
Новозеландская Boxfish Robotics показывает AUV Boxfish и ROV ARV-i на выставке OCEANS 2025 Great Lakes в Чикаго
02.10.2025Новозеландская Boxfish Robotics показывает AUV Boxfish и ROV ARV-i на выставке OCEANS 2025 Great Lakes в Чикаго
Boxfish AUV
Выполненная по схеме ROV, но при этом автономная платформа, предназначенная для исследования подводных сообществ, мониторинга рыб, кораллов и фотограмметрии.

Аппарат предназначен для автономного мониторинга и климатических исследований, а также исследований распространения инвазивных видов и утраты сред обитания.
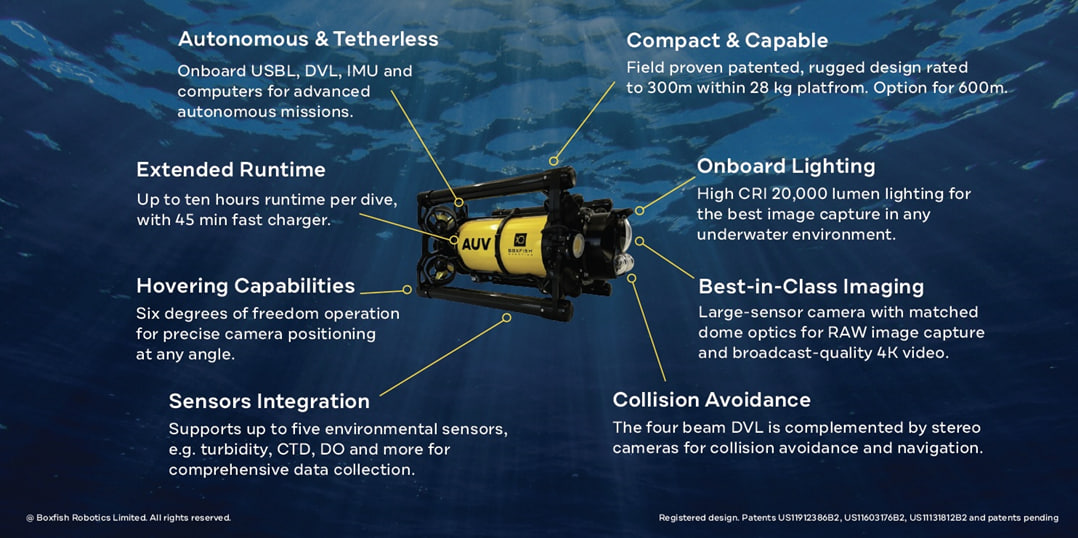
Скелет из анодированного алюминия, акриловые части, 8 движителей, обеспечивающих широкие возможности маневрирования (6 степеней свободы), устойчивость к выходу из строя движителя, дальнодействие – до 6 км от точки запуска, глубины – до 300 м или до 600 м. Рабочие температуры – от минус 10 до плюс 45. Время под водой – до 10 часов, Li-Pol 600 Вт, быстрая зарядка за 45 минут, медленная – 5 часов. Освещение 20 тыс люмен, «высокий CRI», регулировка яркости. Размеры: 730 x 435 x 351 мм, 25 кг.
Приборы: сенсор глубины, IMU, датчики давления, температуры, влажности, напряжения, течи, сбоя движителей, USBL, DVL. Есть набор стандартных портов и разъемов. Гидролокатор Oculus Imaging sonar.
Сенсоры среды: miniCTD, ph, взвесей, хлорофилла, флуоресценции, гидрофон.
Опционально может управляться по кабель-тросу 2.7 мм.
- Видео на Vimeo:
ROV ARV-i
ROV ARV-i предназначен для долгосрочного пребывания на дне моря или озера, мониторинга и выполнения задач – как запланированных ранее, так и “по требованию”. Дрон работает с беспроводной док-станцией.

Скелет из анодированного алюминия, акриловые части, 8 движителей, обеспечивающих широкие возможности маневрирования (6 степеней свободы), устойчивость к выходу из строя движителя, дальнодействие – до 6 км, глубины – до 300 м и до 600 м. Рабочие температуры – от минус 10 до плюс 45. Время под водой – до 10 часов, Li-Pol 600 Вт. Может беспроводно заряжаться под водой от док-станции. Док станция может получать питание от буя с солнечной батареей (опция). Освещение 2х10 тысяч люмен, «высокий CRI», регулировка яркости. (Опционально – «задний свет»).
