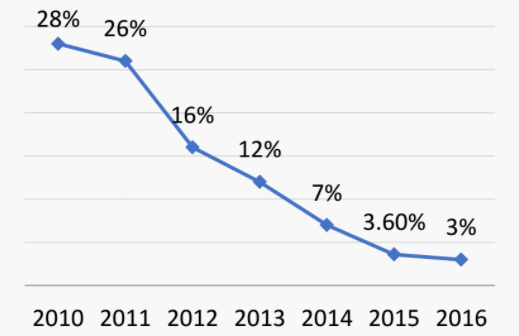
Рис.20 Динамика показателя "Ошибки распознавания класса объекта", %, по данным ILSVRC (ImageNet Large Scale Visual Recognition Shallenge). Источник: ImageNet
Благодаря существенному росту вычислительных мощностей и постоянному улучшению алгоритмов, технологии ИИ быстро прогрессируют. В качестве примера, можно рассматривать динамику снижения доли ошибочных распознаваний класса объектов в рамках ежегодных соревнований ImageNet. Ошибки при распознавании снизились уже до уровня менее 3%. Стоит отметить, что качество распознавания все еще не достигло уровня в 100%, что желательно для таких приложений, как автономные автомобили.
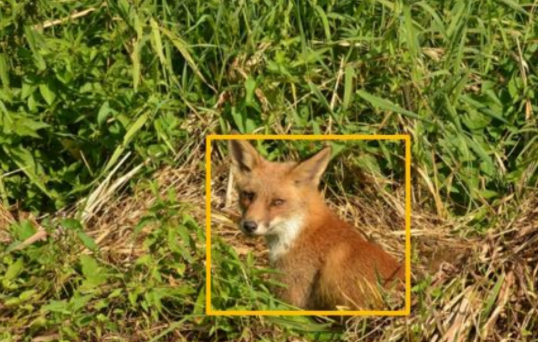
Рис. 21. Классификация объекта
В рамках соревнований ImageNet2015, NVIDIA и IBM представили участникам облачное GPU (на базе NVIDIA K80), демонстрируя осуществимость облачного ИИ.
От стека технологий BigData к стеку технологий ИИ
Глубокое обучение появилось, как лучший способ проведения анализа изображений, в приложениях, таких, как анализ рентгеновских снимков, а также в приложениях, требующих минимальной задержки при обработке изображений, например, для удаления видеостримов, нарушающих правила размещения площадки. Самые большие ИТ-компании, такие как Baidu, Google и Facebook создали специализированную инфраструктуру для обработки пользовательских сценариев с использованием ИИ, но многие компании не располагают собственной экспертизой или ресурсами, необходимыми для использования новых технологий. Требуется новая back-end инфраструктура, и ее можно построить, с использованием новых чипов, таких, как GPU (процессоров графики). Проблема в том, что такие технологии требуют больших процессорных мощностей, процесс запуска таких технологий в практическое использование не является простым, и директор по информации должен быть знакомым с этими новыми трендами.
В настоящее время IT-инфраструктура компаний разработана с упором на использование отказоустойчивых, бюджетных хранилищ, которые позовляют легко наращивать ресурсные кластеры и смягчать отказы оборудования. Реализация ИИ требует хорошего понимания ПО для BigData с тем, чтобы знать, как распределять вычислительную нагрузку с тем, чтобы извлекать преимущества, обеспечиваемые новыми акселераторами. Стеки BigData должны быть модифицированы до превращения в стеки ИИ, которые позволят предприятиям извелкать больше ценности из данных, собираемых сенсорами роботов.
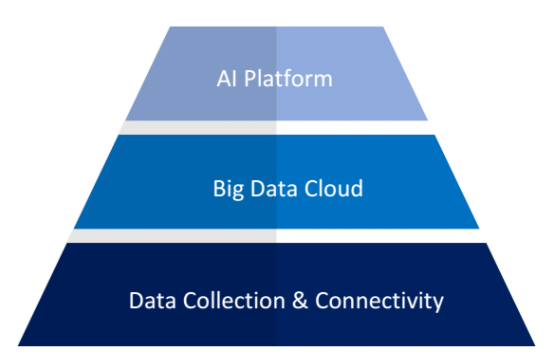
Рис.22 Стек ИИ (Источник: рабочая группа облачной робототехники GTI)
- Внедрение облачного ИИ требует: очень больших объемов хранения информации и вычислительных мощностей, а также инвестиций в развитие ПО, API, а также библиотек с открытым кодом. Железо требует перехода с CPU на GPU или даже на специальные процессоры под ИИ.
