

Конспекты: Проект Агробот: Технология, цели проекта и реализация
24.04.2017Виталий Савельев, руководитель направления "роботизированная сельхозтехника" компании Avrora Robotics выступил с этой презентацией 27 февраля на встрече “Робототехника в сельском хозяйстве”. Вашему вниманию предлагается конспект выступления, подготовленный в RoboTrends.ru, посвященный автоматизации наземных платформ.

ВС: Мы разрабатываем систему управления плюс софт, которые способны контролировать движение и управлять различной наземной техникой, будь то колесная или гусеничная.

На картинке концептуально показано, как все устроено и работает. Есть некая движущаяся платформа. Не принципиально, она создается с нуля или автоматизируется готовая. Автопилот Avrora на картинке - это, собственно, “мозг” беспилотника: вычислитель и предустановленный на него программный комплекс нашей разработки. Внизу на картинке показаны необходимые дополнительные компоненты - сенсоры и привод, это “органы чувств” - лидары и камеры, дополнительное навигационное оборудование и система приводов. Если техника поддерживает прямое управление, то можно начинать ее эксплуатацию. Если же говорить о какой-то традиционной технике, то потребуется еще дооснащение электромеханическими приводами, которые превращают команды вычислителя в механические перемещения исполнительных устройств, например, в тракторе. Плюс центральный мозг постоянно подключен к управляющему центру. Непосредственно вычисления и принятие