
Робототехника: Безободное колесо - решение для мобильной робототехники
10.06.2019Поиски разработчиков из компании Тетработ эффективного шагающего механизма для передвижения наземных роботов привели к изобретению безободного колеса. Но прежде чем найти новое решение инженеры компании проанализировали все существующие типы сухопутных движителей – от различных колес, гусениц и колесно-шаговых движителей до всевозможных шагоходов и биоподобных механизмов. Задача заключалась в том, чтобы найти или создать максимально универсальный движитель, на котором мобильный робот смог бы быстро преодолевать препятствия, перемещаться по лестницам и при этом имел высокий кпд и компактные размеры.
Колесное шасси безусловный фаворит, когда необходимо перемещаться по ровной и твердой поверхности.
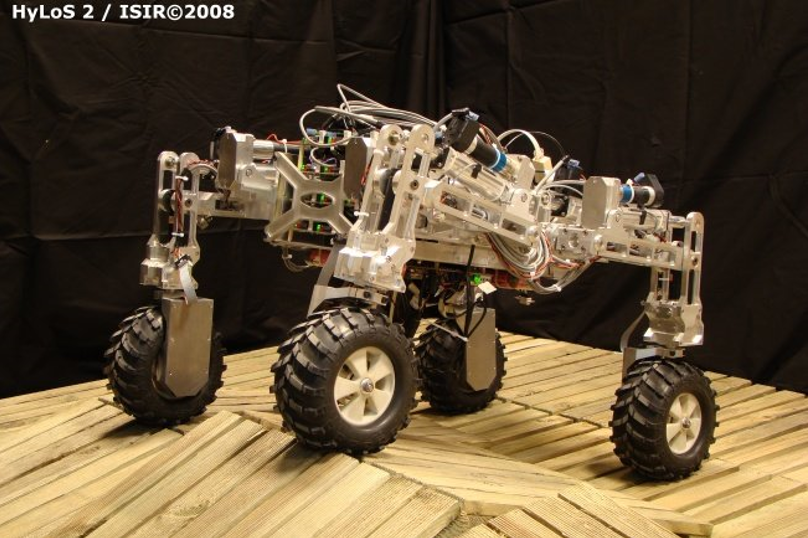
робот Hylos II; источник фото: .
При движении по пересеченной и зыбкой местности энергозатраты резко возрастают, так как колесо прокладывает сплошную колею, тратит больше энергии на смятие грунта и не может преодолеть даже относительно невысокие препятствия. Огромные колеса не рассматривались в силу неприемлимых размеров и большого веса. Примерно те же недостатки у гусениц – большой размер и вес. Кроме того, в гусеничном движителе часть энергии теряется на внутреннем трении гусеницы, трении об катки, также есть потери при маневрировании, так как при поворотах гусеницы вынуждены проворачиваться всей опорной поверхностью, что вдобавок приводит к быстрому износу траков.
Различные шагоходы, построенные по принципу неадаптивного перемещения ног на основе циклических механизмов имеют свои плюсы и недостатки. На сегодня известно несколько таких механизмов, в частности стопоход Чебышёва, механизм Кланна, Тео Янсена, Хойкена и другие.
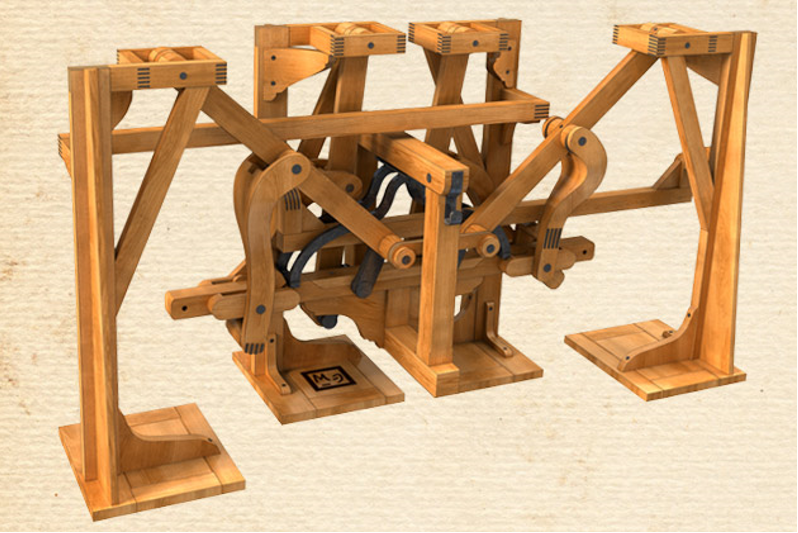
Стопоход Чебышева в Музее истории Санкт-Петербургского университета. Источник иллюстрации:
"Ходящий как краб" механизм. Источник фото:
Из плюсов – высокая проходимость по зыбкой местности, не оставляют сплошную колею. Недостатки – многозвенность выливается в громоздкость конструкций, низкую скорость, проблемы с маневренностью.
