
Компания Boxfish Robotics рассказала об автономном исследовании, проведенным в проливе Рангитото с использованием HAUV
16.02.2026Компания Boxfish Robotics подробно описывает использование своей технологии «парящих» автономных подводных аппаратов (HAUV) для проведения повторяющихся трансектов морского дна в целях экологического мониторинга в проливе Рангитото в порту Окленда, Новая Зеландия.

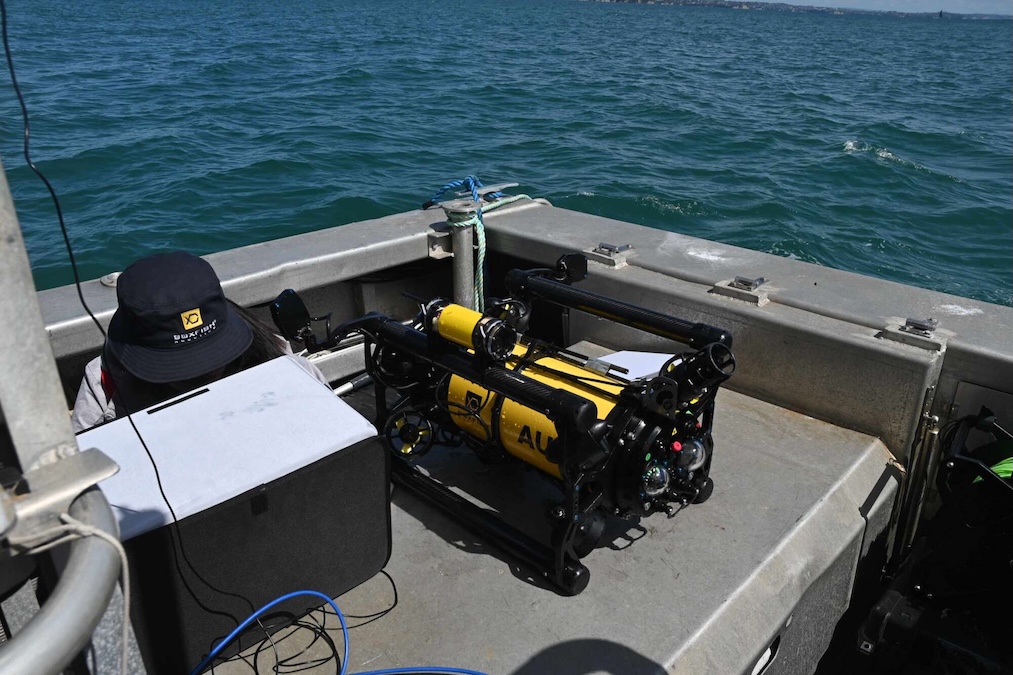
Миссия была спланирована заранее и выполнена без кабель-троса и пилота, аппарат работал под управлением бортовой навигационной системы. Подводный аппарат запускался и поднимался с небольшого судна командой из двух человек и поддерживал постоянную высоту, тангаж и скорость обследования, одновременно собирая непрерывные видеоданные и данные о местоположении.
В результате был получен высококачественный видеоматериал, снятый на морском дне, со стабильной кадрировкой, равномерным освещением и четкими отдельными кадрами. Поддержание постоянной высоты обеспечило равномерный масштаб и перспективу по всему участку, уменьшив изменчивость, часто наблюдаемую в видеоматериалах, снятых буксируемыми камерами. Отдельные кадры подходили для детального анализа и документирования, поддерживая как качественную, так и количественную интерпретацию.
Данные о широте и долготе регистрировались непрерывно с интервалом в одну секунду, обеспечивая прямую пространственную привязку изображений. Система также использует RTK GPS, что повышает абсолютную точность позиционирования и позволяет проводить повторяемые обследования с использованием трансектов в течение длительного времени.
Консультант Пол Кеннеди отметил, что аппарат "точно следовал запланированным путям, чего трудно достичь с обычными ТНПА на кабель-тросе", а сооснователь Boxfish Крейг Андерсон подчеркнул: "Автономные трансекты позволяют командам сосредоточиться на интерпретации данных, а не на управлении аппаратом".
Высокая точность позиционирования достигается гибридной навигационной системой: ультракороткобазисная акустическая система (USBL) работает в связке с доплеровским лагом (DVL), инерциальным измерительным блоком (IMU) и датчиком глубины. Алгоритмы слияния данных компенсируют ограничения каждого сенсора, обеспечивая сантиметровую точность даже в условиях отсутствия GPS под водой.
Основные характеристики аппарата
- Модель: Boxfish AUV (HAUV)
- Рабочие глубины: до 300 м (есть версия 600 м)
- Время работы: до 10 часов
- Дальнодействие: до 6 км на одном заряде
- Вес: 25 кг (с балластом)
- Габариты: 730 х 435 х 351 мм
- Движители: 8 векторных, 3D-расположение, 6 степеней свободы
- Камера: Sony 20 мп, 4К видео, стереокамеры для навигации
- Освещение: 17000 – 20000 люмен, CRI > 90
- Навигация: USBL, IMU, DVL, датчик глубины, RTK GPS, опционально – многолучевый гидролокатор
- ПО миссии: Boxfish SafePath Planner
Миссия в канале Рангитото демонстрирует смену парадигмы: автономные аппараты позволяют портовым службам и экологическим ведомствам проводить частые, повторяемые съёмки без привлечения специализированных судов и водолазов, сохраняя полный контроль над графиком и качеством данных.
Что дальше. Успешная миссия в Новой Зеландии — часть более широкой стратегии. Boxfish уже представила резидентную систему ARV-i, которая способна месяцами находиться на подводной док-станции, автономно выходить на задания по расписанию и возвращаться для беспроводной зарядки и автоматической выгрузки данных. Это открывает путь к непрерывному, недорогому и полностью автоматизированному мониторингу океана.
по материалам Ocean Science & Technology, фото - источника
- -