решений осуществляется на борту. При этом у оператора есть возможность в любой момент перехватить управление, вмешаться и взять на себя непосредственное управление, выполнив какие-то операции в полуавтоматическом режиме.
Так выглядит компьютер. Сейчас основным партнером является NVidia, но в принципе систему можно реализовать и на российских компонентах.

На слайде показаны основные направления деятельности нашей компании. “Приземление” этих технологий, которыми мы располагаем, это, прежде всего, логистика, как грузовая, так и легковая. Автоматизация сельского хозяйства, - это то, о чем мы сегодня будем говорить. Это различные системы автопилотирования для спецтехники. И есть еще очень интересный образовательный проект - это маленькие робомобили, которые позволяют готовить кадры, специалистов, осваивать азы работы с беспилотниками.
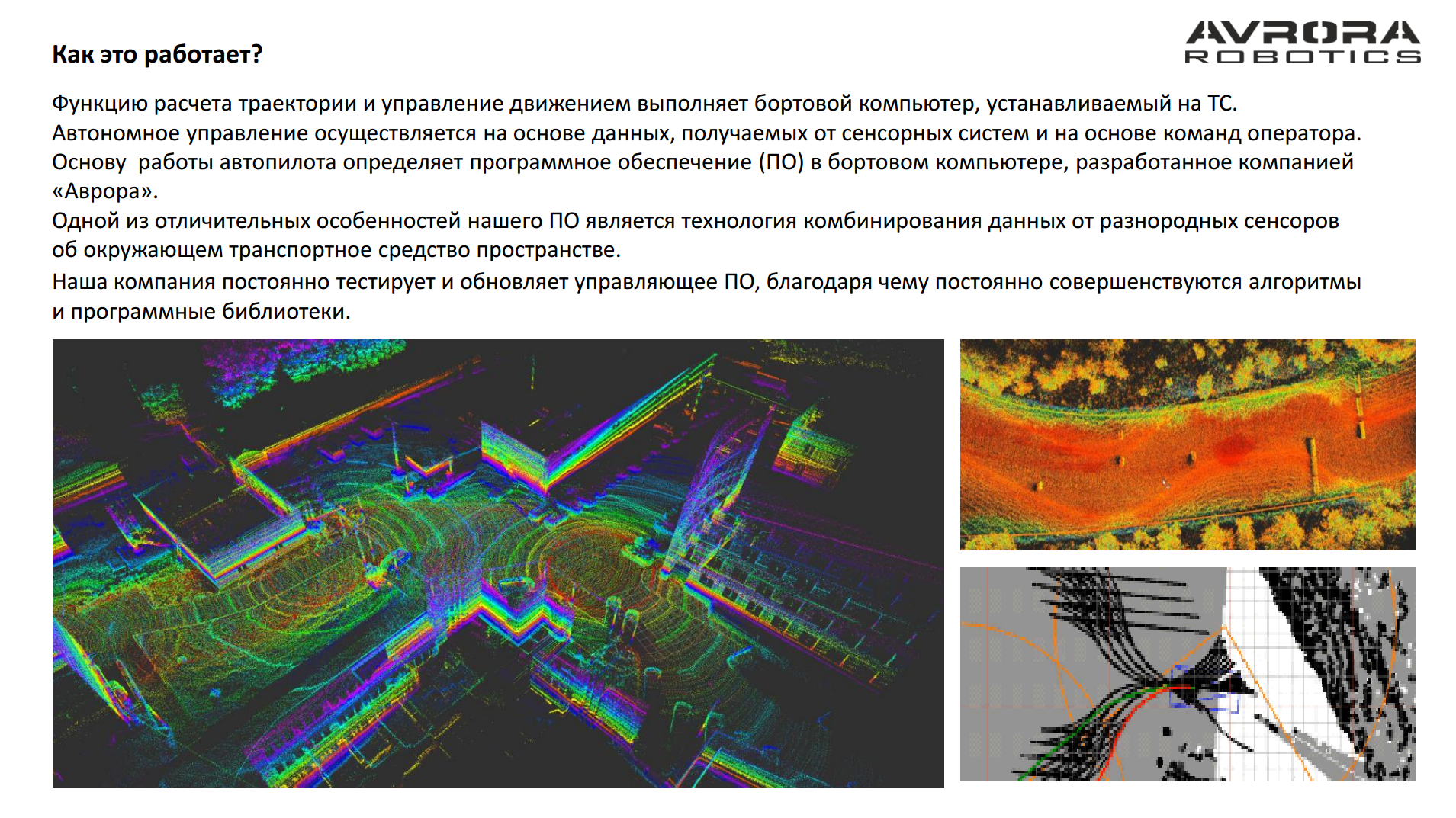
Информация, которая приходит от сенсорики, от лазерных сканеров, от навигационных систем, обрабатывается в реальном времени центральным компьютером. Формируется вот такая красивая картинка на которой строится траекторное управление.
На картинке вы можете видеть плотно застроенную местность, поскольку мы работаем не только на пересеченной местности, но и в городских условиях. Суть работы принципиально та же. Сенсорика позволяет добавить на картинку все неровности, все объекты, статичные и динамичные. А затем наша система управления формирует сигналы для исполнительных механизмов.

