
В Гарварде разработали мышцы для мягких роботов
08.06.2016Большинство современных роботов лишены подвижности и гибкости, присущих “мягким” организмам, таким, например, как люди. Заимствованием инженерных решений из природы занимается бионика. Над этим направлением робототехники трудятся в Гарвардском Университете, где недавно разработали новый тип “мышечного” актуатора.
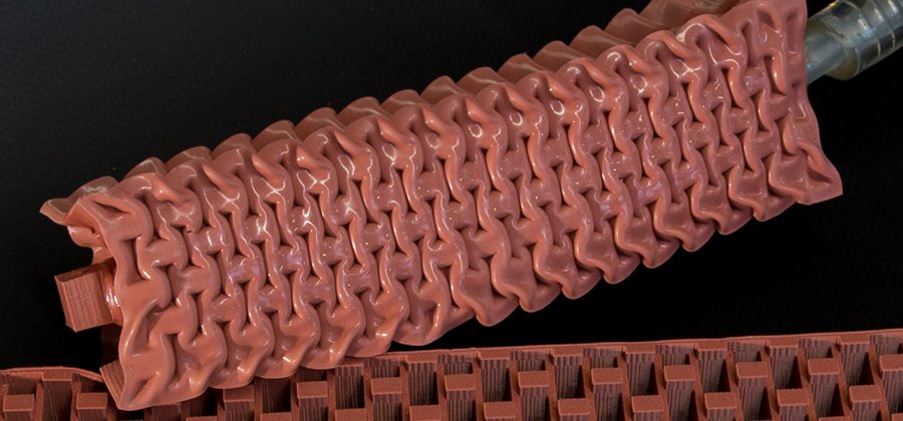
Действие новинки чем-то напоминает работу человеческого бицепса - в частности, близко к нему по времени отклика и эффективности. Разработка получила название VAMPs (vacuum-actuated muscle-inspired pneumatic structures - “пневматические структуры, приводимые в действие посредством вакуума, повторяющие характеристики мышц”). Для активации системы, из нее откачивают воздух, вакуум в полостях заставляет актуатор сжиматься, приводя его в движение - оно может быть линейным, скручивающимся, сгибающим или их комбинацией. До сих пор, подобные системы в роботах широкого применения не нашли, поскольку многие конструкторы уверены в их потенциальной уязвимости - достаточно нарушить герметичность “мышцы”, чтобы она перестала работать, а вместе с ней и робот.
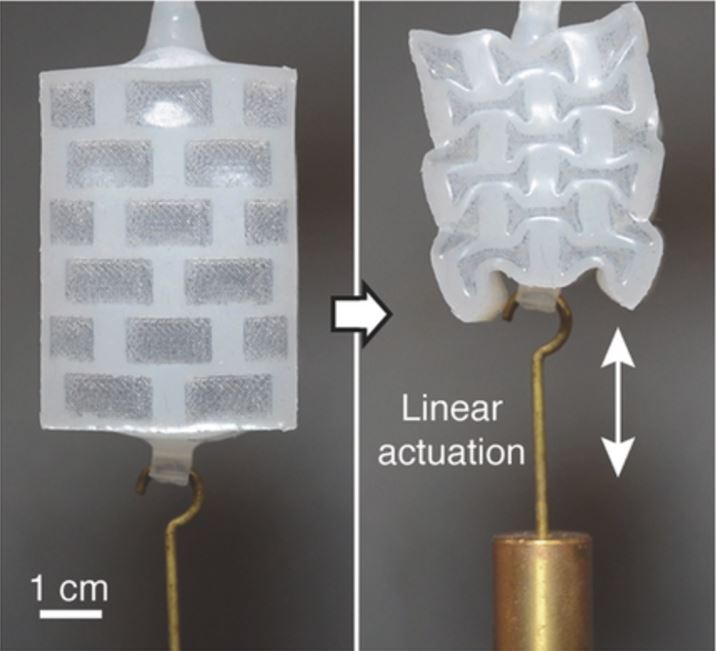
Актуатор VAMPs выполнен из “эластомера”, структуру которого формируют регулярные соты, которые и сжимаются при откачке воздуха. В зависимости от структуры сот можно придавать актуатору Разработчики заявили о том, что структуру “сот” можно , при необходимости, изменить, что повлияет на траекторию их движения при сжатии - будет ли она линейной или актуатор, например, изогнется. За счет “клеточной” структуры VAMPs продолжит функционировать даже, если получит незначительные повреждения, например, разрыв диаметром до 2 мм. Критическое повреждение мягкого актуатора не повлечет опасности для окружающих, он просто останется неподвижным.
Вполне возможно, что вскоре подобные системы задействуют для производства мягких роботизированных захватов. Таким роботам не нужны сложные расчеты и сенсоры для того, чтобы поднять предмет, как не нужны и различные “насадки”, зависящие от типа объекта. Мягкий манипулятор легко захватывает объекты любой формы, не повреждая их.









