

Пневмогенератор повысит эффективность мягких роботов
16.10.2015Исследователи Университета Окаяма, Япония, на днях опубликовали видео, демонстрирующее безтрубочный пневмогенератор, который можно использовать в мягких актуаторах различного типа.
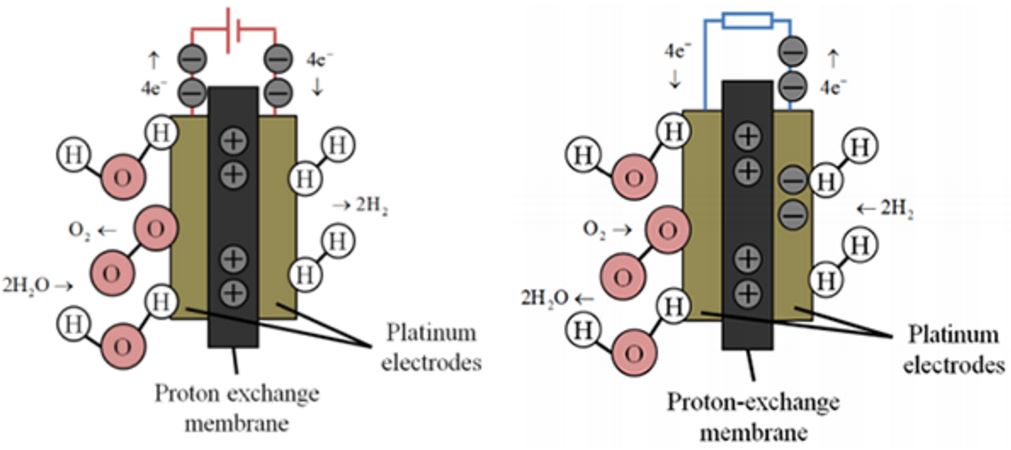
Устройство работает следующим образом. Основной элемент - это каталитический газогенератор - платиновые электродов и расположенная между ними ионообменная мембрана. Если подать на электроды ток от аккумулятора робота, вода за секунды разлагается на молекулы H2 и O2 - произведенная смесь газов может совершить необходимую работу, например, привести в движение актуатор робота.
Источник картинки:
После отключения тока генератор становится своего рода “топливным элементом”, молекулы H2 и O2 вступают в реакцию, вновь превращаясь в H2O. При этом генерируется электричество, которое подзаряжает аккумулятор робота.
Соответственно, пока у робота есть запас энергии в аккумуляторе, актуатор или несколько актуаторов, построенных по этому принципу, будут работать.
В отличие от роботов с воздушным компрессором, в новом устройстве отсутствуют движущиеся части, оно не имеет внешних шлангов и не расходует дополнительную энергию для того, чтобы “сдуваться”.
Интересующиеся могут найти подробное описание принципа действия новой разработки на английском языке .
Роботы с мягкими элементами конструкции - актуальное направление робототехники. Зачастую они безопаснее тех, что выполнены из металла и твердых пластиков, к тому же отсутствие жесткого “скелета” позволяет софтроботам адаптироваться к различным задачам. Мягкие модули нередко могут улучшать функционирование машин, в частности, подобные захваты не нуждаются в сложных вычислениях для того, чтобы поднимать большинство предметов.
Видео некоторых мягких роботов:
Разработка iRobot Morphing Blob.
Перекатывающийся Chembot из MIT.
Мягкий “робот” из Гарварда.
Прыгающий мягкий робот из Гарварда.
Переход к использованию мягких модулей требует изменений в конструкции робота. В частности, для того, чтобы обеспечивать движение мягких модулей мало подходят традиционные электромоторы или сервоприводы. В некоторых конструкциях мягких роботов использовали пневматику, как в ряде промышенных роботов. К сожалению, для ее работы требуется использование компрессора - устройства шумного и не очень надежного, а постоянные “выхлопы” воздуха годятся разве что в стимпанковой модели робота.
“Мягкая” робототехника получает все более широкое распространение. Она позволяет уйти от сложных расчетов там, где можно обойтись пластичностью самого робота. Подобно тому, как человек не задумывается о каждом следующем шаге или вдохе, машины с мягкими элементами полагаются на свое устройство, а не на комплексные вычисления. И хотя мы вряд ли увидим дорогие и многофункциональные мягкие роботы в ближайшие годы, их отдельные элементы эффективно применяются уже сейчас. Наиболее распространенные из них - всевозможные манипуляторы и захваты.
Можно вспомнить манипулятор Festo , устройство , мягкий захват разработки MIT и другие.









