
Skolkovo Robotics 2019: Манипулятор для дрона
18.04.2019Помните поговорку - видит око, да зуб неймет? Чтобы летающие беспилотники не оставались только "глазом в небе", к ним можно добавить манипулятор. Такую идею собирается реализовать Ибрахим Низар, аспирант ФГБОУ ВО "Ижевский государственный технический университет" им. М.Т.Калашникова.

автор проекта Ибрахим Ибрахим Низар.
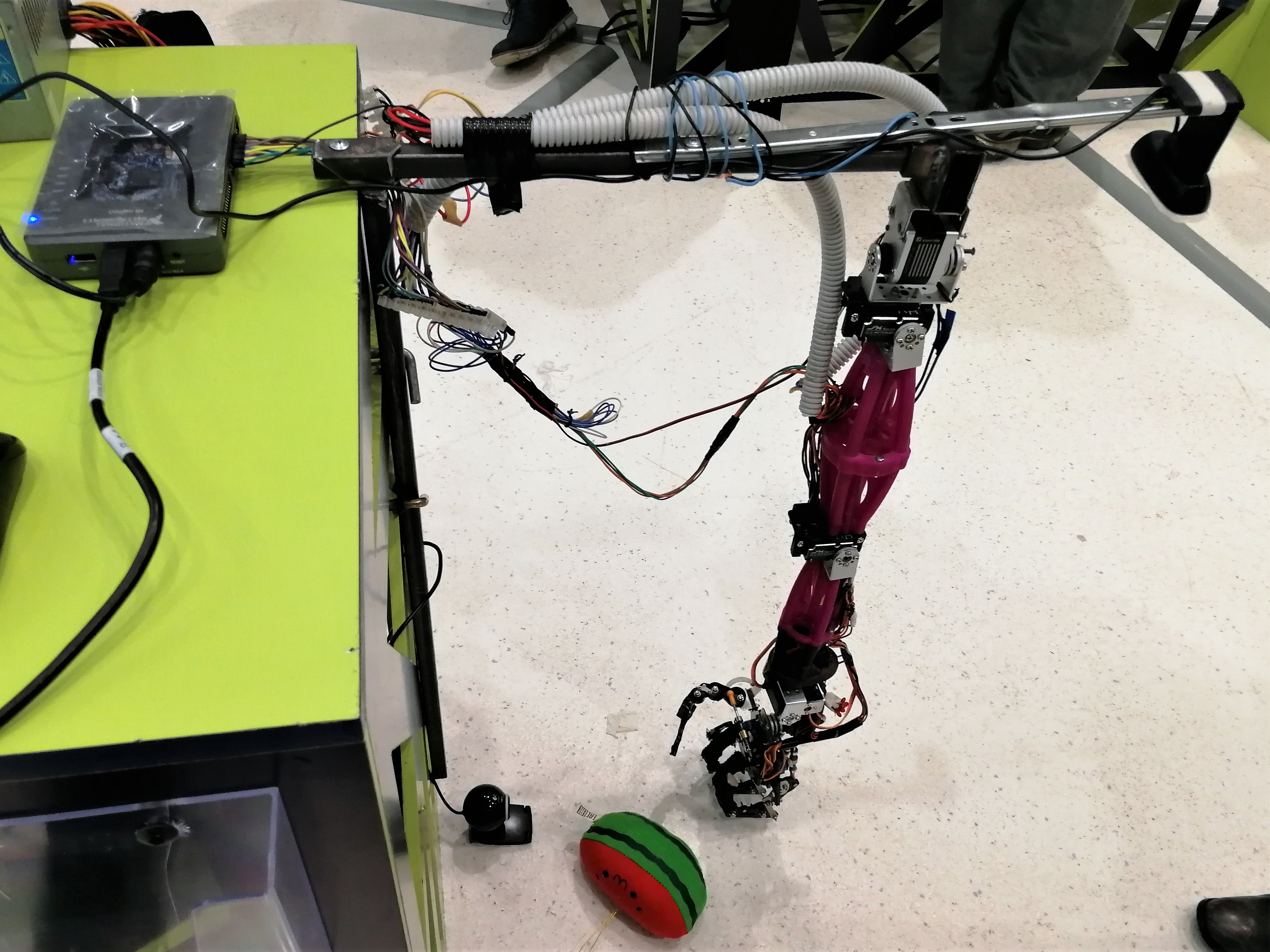
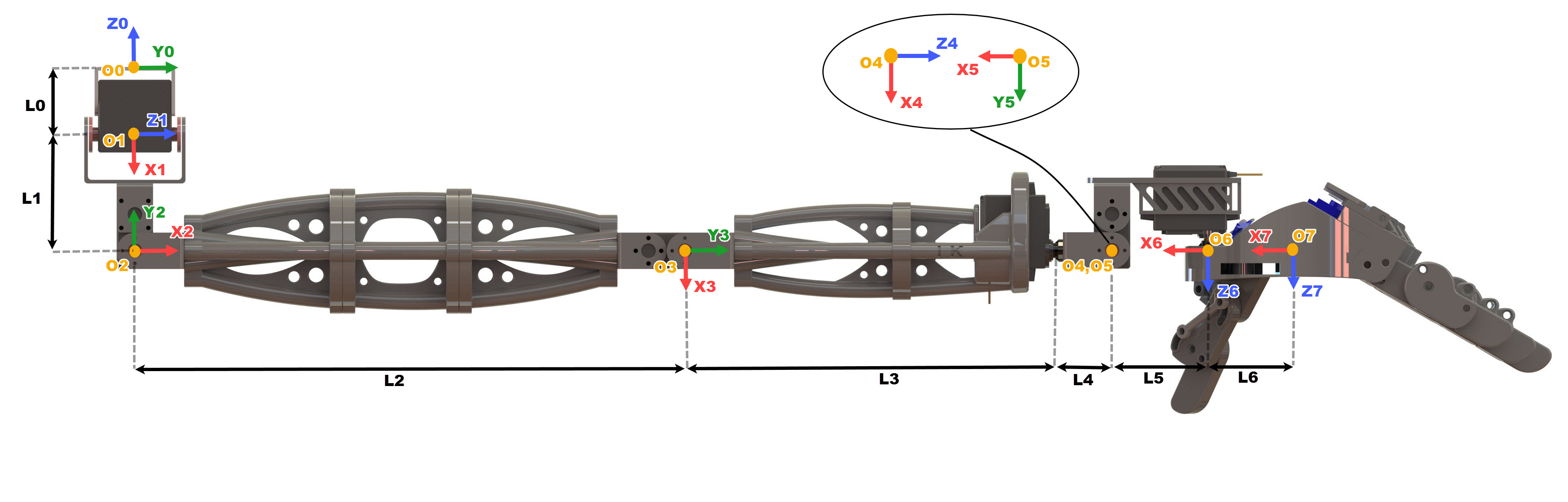
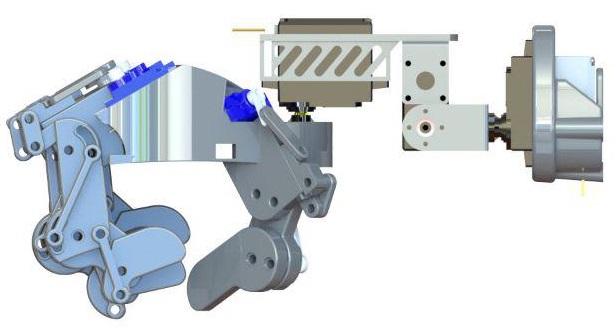
Это специализированный манипулятор с 11 степенями свободы, состоящий из руки, предплечья и кисти.
В теории такие манипуляторы могли бы помочь в перевозке грузов, манипуляциях с электрическими кабелями, переключателями, они могут справиться с отдельными ремонтными операциями, могут пригодиться при проведении спасательных операций, манипуляций с опасными объектами и материалами.
Пока что это, что называется, сырой прототип. В частности, на стенде не была подключена вторая камера (та, что стоит на полу, слева от манипулятора). Если включить не одну, как сейчас, а две камеры, то система компьютерного зрения обретет возможность стереоскопического зрения, тогда движения манипулятора станут точнее. А сейчас после отработки каждого движения, заданного оператором, "рука" совершает ряд покачиваний, что не способствует точности выполнения операций.
Забавная идея, если кто-то помнит фантастический сериал LEXX, в нем были такие (Mantrid Drones), которые могли левитировать, в том числе, перемещаться в космосе.
Как работает манипулятор, вы можете посмотреть в мини-ролике.
