
Робототехника: IHMC - уверенная поступь прогресса
08.07.2019Обучить гуманоидного робота прогулкам по ровным поверхностям весьма и весьма непросто - что уж говорить о движении по пересеченной местности. В этой области интересны, например, разработки спецов из Института человеческого и машинного восприятия Флориды. Отметим, что роботы IHMC занимали первое и второе места в соревнованиях, проводимых DARPA в 2013 (первое место в Virtual Robotics Challenge и второе место в DRC) и в 2015 (второе место и $1 млн в DARPA Robotics Challenge) годах.
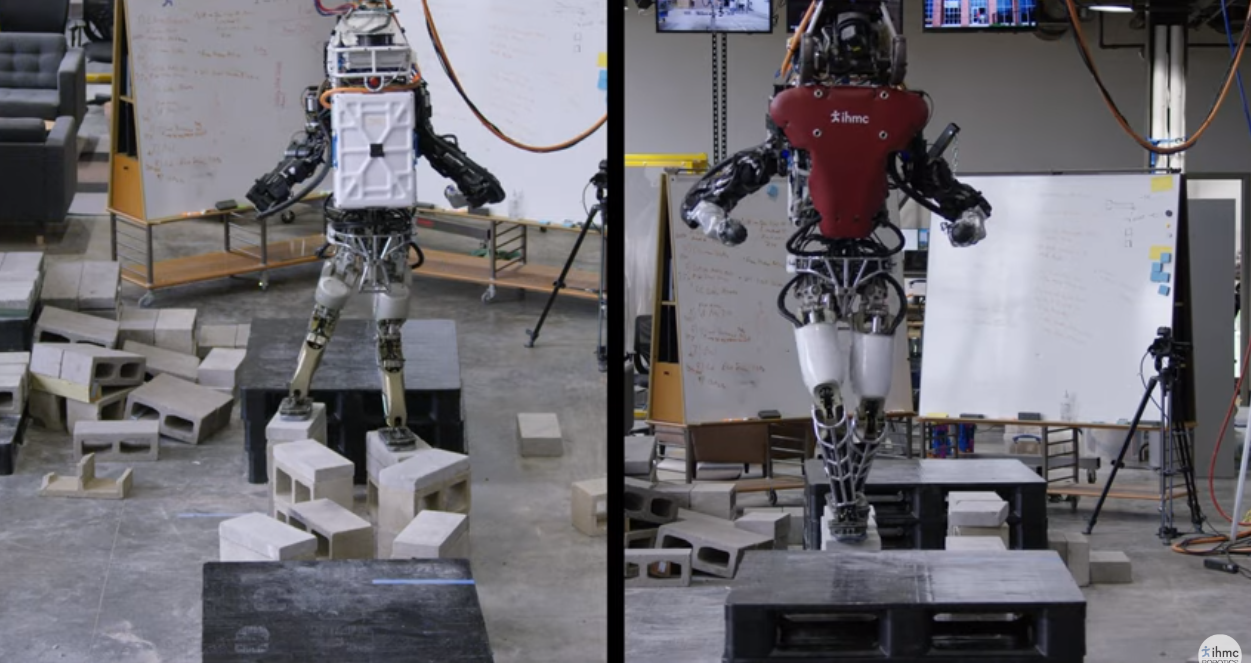
IHMC опубликовали ролик, демонстрирующий работу ПО на роботах Boston Dynamics (Atlas) и NASA (Valkyrie). Гуманоидные машины уверенно ступают по россыпям шлакоблоков и узким “тропкам”, состоящим из разрозненных объектов.
Навигация строится следующим образом: ПО определяет начальную и конечную точки движения робота, а затем пошагово размечают все возможные траектории движения. Далее роботы оценивают варианты и выбирают оптимальный маршрут - звучит сложно и неэффективно, однако весь цикл прокручивается достаточно быстро.
Роботы довольно “умны” и могут поменять маршрут, обнаружив на нем преграду, которой не было до начала подсчетов. Машины чувствуют себя настолько уверенно “на своих двоих”, что могут перемещаться даже по узким путям (например, маршрутам, выложенным из единичных шлакоблоков).
Точность движения по узким путям составляет порядка 50%, тогда как на пересеченной местности эта цифра достигает 90%. Роботы практически не испытывают затруднений, перемещаясь по ровному месту.
Источник: ; фото:
+
За новостями робототехники, ИИ, а также за трендами в этих областях удобно следить в . Еще больше информации о роботах в телегам канале .