Биоподобные шагающие конструкции. Наиболее яркие представители – big dog, spot mini, ANYmal и прочие аналоги.

Биоподобная шагающая конструкция. Источник фото: Robotic Systems Lab,
Отлично маневрируют, обладают повышенной адаптивностью к неровностям дороги. Но и у них есть свои недостатки. Высокие энергозатраты – множество сервоприводов, сенсоров и нейрочипов потребляют массу драгоценной энергии. Подъем и опускание ног также съедают энергию поскольку рекуперация энергии при опускании ног в данных конструкциях неэффективна. А маятниковые движения ног и необходимость постоянного анализа местности снижают скорость передвижения. Кроме того немаловажным фактором является высокая стоимость подобных роботов и отсутствие проверенных решений на рынке.
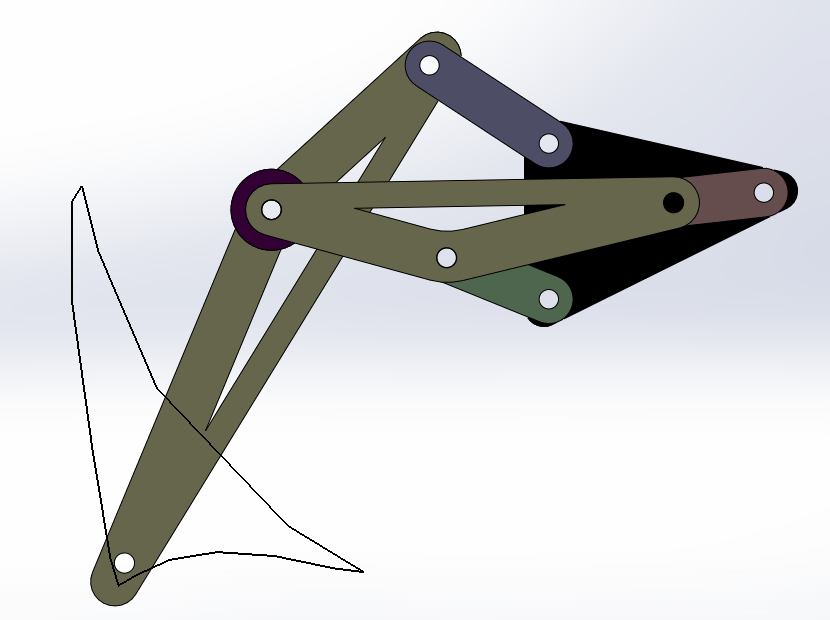
Наиболее близкие к ожидаемым результаты давали колесно-шаговые движители, так они сочетают в себе плюсы колес и ног.
Колеса – высокий кпд и скорость, ноги – отсутствие сплошной колеи и возможность перешагивать препятствия. Однако, как было сказано выше, основная болезнь колесно-шаговых движителей – колебания и толчки, возникающие в процессе движения. Причем паразитные колебания проявляются не только по вертикали, но и влияют на скорости опорных точек.
Шагающее колесо Magformers. Источник фото:
Так для простой треноги колебания оси по вертикали достигают 50% от длины ног, а колебания скорости опорных точек – 30%.
И если для небольших роботов данные колебания можно игнорировать за счет малого веса робота и гибких сочленений, то для более крупных и мощных собратьев колебания превращаются в разрушительные для конструкции, двигателей и механизмов робота. А если это робот-курьер, то и для переносимых грузов.