Идея работы даже шире - разработчик хотел бы наделить робота навыками участия в человекоподобных взаимодействиях. Такой робот должен иметь возможность получения информации о поведении человека путем наблюдения, прогнозировать, как его собственное поведение влияет на будущие знания и поведение человека, предпринимать шаги по изменению его знаний и будущих действий.
Стретегия робота состоит в том, чтобы использовать двустороннюю связь между наблюдаемым миром и скрытыми состояниями мышления людей.
Наблюдение за действиями человека и рабочей средой вокруг робота дает возможность понять внутренние состояния мышления человека, а информация о действиях помогает роботу предсказывать и повторять поведение человека. Внутренние состояния мышления человека внедряются в робота с помощью технологии нечеткой логики. Выполняя действия, заметные человеку, или иным образом изменяя мир, который видит человек, робот может также пытаться манипулировать внутренними состояниями с целью изменения будущего поведения этого человека. Это поведение может включать ловлю, подбор и размещение предметов, в зависимости от характера манипуляции ими человека. Наконец, робот должен также учитывать то, что человек, вероятно, выполняет те же самые операции логического прогнозирования внутренних состояний робота.
Для разработки робота используется следующее ПО:
- ROS - Robot Operating System
- LabView Vision Module, Control Design and Simulation
- C++ библиотеки
Платформа: MyRIO, National Instrument
+
Идея постановки роботизированных манипуляторов на беспилотник, причем сразу двух реализовала еще в 2016 году японская компания Prodrone Co. Руки способны поднимать до 10 кг. Похоже, что за прошедшие годы идея не получила особого распространения.
+
За новостями летающих беспилотников удобно следить в









