
Может ли технология МРТ перевести роботизированную медицину на следующий уровень?
30.03.2017Инвазивные (связанные с проколами и разрезами) хирургические методы позволяют врачам эффективно лечить болезнь, но иногда приводят к серьезным осложнениям и значительно замедляют исцеление пациента. Сотрудники Хьюстонского Университета, США и Хьюстонского Методистского госпиталя, США объединились с тем, чтобы придумать метод лечения, свободный от этих проблем. Они разработали ряд алгоритмов и вычислительных методов, которые помогут работать с технологиями магнитно-резонансной томографии (МРТ), с тем, чтобы направлять по венозной системе десятки крошечных роботов в любое место человеческого организма для диагностики и лечения.

«Магнитный резонанс обеспечивает непревзойденную визуализацию мягких тканей, и мы можем использовать магнитные катушки МР сканера для управления мелкими намагниченными частицами», - сказал Аарон Беккер, доцент кафедры электротехники и вычислительной техники Хьюстонского Университета и ведущий исследователь эксперимента. «Большой проблемой стало то, что МРТ сканеры предназначены для визуализации, а не для управления передвижением мини-роботов. К тому же требуется как-то собирать и запасать энергию для мини-роботов. Решение этих проблем еще потребует определенных усилий и ухищрений.»
Ключевым вопросом является управление мини-роботами в режиме реального времени. Беккер отмечает, что у врача должна быть возможность в любой момент корректировать действия роботов. К сожалению, даже самый быстрый из существующих МРТ пока что не справляется с этой задачей, информация о ередвижениях и действиях мини-роботов поступает с задержкой.
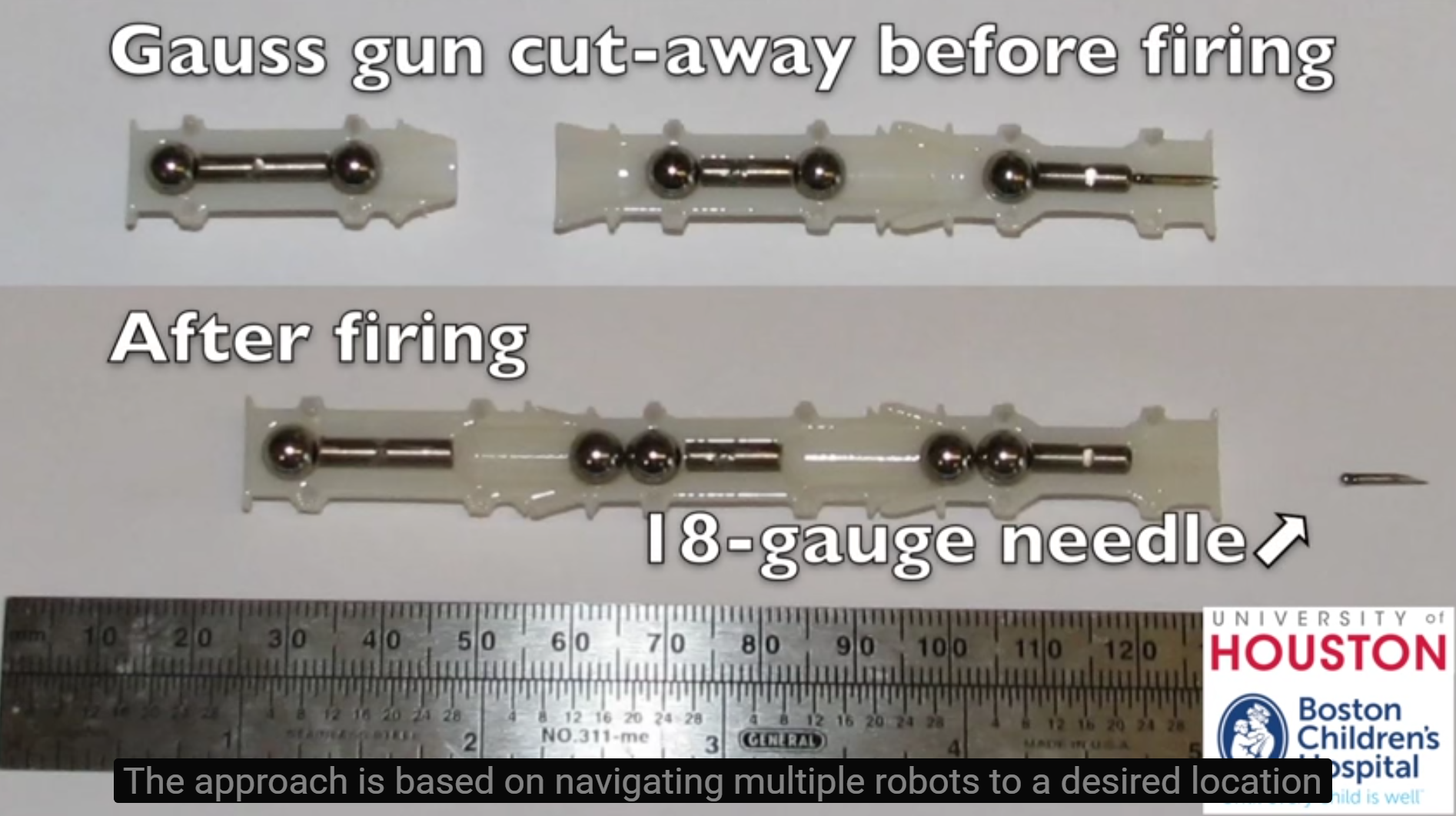
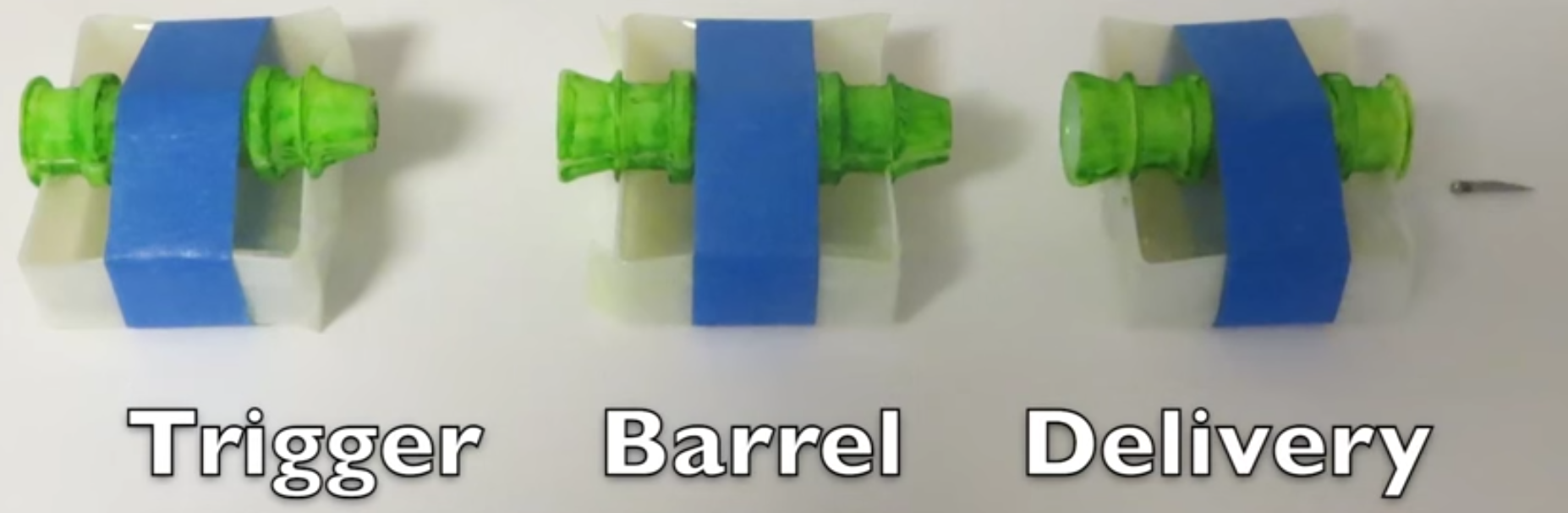
По словам Беккера, МРТ сканер обеспечивает достаточное магнитное поле, чтобы управлять роботами, пока они движутся через кровеносные сосуды в организме, но мощности МРТ не хватает, чтобы робот мог проникнуть в тело опухоли или в другие ткани человеческого тела. Пути решения этой проблемы изобретатели ищут, работая с двумя различными конструкциями мини-роботов. Первая основывается на принципе механического резонанса, другая формируется в ходе самосборки внутри человеческого тела хирургического инструмента, известного как Гаусс-пушка.