В этом направлении мы работаем уже порядка 6 лет. Начиналось все с робототехнических соревнований. За это время наш коллектив трижды становился чемпионом российских соревнований по беспилотному движению роботов. Мы представляем Россию на международных соревнованиях и постоянно проводим различные испытания, которые позволяют нам накапливать и совершенствовать базу данных, применимую к реальным условиям.
На фото внизу вы видите отладочные платформы. Это специально разработанные макеты транспортных средств на которых производилось очень много обкатки по различным дорогам для формирования базы данных.

Мы собираем датасеты с помощью различных транспортных средств и платформ. Здесь на фото показаны испытания в летних и зимних условиях автомобиля Газель. В 2016 году мы провели цикл зимних испытаний в сложных условиях совместно с компанией ГАЗ. Испытания были признаны успешными.

Один из ключевых релевантных проектов - это направление “военной тематики”. Мы ведем ряд проектов и являемся соисполнителями разработок по автономизацию различной военной техники. На фото - наша собственная отладочная платформа Марс А800. Все, что видно выше корпуса платформы - это компьютерная станция на базе которой идет отладка алгоритмов и кода робота в полевых условиях.
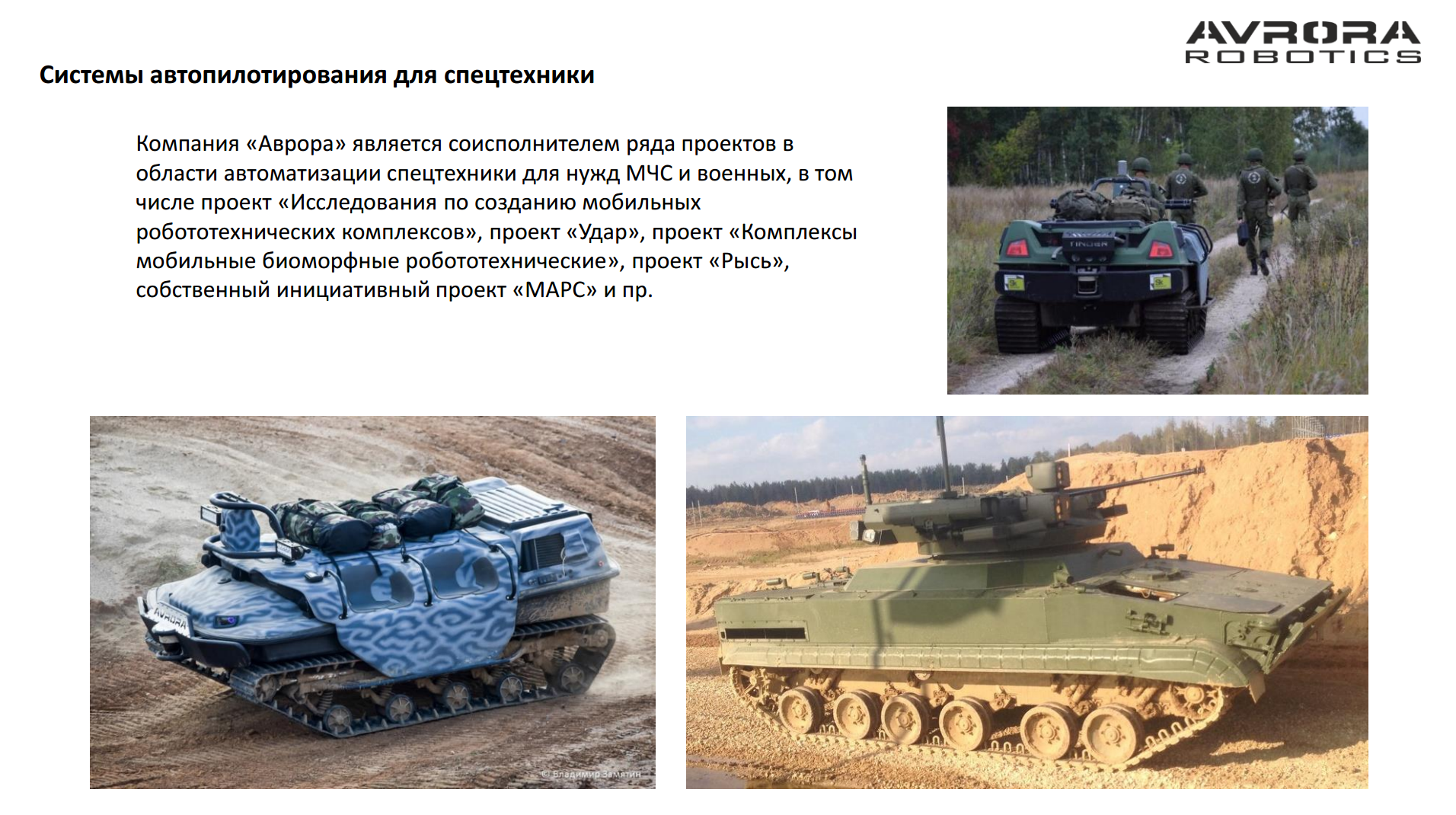
У нас есть немало проектов для МЧС и для оборонного сектора. У нас есть специальная презентация для военных, где показано, как эта техника перемещается по очень сложной местности. Безусловно “полевые условия”, работа в неструктурированном пространстве имеет целый ряд сложных особенностей. Здесь, в частности, есть большая вероятность проскальзывания. Бывали различные казусы, иногда техника оказывалась близка к опрокидыванию. Пока через все это на практике не пройдешь, не столкнешься с реалиями полевой работы решений, сложно говорить о каком-то практическом внедрении.
Хотя все решения до ввода в эксплуатацию, до тестирования на реальных платформах, программисты отрабатывают на симуляторах, на различных программных тестах.

Переходим к проекту “Агробот”. Это “приземление” наших технологий на аргросферу.