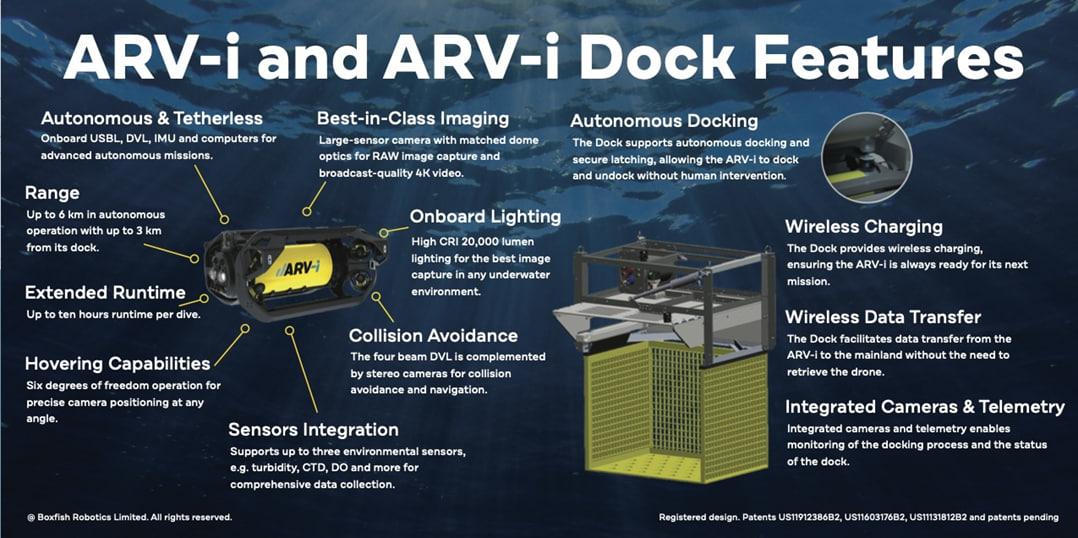
Размеры: 750 мм х 645 мм х 340 мм, 28 кг.
Датчики: сенсор глубины, IMU, компасс, давления внутри, температура, влажность, напряжение, датчик течи, датчики сбоя движителей, USBL, DVL. Есть набор 3 стандартных портов и разъемов, включая RS485, RS422, RS232 и Ethernet. Гидролокатор Oculus Imaging sonar.
Сенсоры среды: miniCTD, pH, взвесей, хлорофилла, флуоресценции, DO, гидрофон.
- Видео на Vimeo:
Аппарат Luna ROV от Boxfish Robotics уже использовался в районе Великих озёр во время съемок фильма “All Too Clear: Beneath the Surface of the Great Lakes”.
Выводы
Казалось бы, ну еще один AUV и еще один ROV от малоизвестной (редакции SeaRobotics) компании, из страны, которая не является законодателем мод в морской робототехнике. Почему о них стоит упомянуть?
Аппараты Boxfish отличаются от ряда других моделей тем, что предназначен прежде всего для высококачественной фото- и видеосъемки под водой, причем с поддержкой компьютерного зрения. Для этого аппараты оснащены камерами Sony 4K в качестве основной и двумя дополнительными камерами, используемые для получения стереоизображения системой машинного зрения. Boxfish Robotics переносит свой успешный опыт в создании камер для кинематографических ROV (таких как Luna ROV) в область автономных аппаратов. Но это не просто "подводная камера", аппарат оснащен приличным набором сенсоров, который ставит его где-то между "киношным" и "научным" аппаратом.
ROV ARV-i создан с поддержкой концепции резидентного базирования. Аппарат может находиться под водой в течение нескольких месяцев, автономно возвращаясь на док-станцию для подзарядки батарей и передачи собранных данных, что устраняет необходимость использования судна сопровождения для его подъема на поверхность и может сокращать эксплуатационные расходы. Этот подход несколько померк после появления гибридных автономных систем из USV и ROV/AUV, но в каких-то случаях, вероятно, все равно будет востребован.
Стоит обратить внимание на эти трендовые аппараты? Например, в качестве идей "на заметку".
фото и картинки - компании Boxfish Robotics
- -









