
Forssea Robotics и Exail завершили интеграцию гибридного ROV Argos X и «океанического» USV DriX O-16
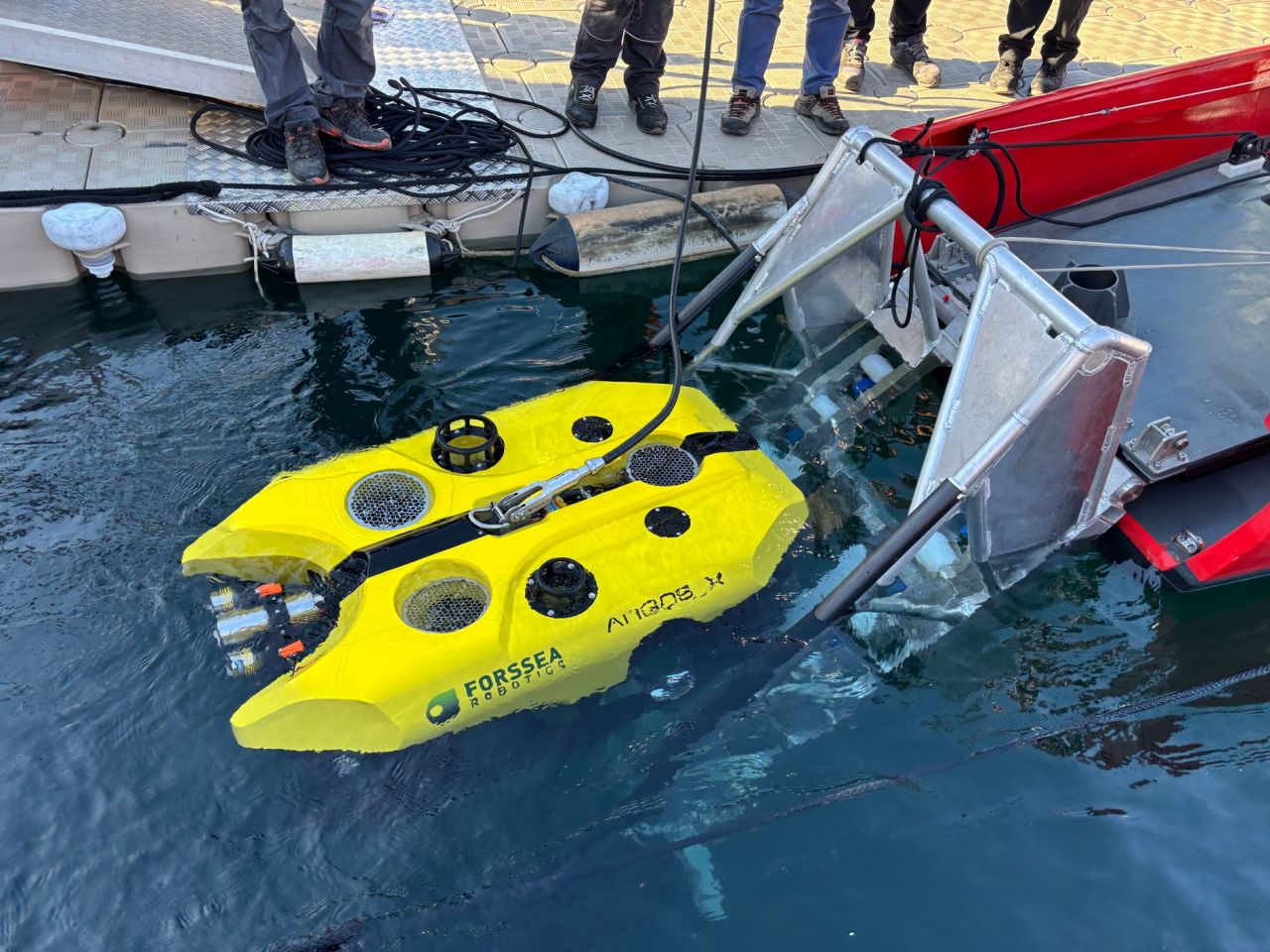
16.04.2026Французские компании Forssea Robotics и Exail объявили о завершении интеграции нового гибридного телеуправляемого подводного аппарата (ROV) Argos X с безэкипажным надводным аппаратом (USV) среднего размера DriX O-16. Сотрудничество компаний началось в 2020 году, а интеграция была завершена в 2026 году. Argos X позиционируется как гибридный ROV, способный выполнять скоростные инспекционные работы в толще воды с противодействием течениям до +2,5 узлов и оснащённый комплектом ПО для полной автономности.