В ядре системы лежит аппаратный комплекс Avrora Robotics. Платформа - Владимирского завода тракторных агрегатов. Все вычисления о которых мы говорили, все построения на основе данных сенсорики, здесь применяются в полной мере. В 2016 году мы демонстрировали этот проект на выставке АСИ (Агентства стратегических инициатив). Совместно с Институтом механизации был представлен трактор следующего поколения на выставке “Золотая осень 2016”. Пока для нее используем машины МТЗ.
В 2016 году испытания проводились на полях в Рязанском Агрохолдинге. Целью испытаний было - отработка системы маневрирования, точности движения, работы с различным оборудованием. В настоящее время остается задача отлаживания точности позиционирования и управления трактором как энерго средством, которое передвигает за собой какой-то исполнительный орган.
Мы занимаемся автоматизацией полевого земледелия. Т.е. трактор - это та основа, на которую может устанавливаться любое навесное оборудование, которое для этого предназначено.
Конечно в настоящее время удобнее, экономичнее и проще всего проводить испытания на тракторах малых классов. Мы использовали для испытаний трактор Агробот малого класса с тягой в 0.9 т. По нашему опыту автоматизировать уместно 3-5 классы тракторов.
Движение мы обрабатывали, как в режиме каких-то аграрных действий, так и в другом пространстве, например, проверяли цикличное движение по дороге - это может применяться для выполнения тех или иных коммунальных функций.
Мы не занимаемся разработками “нижней платформы”, благо наше решение позволяет использовать любую существующую платформу, устанавливая на нее центральный компьютер и систему управления, которые занимаются вычислениями и планированием траектории движения.

Здесь примерно описана концепция проекта. То, что я вам сказал, - мы берем существующую платформу, снимаем с нее кабину и превращаем ее в бота или дрона. Такая система нам нравится больше, чем параллельная установка нашего комплекта автономизации с сохранением рабочего места механизатора. Дело в том, что только такой подход позволяет полностью реализовать преимущества роботизированных тракторов, полностью отказаться от использования механизатора, выиграть за счет сокращения зарплатного фонда, от временной зависимости и остальных факторов связанных с “человеческим”. На выходе получаем “рой роботов”, способный выполнять те или иные заданные им функции.

Можно видеть стандартное оснащение робота. Кроме центрального вычислителя все элементы сенсорики крепятся на верхний стеклопластиковый кузов - пока что мы работаем так. Все сенсоры подключаются к бортовому вычислителю.

АгроБот 2.0 - это приложение описанной концепции уже не только к обработке земли, но также, например, защите растений. Например, с использованием магнитно-импульсного воздействия.

В 2017 году планируется запустить тестовое хозяйство, где будет использоваться 4 машины “АгроБот 2.0”.
Кроме работ по обработке земли, наши системы могут решать транспортные задачи, перевозки инвентаря, например, или урожая.