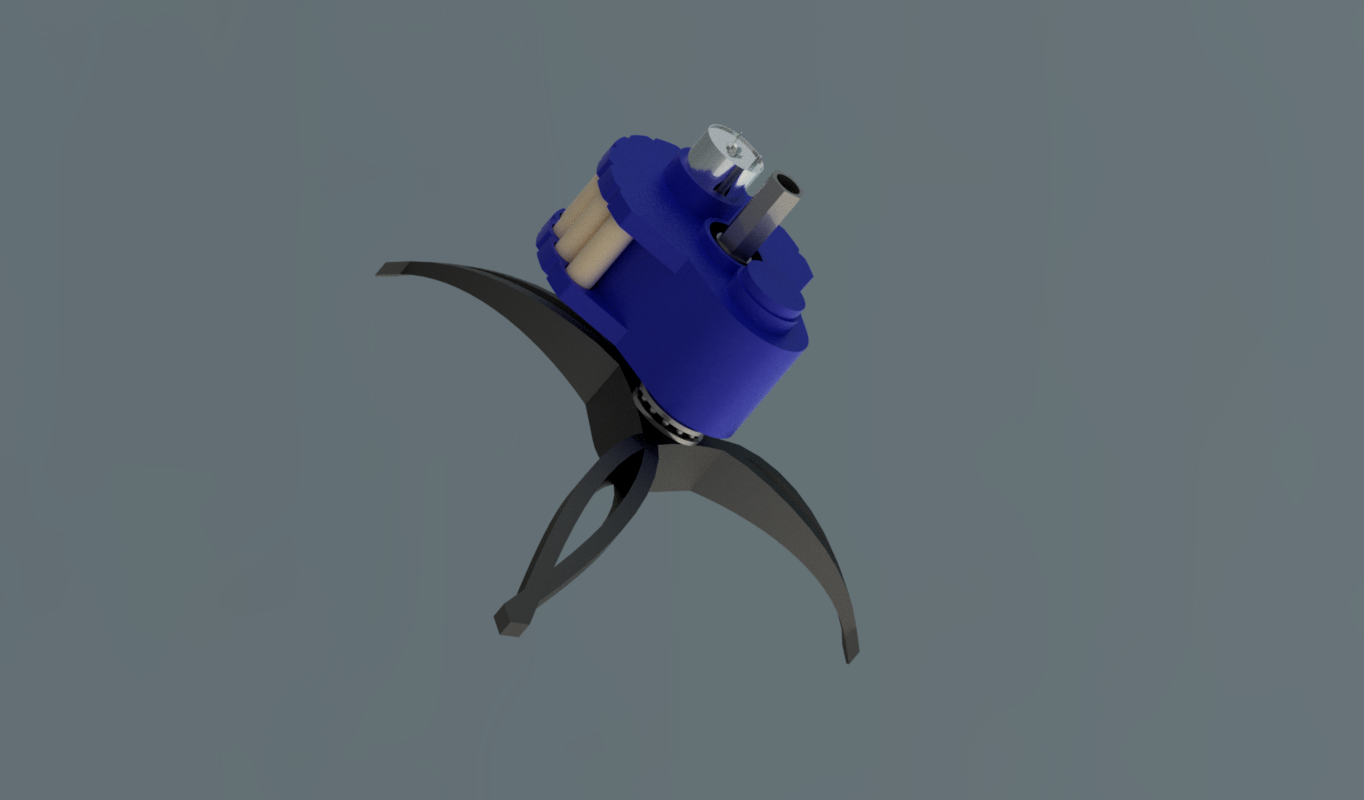
Поэтому основной упор нами был сделан на разработке механизма колесно-шагового движителя с компенсатором паразитных колебаний. В итоге, после нескольких месяцев поиска, решение было найдено. Благодаря оригинальному компактному компенсатору колебаний проблему удалось решить. Оптимальные параметры механизма уменьшили колебания по вертикали до 5%, а колебания скорости опорных точек до 6,5%. Для перемещения по неровной поверхности эти остаточные колебания практически незаметны.
Высокий кпд безободного колеса достигается за счет подшипников и сбалансированности конструкции - энергия не затрачивается на подъем ног. Безободное колесо позволяет эффективно перемещаться по пересеченной местности на электрической тяге небольшой мощности.
Еще одна идея, реализованная в конструкции безободного колеса - наклонное расположение оси и ног, относительно оси. Наклон увеличивает клиренс и позволяет спрятать ноги под корпус чтобы не задевать людей и предметы. Безободное колесо представлено в виде готового шагающего модуля со встроенным компенсатором колебаний, мотором и батареей аккумуляторов, спрятанных в кожух.
Ходовые модули крепятся к корпусу робота или транспортного средства. Возможны самые разнообразные способы их соединения - на видео показаны три варианта с двумя, четырьмя и шестью ходовыми модулями. Увеличение ходовых модулей с шести и более сопряжено с проблемой создания интеллектульной системы управления, способной автономно управлять работой каждого модуля и иных узлов, задействованных в конструкции робота.
Наш проект находится в стадии активного роста. Приглашаем к участию в проекте энтузиастов, увлеченных робототехникой и инвесторов.
Сайт проекта:
+
За новостями робототехники и ИИ удобно следить в - основные новости; телеграм-трансляции, посвященных робототехнике, больше новостей - в телеграм-канале - подпишитесь прямо сейчас.









