
Евросоюз разрабатывает роботов для прокладки тоннелей
19.07.2017В наши дни роботы уже умеют водить, летать, плавать, нырять, выходить в космос и даже бурить лед или морское дно. Одна из немногих неосвоенных машинами стихий - земная твердь: непозволительное расточительство с учетом обилия подземных объектов и коммуникаций!
Европейский Союз спонсирует проект, цель которого - разработка роботизированной системы, способной прокладывать путь под землей, маневрировать, определять свое местоположение, формировать карту местности и осуществлять навигацию, а также нести на борту оборудование для строительства как горизонтальных, так и вертикальных сетей скважин и трубопроводов.
Проект получил название BADGER (Барсук), которое расшифровывается как roBot for Autonomous unDerGround trenchless opERations - буквально “робот для проведения автономных подземных бестраншейных операций”. В отличие от использованного акронима, идея замечательная!
Строительные компании нередко используют широкий набор оборудования для земляных работ при ведении раскопок, а также при прокладке труб и кабелей. Впрочем, у этого оборудования есть целый ряд ограничений - устройства пока что не способны самостоятельно обнаруживать и уклоняться от столкновений с камнями, трубами, корнями деревьев и другими преградами. К тому же, большинство машин пока что не могут прокладывать ветвящуюся сеть туннелей, их возможности ограничены горизонтальными и вертикальными ходами. Еще один их существенный недостаток - дороговизна использования.
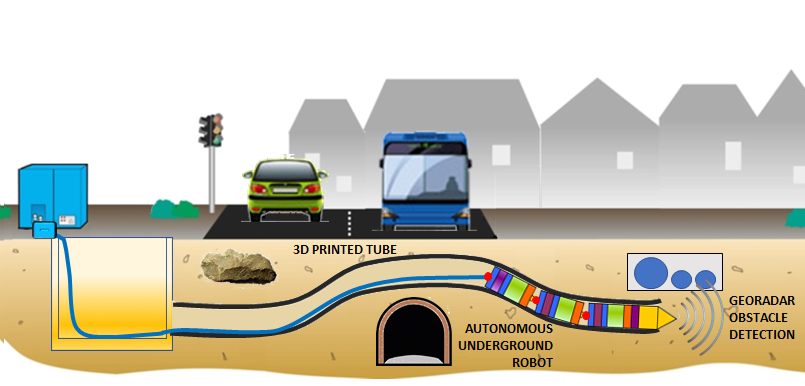
Робот BADGER сумеет автономно зарыться в землю, подготовить место для укладки труб и распечатать для них канал при помощи бортового 3D-принтера. Туннель при этом может поворачивать, подниматься и опускаться и т.п.
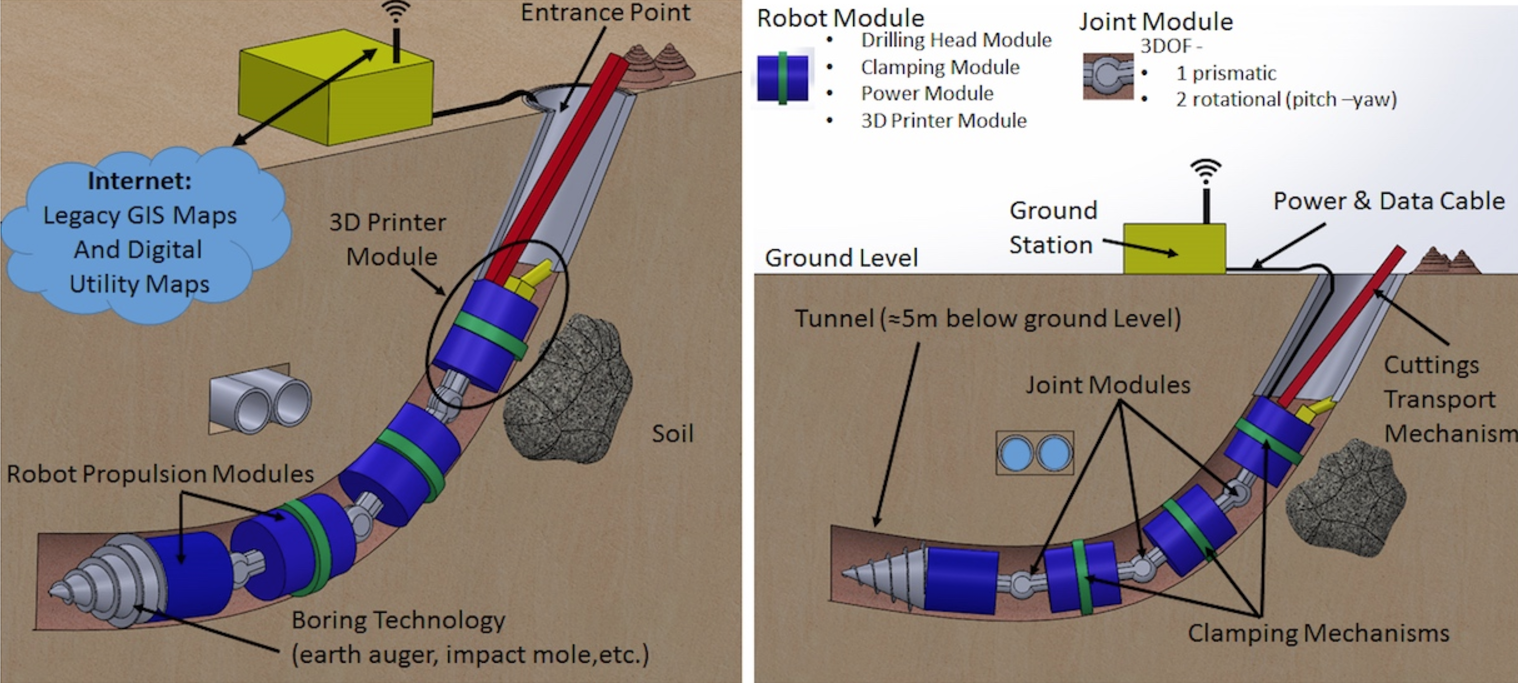
Процесс бурения сочетает роторные и ударные технологии, а также новейший метод ультразвукового измельчения каменной породы. Система всасывает раздробленную породу, оставляя позади себя пустой и чистый туннель. Метод движения аппарата - тот же, что и у земляного червя. Согласно задумке, модульная конструкция BADGER будет состоять из двигательных, суставных и инструментальных отсеков. Инструментальную начинку можно будет менять перед работой в зависимости от поставленных целей.
Устройство оборудуют радарную антенну, способную "просвечивать" тонкий слой земли, сенсоры для навигации под землей и лазеры для контроля курса и реализации метода SLAM (метод одновременного формирования карты и позиционирования на ней робота).
В разработках участвуют 7 заведений из 5 европейских стран. Координацией занимаются в RoboticsLab, сформированной при Мадридском университете имени Карлоса III.
Проект был запущен в январе 2017 года и обеспечен трехлетним финансированием в размере €3.7 млн.
Конечная цель разработок - формирование надежной бестраншейной системы прокладки кабелей с модульной архитектурой, способной осуществлять земельные работы в непредсказуемых условиях подземной среды. Звучит неплохо, не так ли?
+ +