Значение проекта для развития USV
Интеграция Argos X и DriX O-16 - иллюстрация перехода от концепции одиночных беспилотных платформ к концепции полностью безэкипажных многокомпонентных систем. DriX O-16 выступает не просто как носитель, а как координационный центр: аппарат оснащён системой запуска и подъёма, которая позволяет развёртывать не только ROV инспекционного класса, но также буксируемые и автономные подводные аппараты (AUV). Совместная работа связки «USV + ROV» открывает возможность полностью автономных подводных инспекций - от обнаружения цели до её обследования и возвращения на USV без участия человека.
В сочетании со спутниковым каналом связи (это обычно Starlink) оператор может удалённо наблюдать за работой ROV в реальном времени через обычный веб-браузер, что устраняет необходимость в присутствии персонала на борту во время подводных работ. Длина DriX O-16 - 15,75 м, водоизмещение - 10,5 т, заявляемая компанией автономность - до 30 дней, что позволяет выполнять длительные миссии без захода в порт.


Гибридные USV - это перспективно
Перспективы гибридных USV связаны с их способностью заменять сразу несколько типов традиционных судов. Один такой аппарат совмещает функции надводного судна для доставки, системы динамического позиционирования и спуско-подъёмного устройства. В отличие от использования отдельного экипажного судна для поддержки ROV, связка USV + ROV готова существенно сократить эксплуатационные расходы за счет отказа от экипажа в море и топливной эффективности DriX (который обеспечивает снижение углеродного следа на 95%). При этом достигается сопоставимая, а в ряде случаев — более высокая точность данных благодаря работе датчиков в среде с низким уровнем собственных шумов.
Это первая система спуска ROV на борту USV?
DriX O-16 с момента своего анонса в марте 2024 года позиционировался как платформа, оснащённая системой запуска и восстановления для ROV и AUV. Но за последние 2 года на рынке появились и другие примеры. В декабре 2025 года Kraken Robotics совместно с TKMS ATLAS UK продемонстрировала USV-LARS (систему запуска и подъёма для USV) на 11-метровом USV ARCIMS, предназначенную для работы с буксируемой гидролокационной системой KATFISH.
В апреле 2026 года компания Vestdavit (входит в Fairbanks Morse Defense) представила полностью автономную систему AutoHook LARS, использующую ИИ для автоматического сцепления с USV без участия человека; система сертифицирована для работы при волнении Sea State 4. Тем не менее, интеграция Argos X и DriX O-16 - один из первых примеров, когда специализированный гибридный ROV, оптимизированный для размещения на безэкипажном носителе, с полным автономным ПО и возможностью работы в безтросовом режиме, объединяется с USV как единый коммерческий продукт, а не как результат разовой демонстрации.
Особенности ROV Argos X
Стоит отметить, что ROV Argos X спроектирован как гибридный аппарат. В своей стандартной комплектации он работает по кабелю, но может быть дооснащен аккумуляторным отсеком для выполнения полностью автономных миссий без физической связи с материнским судном, по аналогии с АНПА (AUV). Управление командами и передача данных организована через гибридную систему, которая объединяет возможности кабеля и спутниковой связи.
В стандартном режиме оператор управляет ROV в реальном времени через веб-браузер с удаленного командного пункта, используя спутниковую связь.
В автономном режиме собираемые данные записываются в память ROV. Для передачи на ROV критически важных сигналов может использоваться акустический модем, но в целом управление осуществляется по загруженному перед стартом миссии заданию, а не в реальном времени с базы.
Используется ПО полной автономности от Forssea. Аппарат автоматически строит маршрут по путевым точкам и следует по ним.
Компания отмечает расширенное динамическое позиционирование - аппарат стремится удерживать позицию в толще воды даже при наличии течений (пока на это хватает мощности движителей). Другая особенность - аппарат способен компенсировать задержки сигнала, что критически важно при управлении через спутник.
((Все фото - компании Exail))