Мини-роботы, созданные на концептуальном этапе, - размером около двух сантиметров. Это, понятно, слишком много. По словам Беккера, задача сейчас состоит в том, чтобы создать группу мини-роботов, размер которой сможет варьироваться от 0,5 до 2 мм. То есть каждый отдельный мини-робот должен быть меньше диаметра человеческого волоса, примерно около 0.08 мм.
Беккер считает, что данная технология созреет для клинического использования в течение следующего десятилетия, однако для реализации идеи потребуется команда энтузиастов - робототехников, МР-физиков и врачей, которые хотели бы расширить границы возможного. Пока что основными помощниками Беккера в исследовании стали Николаос Тсекос (Nikolaos Tsekos), адъюнкт-профессор компьютерных наук директор по медицинской робототехнике лаборатории Х. У, который имеет опыт работы в МРТ и вычислительных методах, и Дипан Я. Шах (Dipan J. Shah), кардиолог и директор сердечно-сосудистой системы МРТ в Хьюстонской Методистской больнице.
Команда Беккера сейчас проверяет возможности доставки мини-роботами химиотерапевтических препаратов в определенные участки человеческого организма, а также задумывается о борьбе с опухолями и даже их механическом уничтожении с помощью мини-роботов.
Американцы не одиноки в идее использования микророботов, запускаемых в тело человека для доставки лекарственных препаратов в заданные точки или даже для хирургических вмешательств. Тема разработки роботизированных таблеток набирает популярность. Есть разработки микророботов для проведения точечных вмешательств, как, например, работы Сальвадора Пане из Швейцарской высшей технологической школы Цюриха. Аналогичные разработки ведут и в Южной Корее (совместно с США), где МРТ также используется для управления микророботами. Нет сомнений, что это весьма перспективное направление развития медицины.
+ +









