Как выбор платформы для размещения многолучевого эхолота влияет на разрешение при картографировании
17.01.2026Вашему вниманию - пересказ телеграм-канала SeaRobotics .
Многолучевые эхолоты (MBES / МЛЭ) произвели революцию в картографировании морского дна, обеспечив возможность высококачественных измерений глубины на больших площадях и в широком диапазоне глубин. Однако производительность MBES в значительной степени зависит от платформы, на которой установлена система. Выбор между MBES, установленным на корпусе судна, и MBES, установленным на автономном подводном аппарате (AUV / АНПА) или дистанционно управляемом аппарате (ROV / ТНПА), часто сводится к одному центральному вопросу: каковы требования к разрешению?
В этой статье обсуждается, как разрешение MBES масштабируется с глубиной, почему платформы AUV/ROV могут достигать гораздо большей детализации, какие ограничения характерны для каждой платформы и почему «картографирование, соответствующее назначению» остается важным в современном океанографическом картографировании.
Разрешение и глубины
Системы MBES, установленные на корпусе судна, как правило, на беспилотных надводных аппаратах (USV / БНА), остаются основными рабочими лошадками глобального картографирования морского дна. Благодаря им большая часть из 27,3% площадей дна мирового океана в настоящее время картографирована в соответствии с современными стандартами. Сильные стороны таких решений — их выносливость, охват и эффективность на больших территориях. Однако достижимое боковое разрешение (которое является функцией ширины луча и глубины воды) уменьшается с увеличением глубины и определяется формулой:
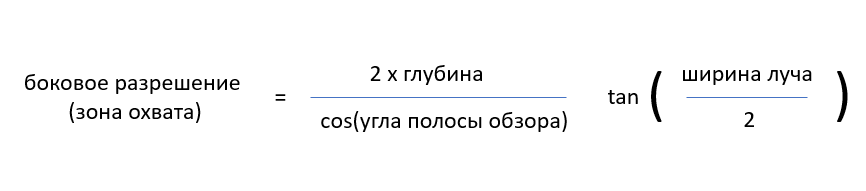
Формула показывает, что боковое разрешение ухудшается с увеличением глубины воды, ширины луча и угла обзора, что приводит к увеличению площади охвата морского дна на глубине.
Для сравнения: на глубине около 4000 м (примерно средняя глубина океана) установленный на корпусе многолучевой эхолот с шириной луча передатчика 2° × приемника 2° может достичь бокового разрешения (площади охвата) ~140 м в надире и ~280 м при угле обзора 60°. Уменьшив ширину лучей до 1° × 1° можно улучшить это значение до ~70 м в надире и ~140 м при угле обзора 60°, но все еще не получится обеспечить тот уровень детализацию, который необходим для многих глубоководных применений. Эта зависимость разрешения от глубины определяет фундаментальное ограничение систем, устанавливаемых на корпусе судна, при их использовании в глубоководных условиях.
Многолучевые эхолоты, установленные на AUV/ROV: высокая детализация за счет приближения
Системы многолучевых эхолотов, устанавливаемые на AUV и ROV, позволяют избежать проблем недостаточного разрешения в условиях глубоководья, поскольку они могут работать гораздо ближе ко дну. Двигаясь над дном на высоте десятков, а не тысяч метров, они могут формировать чрезвычайно малые зоны охвата при той же ширине луча. Поскольку размер зоны охвата пропорционален удалению от объекта наблюдения, AUV или ROV могут картографировать одну и ту же глубоководную область с разрешением в 10-20 раз выше, чем судно или беспилотный надводный аппарат.
Это делает автономные подводные аппараты (AUV) идеальными для решения специализированных задач с высоким разрешением, таких как обнаружение гидротермальных источников, детальное картирование бентосных местообитаний, картирование вулканического рельефа, определение разломов и трещин, подводные археологические исследования, а также инспекция трубопроводов и инфраструктуры. В этих случаях разрешение — это не просто эстетический аспект, оно напрямую определяет, можно ли обнаружить ключевые детали, ради обнаружения которых проводится инспекция.
Ограничения систем многолучевого эхолота (MBES), установленных на AUV и ROV
Несмотря на очевидные преимущества, системы MBES, установленные на AUV и ROV, имеют существенные эксплуатационные и технические ограничения, особенно в отношении точности горизонтального позиционирования, ограниченной продолжительности работы, более низкой скорости съемки и уменьшенного охвата картирования. Например, большинство съемок с использованием AUV полагаются на судно-носитель или автономное надводное судно (ASV) для акустического позиционирования USBL, или требуют использования массива LBL, когда требуется более высокая точность. Это значительно увеличивает время, логистическую сложность и стоимость. Кроме того, установленный на корпусе судна многолучевой эхолот (MBES) на глубине около 200 м может обеспечить полосу обзора около 700 м при угле раскрытия ±60°, в то время как автономный подводный аппарат (AUV), движущийся на высоте 20 м от дна сможет обеспечить полосу обзора лишь примерно в 70 м. Несмотря на превосходную точность картографирования с AUV и ROV, достигаемый показатель «площадь покрытия в час» оказывается значительно меньше.