Проект, который предполагается запустить в 2017 году. В нем уже выразили готовность участвовать несколько российских институтов, несколько производителей ПО, оборудования навигации. Испытания планируем развернуть в Рязанской области на базе одного из крупнейших агрохолдингов. Пока что предполагаем, что это будет поле порядка 100 га, разделенное на сегменты. В 2017 году постараемся отработать основные средства и механизмы обработки и вырастить какие-то тестовые культуры.
Планируем также тестовые испытания в Оренбургской области с целью испытаний надежности решения.
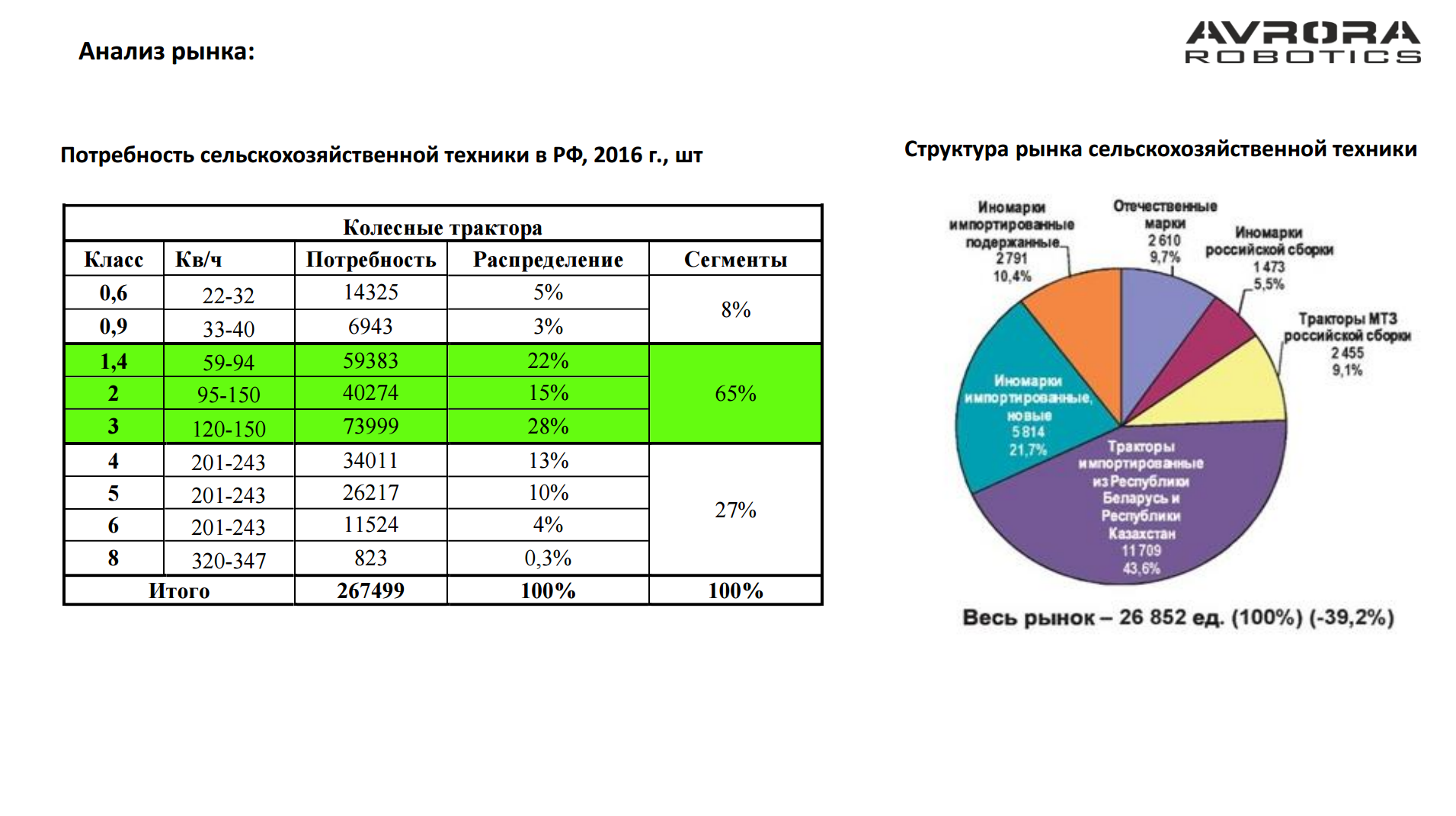
Фокус спроса по классам тракторов вполне наглядно показан в таблице на слайде (отмечено зеленым цветом). Таблица отражает потребность в сельскохозяйственных машинах в России. Это по данным исследований 2016 года. Мы видим, что сегмент, который может подвергаться автоматизации составляет 65% всего рынка.
Из открытых источников - круговая диаграмма справа. Можно видеть, что сейчас “в ходу” и на какие машины мы планируем ориентироваться.
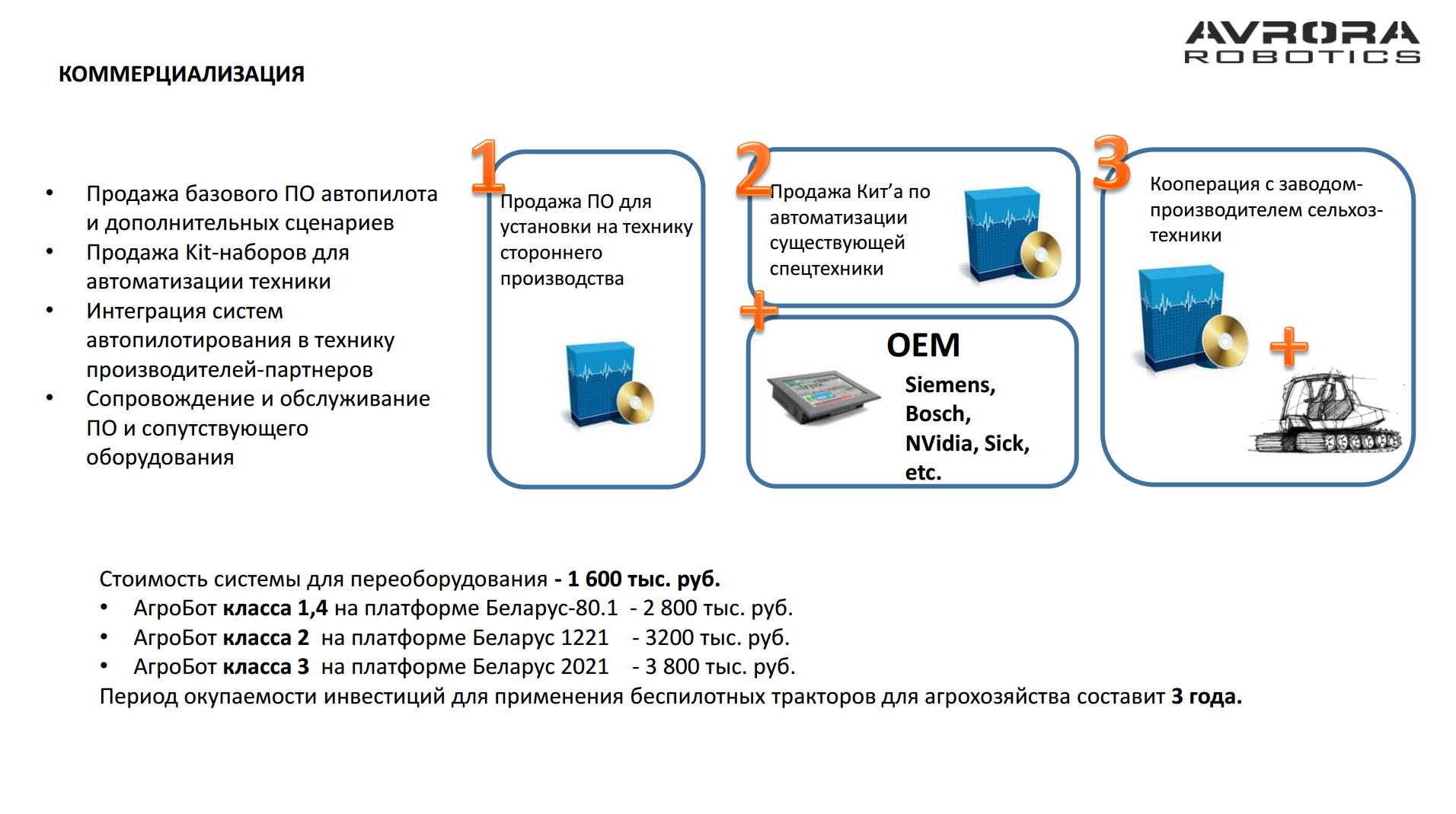
Мы готовы работать с различными схемами коммерциализации решения. Возможна интеграция нашего решения на этапе производства техники. Можем продвигать его в виде комплекта, предназначенного для установки на существующую в хозяйстве технику. А также работать с заказчиком по модели сервиса.
На картинке приведены ключевые цифры. Стоимость системы, того комплекта оборудования, который устанавливается на трактор, на февраль 2017 года составляет 1 млн 600 тысяч рублей. По нашим исследованиям срок возврата инвестиций агрохолдинга, если мы говорим об автоматизации 10 единиц техники, составляет 3 года.
+
Также вашему вниманию - фрагмент сессии вопросов-ответов.
Какова ситуация с сервисным обслуживанием? На что следует рассчитывать?
ВС: Если говорить о сервисном обслуживании нижней платформы, т.е. тракторов, мы никуда не уходим от заводских характеристик, здесь все в штатном режиме. Что касается системы управления, сейчас предусматривается, что за работой всех автоматических машин наблюдает диспетчер. При необходимости, если замечен какой-то сбой в работе оборудования на том или ином из тракторов, диспетчер берет управление на себя. В дистанционном режиме. Пока что, внедряя наши системы, мы просим заказчика брать на себя обязательства постоянного присмотра за работой машин диспетчером. Говорить о надежности работы оборудования, о времени его наработки на отказ, пока что сложно, не хватает объема тестов, чтобы накопить достоверную статистику.
Сколько машин одновременно можно доверить для контроля одному диспетчеру?
ВС: 7-8 машин одновременно.
Как снимаете в поле 3D-картинку?
ВС: С помощью лидара. Больших объектов за которые можно “зацепиться” в поле практически нет. Поэтому приходится “цепляться” непосредственно за поверхность. Особенно лидар необходим при маневрировании, при разворотах.
Сейчас для старта работы на поле трактор необходимо “прогнать” по периметру поля. Диспетчер вручную идентифицирует и “забивает” в карту какие-то объекты, обнаруженные на поле, например, овраги, деревья и существенные неровности. Затем трактор начинает работать в автоматическом режиме, но под контролем диспетчера.
Успевает ли бортовой компьютер справляться с потоком 3D-данных?
ВС: Да, успевает. С лидара у нас идет поток порядка 70 тыс. точек в секунду. Еще пару лет назад мы с таким потоком в реальном времени не справлялись, требовался период в несколько минут для формирования карты. Сейчас идет работа практически в реальном времени, благодаря умощнению аппаратных средств. В зависимости от проекта используем различные типа лидара, с различным разрешением. Тепловизоры не используем в гражданских решениях, трактор у нас останавливается перед любым типом препятствия, независимо от того, живой это объект или неживой. Параметры объекта оцениваются по его габаритам. Есть особая собственная система, позволяющая различать высокую траву и, например, человека. За счет комплексирования различных диапазонов мы умеем различать.
Какое навигационное оборудование поддерживается?
ВС: Мы проектировали систему так, чтобы она могла работать с решениями отечественных и зарубежных производителей. Мы не “брендориентированы” не в сенсорике, не в каких-то исполнительных механизмах. В плане GPS-навигации поддерживаем практически любые устройства. Из российских производителей работаем с “НАВИС” RTK.
Ощущаете ли вы свое отставание от конкурентов?
