
Галтель
Галтель -- Каталог подводных роботов
Мобильный многоцелевой комплекс освещения донной и придонной обстановки типа "Галтель - Алеврит". Не является глайдером, погружение осуществляется за счет работы винтов. Проектировался по заказу российских военных. Предназначен для выявления подводных мин, но может использоваться и для других задач.
Автономные необитаемые аппараты могут сканировать глубины до 400 м. За счет использования группы аппаратов достигается повышение скорости обследования площадей.
Кроме двух АНПА Галтель в комплекс входит также ТНПА Галтель.
В комплекс входит также аппарат Чилим, предназначенный для уничтоженияобнаруженных опасных предметов.
Внешний вид

2020.08.24 Источник фото:



2018.08 Команда Росгвардии на соревнованиях по использованию АНПА и ТНПА во Владивостоке. /

источник:
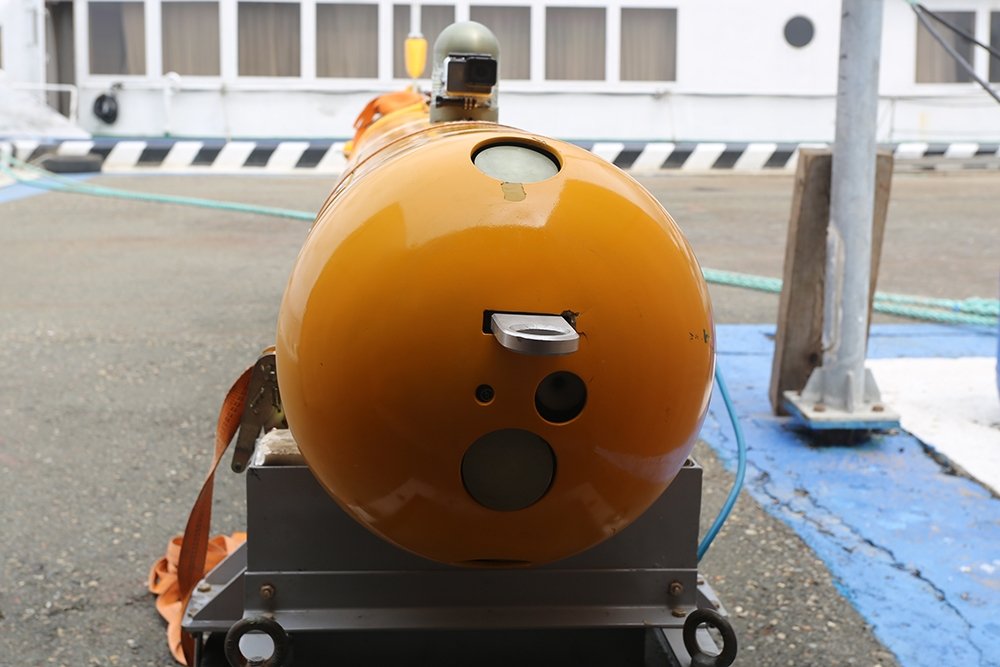
Фото: 2018.08 пресс-служба ФПИ,

2018.08 пресс-служба ФПИ,
Разработчик
Институт проблем морских технологий РАН (ИПМТ РАН).
Технические особенности
- может ориентироваться под водой по сигналам гидроакустических маяков
- может двигаться под водой по циклоиде или спирали
- задание вводится в вычислительное устройство аппарата по кабелю, затем он действует автономно
- до 12 часов автономного действия - за это время способен обследовать 4 кв.км дна.
- глубина погружения - до 400 м
- запас хода - до 100 км
- средняя скорость - до 8 км/ч (рассчитана как 100 км / 8 ч)
- автопилот с поддержкой алгоритма обхода препятствий
- оснащен гидролокатором бокового обзора
- при движении под водой ориентируется по сонару
- рассчитан на среднюю температуру воды - 15 градусов. В более теплой воде приходится тратить больше энергии на охлаждение оборудования.
- в комплект входит 2 однотипных подводных аппарата "Галтель" и телеуправляемый подводный аппарат "Чилим" для повторного обследования обнаруженных автономных роботом объектов.
- при визуальном обнаружении подозрительных (по оценке робота) фотографирует его, проводит видеосъемку и всплывает, чтобы передать информацию по радио на диспетчерский пункт, который располагается на противодиверсионном катере "Грачонок".
- вес 180 кг
Статус
2017.08 Создано 2 автономных аппарата "Галтель". Один из них является телеуправляемым. Неуправляемый робот находит потенциально проблемные места, телеуправляемый робот позволяет детально такое место обследовать. Комплекс используется в Сирии (обследования акватории близ российской базы ВМФ в Тартусе). Базой выступает катер "Граченок" на котором базируется пост управления комплексом и точки для зарядки батарей подводных аппаратов.
2016.12 Продолжаются испытания комплекса автономных необитаемых аппаратов на Тихоокеанском флоте.
2012 Комплекс "Галтель" испытан в 2012 году в бухтах Владивостока.
Новости
2020.08.23 Комплекс принимал участие в соревнованиях Восточный бриз 2020.
2018.08 Комплекс использовали для участия в соревнованиях подводной робототехники Аквароботех-2018 во Владивостоке. С АНПА Галтель выступала команда Тихоокеанского флота и Института проблем морских технологий РАН. И заняли с ним первое место в соревнованиях для разработчиков. Правда, со второй попытки, при первом погружении выявились проблемы с балансировкой.
2018.02.25 Сообщается, что комплекс Галтель прошел опытную эксплуатацию в районе порта Татртус в Сирии. Планируется его "доработка и развитие". Была составлена карта дна акватории. /
2017.09.03 Автономные покорители глубин: на что способны российские подводные роботы /
+ +