- Роботы требуют больших облачных хранилищ для сохранения данных. Есть больший, чем ранее спрос на безопасность, анонимность и распределенную емкость.
- Сотни миллионов подключенных сенсоров потребуются для сбора обучающий ИИ данных
Низкая задержка распространения сигнала критична для пользовательского опыта при взаимодействии с роботами
100 мс
Задержки распространения сигнала в нейронной сети человека составляют около 100 мс и если робот способен реагировать в пределах такого времени, то в общении с ним люди не ощущают задержек. Чтобы достичь такого времени реакции, требуется чтобы захват видео, кодирование, передача по сети, облачное декодирование и визуальные эффекты ИИ выполняются по принципу "чем быстрее, тем лучше". В прошлом задержка машинного зрения составляла более 200 мс; по мере наращивания вычислительных мощностей, в ближайшие год-два, ожидается сокращение задержки до 80-100 мс.
Прогноз размера рынка ИИ
$36.8 млрд
Согласно оценкам Tractica, рынок ИИ будет расти с $643,65 млн в 2016 году до $36.8 млрд в 2025 году; глядя на эти цифры становится понятно, почему такие технологические гиганты как Google внедряют такие стратегии, как "AI first" (ИИ прежде всего).
Благодаря переходу к сетям 5G, как ожидается, полная задержка реакции не превысит 20 мс или будет меньшей, что позволит достигнуть отклика роботов при человеко-машинном взаимодействии, ощущаемого, как "мгновенный".
5. Бизнес-модели облачной робототехники
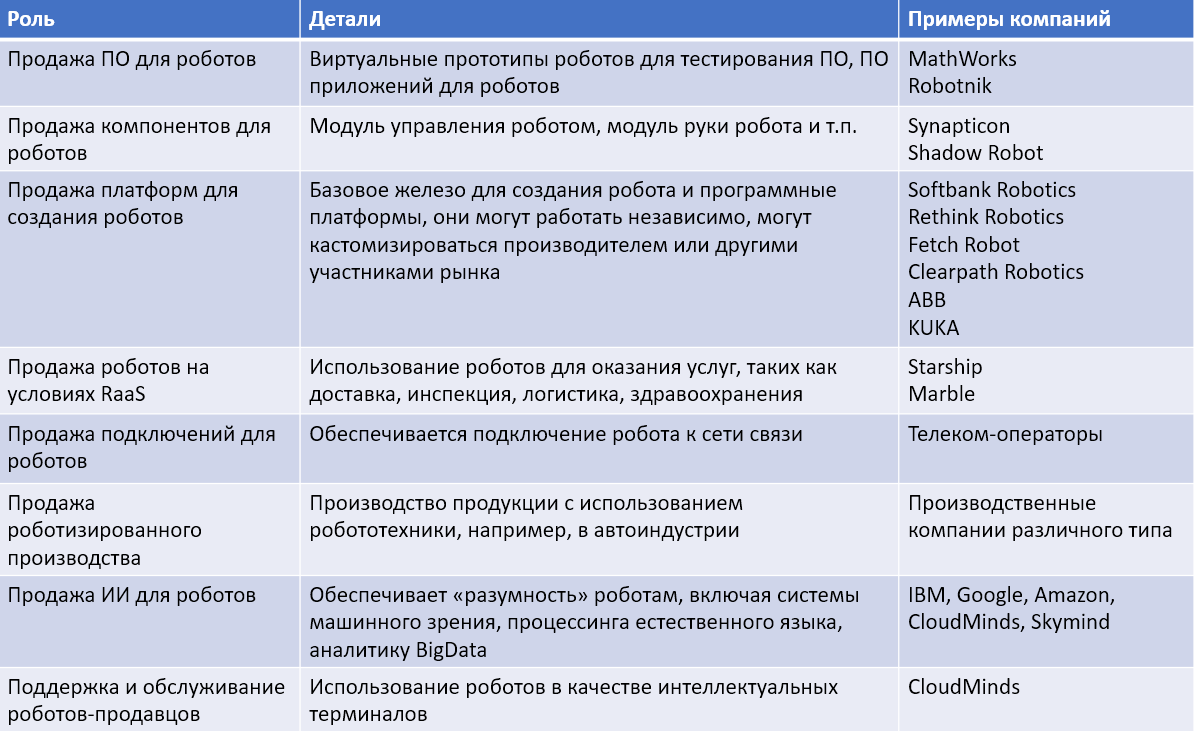
Табл. 23. Бизнес-модели участников рынка облачной робототехники; источник: рабочая группа облачной робототехники GTI
Роль телеком-операторов в облачной робототехнике
Телеком-операторы могут обеспечивать роботов широкой полосой пропускания, высокой надежностью и низким уровнем задержек в сети, что отвечает потребностям облачной робототехники. Операторы в будущем смогут делать еще больше, например, открывать сетевые возможности роботам, предоставляя услуги защиты данных, поступающих от роботов и управлением ими, а также обеспечивая центры BigData для систем ИИ: операторы могут обеспечить комплексные услуги и достичь долговременного роста доходов.
6. Выводы
Рынок робототехники стоит на пороге существенных изменений. Кроме традицонных промышленных роботов, появится огромное разнообразие разнообразных роботов, способных решать самые разные задачи. Эти новые роботы будут использовать облачные ресурсы для того, чтобы стать "более умными". Эти ресурсы будут включать ИИ, ML и DL, обеспечивающие распознавание образов и лиц, а также обработку естественного языка. Сенсоры и актуаторы роботов не претерпят существенных изменений, эти технологии уже являются зрелыми.