ВС: Мы специализируемся в разработке ПО. Здесь отставание не так заметно. Мы постоянно ездим на зарубежные показы, видим, что делают коллеги-конкуренты. Все, что касается аппаратных комплексов... системы навигации отечественные есть. А вот системы технического зрения - отечественных лидаров, которые мы могли бы поставить на борт, у нас нет. Компонентная база у нас не вся отечественная. И, конечно, что касается “низовой платформы”, то, что делает John Deer, например, это совсем другой уровень техники. Наше решение, повторю, может работать на любых платформах - отечественных и зарубежных.
Кто несет ответственность за работу роботизированного трактора?
ВС: Вопрос очень многогранный. У нас еще нет утвержденного постановления и принятых законодательных норм в отношении использования наземной беспилотной техники. Здесь, конечно, есть ряд упрощающих моментов, т.к. речь часто идет о закрытой территории, о частной территории. Тем не менее, сейчас даже в рамках испытаний, приходится ряд юридических вопросов решать.
И, конечно, если говорить о каких-то несчастных случаях, происшествиях, - это вероятно будут приниматься решения каких-то рабочих групп в рамках создания законодательного инструмента, который опишет подобные ситуации.
Не поднимет ли все перечисленное стоимость внедрения системы на порядок или выше относительно заявленной стоимости решения?
ВС: Мы работаем над тем, чтобы этого не происходило. В частности, взаимодействуем со страховыми компаниями, чтобы защитить покупателя от рисков. Есть и другие пути, которые стоят отдельного обсуждения.
Как запустить роботизированное оборудование в работу в хозяйстве-покупателе?
ВС: Мы видим, что меняется модель использования такой техники. Сейчас нет никакого смысла купить один такой роботрактор и пытаться от этого что-то выиграть. Нужно постепенно менять подходы к использованию техники, да и агропроцессы. Эти решения интересны, например, хозяйствам, которые строятся вокруг или на базе роботизированной МТС. Когда внедряется комплекс, включающий систему диспетчеризации и несколько беспилотных тракторов и необходимое сопутствующее оборудование. Нужны, например, RTK-сигналы, заправочное оборудование.
Другая модель внедрения, это когда собственниками и пользователями техники становятся сервисные компании. Которые на основе всего этого парка могут оказывать услуги окрестным хозяйствам. Такая компания отлично знает свое оборудование, его потенциал и особенности работы. И уже выполняет работу на уровне договорных, сервисных отношений, например, обработать 100.000 га полей. Они оперативно разворачивают диспетчерский центр и выполняют заказанную работу.
+ +









