
Роботы учатся учиться ходить
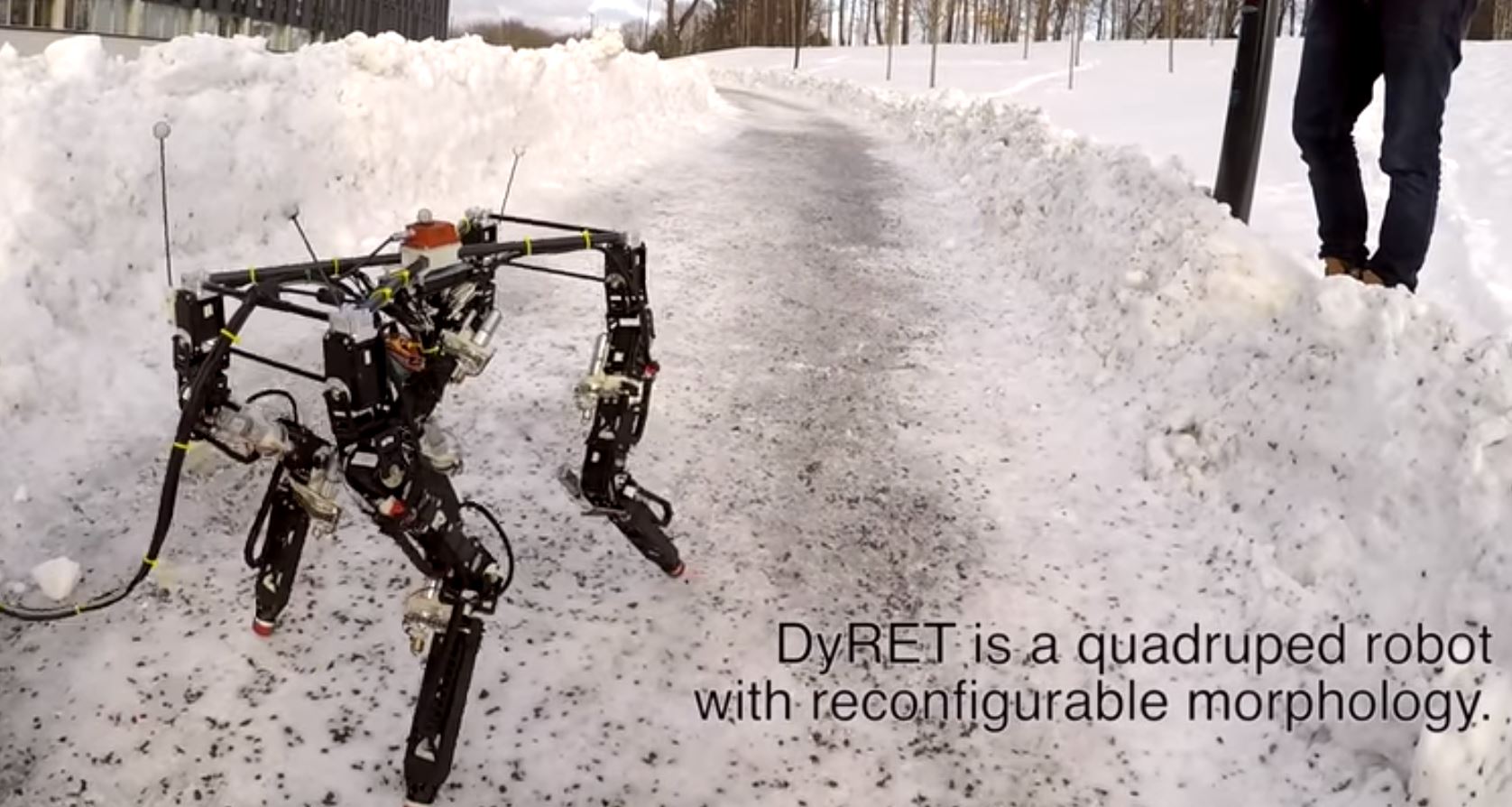
20.05.2018Если бы не отсутствие головы, робот, созданный группой исследователей Университета Осло, Норвегия, выглядел бы неприятно похожим на живое существо. Квадрупед, как принято называть такие конструкции, самостоятельно учится ходить по различным типам местности, обучаясь на сделанных им ошибках.
DyRET не сразу обрел нынешнюю форму, его конструкция несколько раз дорабатывалась после его первого выхода на люди в 2015 году. Его текущий форм-фактор считается наиболее подходящим для передвижения по льду, камням и другим поверхностям. За счет самообучаемости, каждый следующий шаг, неуверенно сделанный DyRET, приближает исследователей к созданию настоящего робота, способного передвигаться по бездорожью.
Когда робота помещают на новый тип поверхности, он начинает по ней перемещаться по-разному сгибая конечности, и иногда падает. Постепенно управляющая программа выделяет паттерны движения конечностей, которые обеспечивают роботу максимальную стабильность, робот начинает использовать только их, и падения практически прекращаются.
Освоив базовое движение по новому типу ландшафта, DyRET не прекращает заботиться об оптимизации движений. В частности, если роботу требуется быстро перемещаться в заданном направлении, он движется на максимально вытянутых ногах, что позволяет делать шаги наибольшей длины. Так получается двигаться быстрее, но на это уходит изрядное количество энергии. По мере того, как истощается запас электричества в аккумуляторе, робот укорачивает шаги, так он движется медленнее, но сможет дольше оставаться в движении.
Постоянная оценка роботом своих действий позволяет зачислить его в категорию “эволюционная робототехника”. Но если в природе для эволюции обычно требуется смена многих поколений, то в робототехнике эволюционировать может любой робот на протяжении собственной "жизни". Более того, выявленные им оптимальные паттерны нетрудно затем загрузить и в других роботов, построенных по той же схеме, тогда им не придется проходить самостоятельно цикл самообучения.
Эволюционный подход - одно из стратегически важных направлений робототехники. Если получится делать роботов, способных к успешному самообучению, это сэкономит гигантские усилия программистов, которые в противном случае пришлось бы потратить на алгоритмизацию и кодинг всевозможных сценариев поведения, которые могут потребоваться роботу.
Чем раньше мы научимся делать роботов, способных самостоятельно разобраться в том, как следует действовать в той или иной ситуации, например, просматривая энциклопедии, руководства или ролики на Youtube, тем скорее мы сможем предоставить их развитие и обучение им самим. Вопросом остается - будет ли это к лучшему или к худшему? .
Посмотреть на других можно в плейлисте по ссылке.
+ +