Разработана новая архитектура для управления и контроля за облачными роботами, которая отделяет функциональности, которые следует выполнять на платформе роботов от тех, которые лучше выполнять в облаке, к которому подключен робот.
Роботы будут подключаться к облаку с использованием бытрых и безопасных сетей сысокой надежностью и низким уровнем задержки. Эти сети, особеннно новые мобильные сети 5G, которые будут построены в ближашие несколько лет, стоятся по архитектуре, которая способна поддерживать различные типы связи одновременно, включая ультра-низкую задержку или очень широкую полосу пропускания. Они могут это делать с использованием программного сетевого слайсинга, что позволяет добиваться от сети хаарактеристик, отвечающих требованиям пользователя. Низкая задержка даже для наиболее требовательных к ресурсам приложений робота может быть обеспечена за счет нового дизайна сети и за счет расположения вычислительных ресурсов в наиболее подходящих для этого точках, например, на краях сети, поблизости от пользователя.
По мере внедрения таких технлогий, ожиадется взрывной рост пользования облачными роботами бизнесов всех типов, а также в домашних условиях. Логистические роботы получат больше возможностей, в том числе, они смогут работать за пределами существующих ограничений. Появятся облачные роботы, обеспечивающий функциональности безаопасности и наблюдения, обеспечивающие гайдинг людей в больших зданиях и предоставляющие информацию в ответ на запросы на естественном языке в магазинах, музеях и аэропортах. Появится выбор домшних роботов, предназначенных для помощи человеку в образовании или для использования в качестве компаньонов или сиделок, а также для развлекательных целей. Наш образ жизни и работа изменятся по мере совершентствования роботов, которые получат облачные вычисления, ИИ и подключение к сетям 5G.
7. Ссылки
Есть несколько наборов стандартов, которые относятся к облачной робототехнике. Наиболее важные из них:
- ISO 8373:2012: Роботы и робототехнические устройства - словарь (Robots and robotics devices - vocabulary) ()
- ISO 13482:2014 Роботы и робототехнические устройства - требования к безопасности для роботов для оказания услуг персональной заботы (Robots and robotic devices - safety requirements for personal care robots) ()
- JIS B0187 Словарь сервисного робота (Service robot vocabulary) ()
Ссылки, относящиеся к данному документу приведены ниже:
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
+ +