Эти компромиссы делают установку MBES на AUV или ROV ценным, но не всегда лучшим выбором.
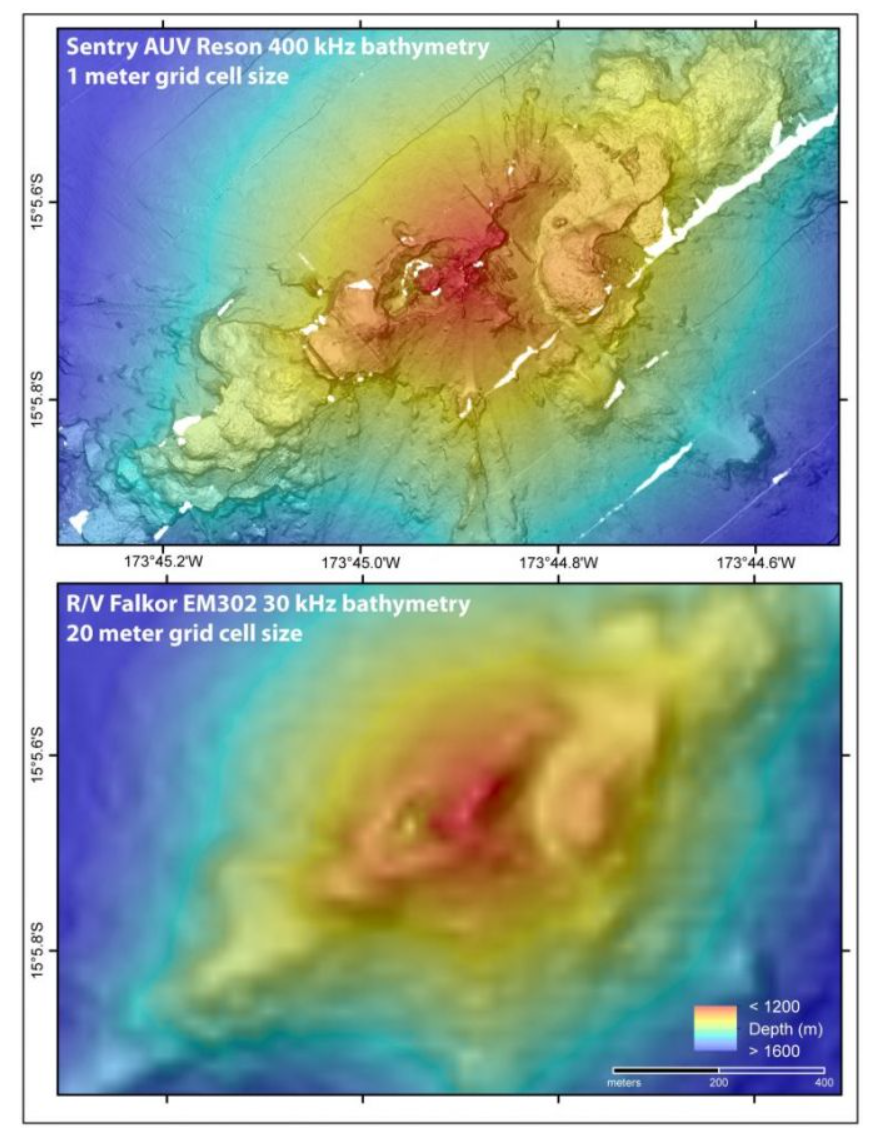
Характеристики морского дна, нанесенные на карту с использованием двух разных многолучевых эхолотов на разных платформах (сверху - установка на AUV Sentry Reson 400 кГц MBES, сетка 1 м; снизу: установка на НАС Falkor EM302 30 кГц MBES, сетка 20 м). Изображение предоставлено Институтом океанографии Шмидта
Примеры различий платформ
Рисунок, предоставленный Институтом океанографии Шмидта, наглядно демонстрирует ситуацию. Один и тот же глубоководный вулканический рельеф был картирован с помощью AUV Sentry с многолучевым эхолотом Reson 400 кГц, работавшего примерно в 70 м над морским дном и создавшего сетку с шагом 1 м, а также с помощью научно-исследовательского судна R/V Falkor с многолучевым эхолотом EM302 30 кГц, работавшим с поверхности, что позволило сформировать сетку с шагом 20 м. Карта, созданная с помощью автономного подводного аппарата, обеспечивает примерно в 20 раз более высокое разрешение, четко отображая такие особенности, как извержения, вулканические кратеры, лавовые потоки, разломы, трещины и оползни — детали, которые невозможно обнаружить с помощью системы, установленной на корпусе судна.
Аналогичный контраст показан на рисунке 2, где оползень на глубине 200 м был картирован как системой, установленной на корпусе судна (примерно в 200 м над дном), так и системой, установленной на автономном подводном аппарате (примерно в 20 м над дном). Десятикратное улучшение разрешения, достигнутое с помощью автономного подводного аппарата (AUV), позволяет запечатлеть едва заметные морфологические особенности оползня, которые практически не обнаруживаются в данных, полученных с помощью судна.
Эти примеры подчеркивают, почему, когда требуется высокая детализация, предпочтительно использовать AUV. Аналогичного уровня разрешения можно достичь, используя многолучевые эхолоты (MBES), установленные на дистанционно управляемых подводных аппаратах (ROV).
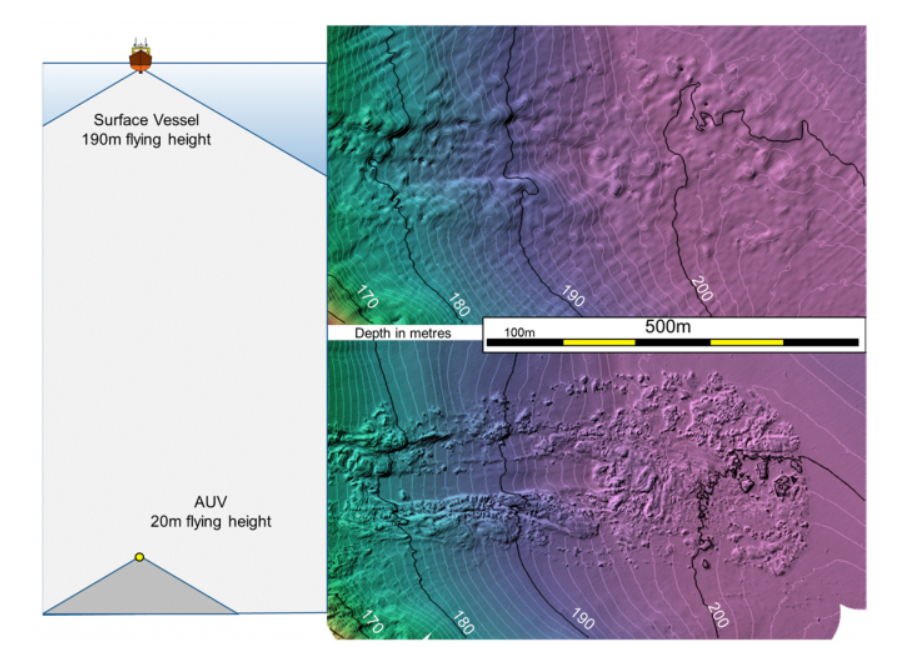
Оползень, нанесенный на карту с помощью многолучевого эхолота, установленного на корпусе судна, и многолучевого эхолота, установленного на AUV. (Источник изображения: Geosciences / John E. Hughes Clarke)
Метод картографирование должен соответствовать поставленным задачам
Значительные различия в разрешении между платформами заставляют задумываться: какое разрешение вам действительно необходимо?
Данные высокого разрешения, полученные при использовании AUV + MBES или ROV + MBES, могут быть кардинально более точными, но это не всегда необходимо. Для многих приложений, включая безопасность навигации, картографирование континентального шельфа, планирование кабельных маршрутов и классификацию местообитаний в широких масштабах, многолучевой эхолот, установленный на корпусе судна или на корпусе USV, обеспечит более чем достаточную детализацию, предлагая при этом непревзойденную эффективность и охват.
Практичная и экономически эффективная стратегия заключается в разумном сочетании технологий:
- Использование MBES, установленного на корпусе обитаемого или безэкипажного судна, подходит для картографирования больших территорий и идентификации объектов или целей, представляющих интерес.
- Развертывание MBES на платформе AUV или ROV - оптимально для целенаправленного высокоразрешающего картографирования приоритетных участков.
Гибридный подход снижает общую стоимость миссии, повышает эффективность и гарантирует выполнение требований как к охвату, так и к детализации.
Таким образом, ответ на вопрос – какая платформа для картографирования будет оптимальной в конкретном случае, зависит от предполагаемого использования данных.
- -