
GhostSwimmer
GhostSwimmer -- Каталог подводных роботов
Проект разработки подводного необитаемоего аппарата, основанного на бионических принципах движения. Разработкой с 2008 года занимался Д.Баррет, известный работами в MTI в 90-е года над прототипом RoboTuna совместно с ASG (Advanced Systems Group), входящей в Boston Engineering. Финансирование разработки - грант ВМС США. Профессор Баррет занимался "мозгами" и датчиками робота, входящими в систему управления, а спецы ASG разрабатывали движетель.
Разработка на ранней стадии называлась RoboTuna 2, но затем ее переименовали в GhostSwimmer.
Систему управления изучали первоначально в условиях бассейна, в отсутствие готового движетеля, использовался экземпляр с обычным винтом, вмонтированным в неподвижный хвост. Позднее появилась версия с плавниковым движетелем, который приводят в движение искуственные мышцы на основе электроактивных полимеров, т.е. полимеров, сокращающихся при подаче на них напряжения.
Видео
Прототип с винтом в хвосте "рыбы", 2013.01
Статус
Результаты испытаний в июле 2009 года были интересными и Boston Engineering получила дополнительное финансирование в рамках проекта BILIS береговой охраны США создания телеуправляемой бионической системы для наружного осмотра судов и проверки морских жидких грузов. Новое изделие получило название BioSwimmer (Biometric-In-Oil Swimmer/BIOSwimmer). В 2012 году устройством заинтересовались также в ВМС США, где планировали закупить модификацию BioSwimmer под военные нужды.
Сравнение работы GhostSwimmer и типичного и сравнимого по-размерам устройства, выполненного по типовой схеме - REMUS 100
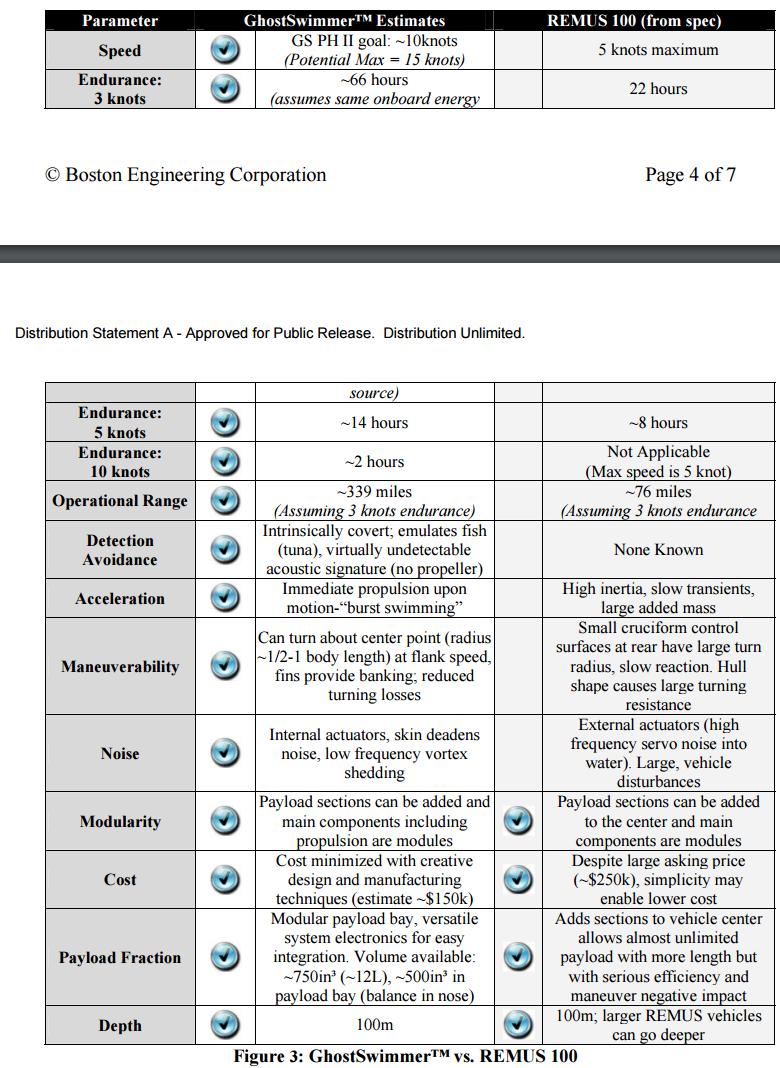
Источник:









