

В небольшом беспилотнике PigeonBot задействовали голубиные перья
22.01.2020Это не орнитоптер, беспилотник PigeonBot приводит в движение электродвигатель с пропеллером. Тем не менее, при его разработке использовались бионические подходы, оператор может управлять конфигурацией крыльев, частично выполненных из голубиных перьев.
Разработку под названием "Мягкие биогибридные морфинговые крылья с управляемыми перьями" выполнила в Стенфордском Университете США группа исследователей: E. Chang; L. Matloff; A. Stowers и D. Lentink.
Научную статью об этом экзотическом гибриде можно почитать в .
Если коротко, то люди не первый раз обращаются к идее заимствования у природы, в данном случае, у птиц - их "наработок" в области полета. Впрочем, особых прорывов пока не было, даже когда у разработчиков получалось что-то, машущее крыльями, такие конструкции обычно называют орнитоптерами, это были жесткие крылья с фиксированными взмахами, как французская Bionic Bird. Ничего общего со сложным управлением группами перьев, характерным для птиц.
Другие исследователи использовали крылья с эластичными мембранами, но это уже, скорее, попытка заимствовать не у птиц, а у летучих мышей, как, например, BigBat.
В Швейцарии экспериментировали с эластичными крыльями, это был шаг, возможно, вдохновивший исследователей из Стэнфорда. Американцы в каком-то смысле "считерили" или, напротив, пошли дальше - в своей разработке они задействовали реальные голубиные перья, что дает им возможность поэкспериментировать - как они себя ведут при движении летающего робота.

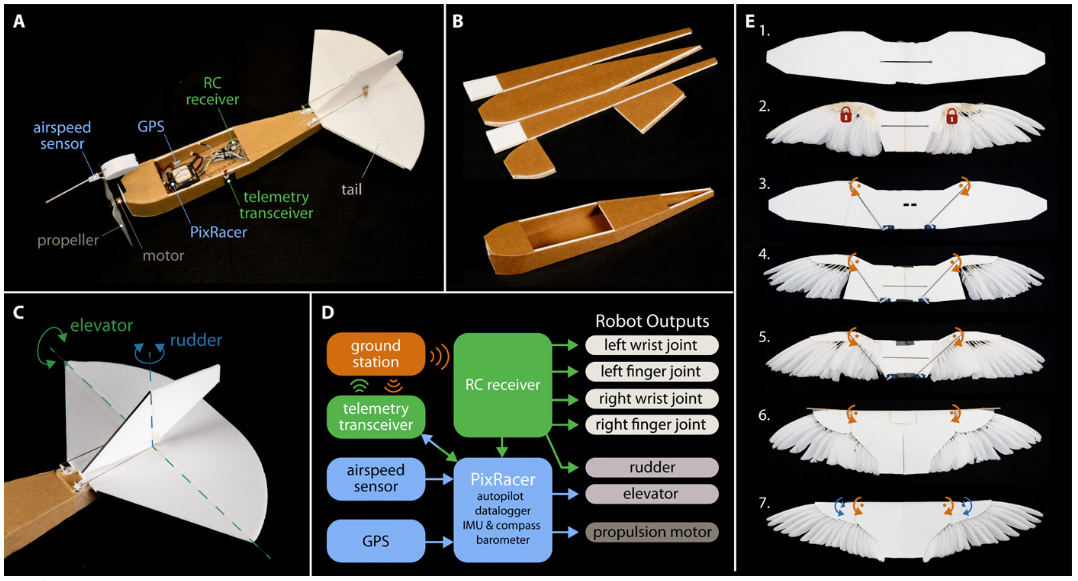
Фото в заголовке и данное фото: Lentink Lab/Stanford University
Возможно многие из обнаруженных эффектов уже были известны биологам, с другой стороны, живую птицу было бы трудно заставить выполнить те или иные трюки, которые раз за разом может выполнять радиоуправляемый беспилотник. В частности, было замечено, что смежные перья при выполнении маневров вначале могут скользить друг относительно друга, но после определенного угла раскрыва как бы "прилипают" друг к другу, используя крошечные элементы, которые исследователи окрестили "направленной липучкой" - это не позволяет появляться зазорам на поверхности крыла.
Источник фото:
Разработчики использовали в конструкции классический пропеллер и жесткий хвост, а управляют движением за счет управления актуаторами искусственных суставов запястья и пальцев к которым прикреплены голубиные перья. Обнаружилось, что креном PigeonBot можно управлять только движением сустава пальца, и этот метод дает более стабильный полет, чем при использовании элеронов на обычных самолетах. В частности, асимметрия морфинга крыла автоматически дает постоянный угол крена. Управлять поворотом по кругу за счет угла крена проще, чем через скорость крена. Это означает, что в условиях турбулентной среды, голубю не требуется постоянно регулировать угол крена, так как процесс идет до какой-то степени автоматически. Чего не скажешь о обычных самолетах.
В общем, подтверждается уже далеко не новая идея - что одним из направлений возможного конструирования является "подсматривание за природой" с заимствованием уже существующих в природе конструкций и подходов. Благо современные материалы и технологии дают нам для этого все больше возможностей.
Другие экзотические беспилотники
----
За новостями летающих беспилотников удобно следить в - подпишитесь на него прямо сейчас, а если пользуетесь Facebook, то подпишитесь также на страницу .









