

Роботы на съемочной площадке
01.10.2015В настоящее время роботы широко применяются на съемочных площадках по всему миру. Системы контроля движений камеры используются для обеспечения высокой точности и плавности съемок, повторов траектории движения камеры и создания уникальных эффектов. Беспилотники используют для бюджетных съемок с воздуха. В этом они успешно заменяют дорогие в эксплуатации вертолеты. Роботы нередко применяются в производстве различной кинопродукции. Механизированные аниматронные куклы используют для съемок “несуществующих” объектов. Эта технология пришла на смену покадровой съемке.

Роботизированные системы контроля движения камеры
Появление систем контроля движения камеры (camera motion control systems) стало одной из вех развития технологической составляющей киноиндустрии. Профессиональные устройства контроля включают роботизированную панорамную головку, кран-тележку и операторский кран - три в одном.

Панорамная головка обеспечивает устойчивость и резкость при съемках в труднодоступных местах, повторяемость движений камеры. Роботизированные операторские краны повышают плавность съемки.

Автоматические приводы позволяют оператору дистанционно управлять камерой, заблаговременно программировать траекторию перемещения. Система фиксирует и сохраняет все параметры камеры в конкретный момент времени, включая, в частности, фокусное расстояние и позицию. Сохраненные данные используются для воспроизведения траектории движения камеры. Благодаря этой технологии, можно снимать по-отдельности различные объекты. После комбинирования они выглядят так, словно были сняты в одном и том же месте в одно и то же время.
Вне зависимости от технологии совмещения в одном кадре нескольких изображений, для их последовательной съемки нужно, чтобы камера перемещалась по одной и той же траектории. Человек-оператор справиться с этим может разве что в самых простых случаях, тогда как роботизированной системе по плечу многократное воспроизведение самой замысловатой траектории с одновременным изменением различных параметров.
Первое масштабное применение повтора движений камеры относится к 1975 году. Режиссер "Звездных войн" Джордж Лукас создал ряд эпизодов, в которых модели космических кораблей приближались, “пролетали” мимо и удалялись от камеры, которая разворачивалась за ними на 180 градусов. Возможности подобных съемок были ограничены – не было системы, способной запомнить и точно воспроизвести столь сложные движения камеры. Требовалось создать механизм, который мог бы записывать информацию о траектории камеры и воспроизводить её через несколько дней. Так появилась система Дайкстрафлекс (Dykstraflex), записывающая одновременно скорость движения камеры, её положение, фокусное расстояние объектива, углы поворотов, зум и т.д.
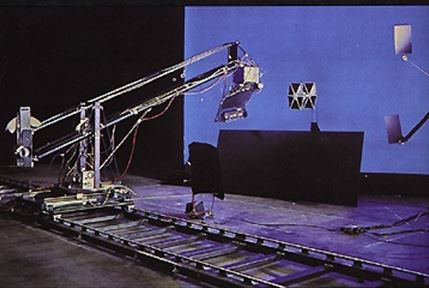
Каждое движение камеры программировалось отдельно: сдвиг вперед, панорамирование, повороты по вертикали. Названная в честь своего разработчика Джона Дайкстра (John Dykstra) установка использовалась, например, для съемок битв между несколькими космическими кораблями. В 1978 году Джону Дайкстра и двум соавторам "Дайкстрафлекс" был вручен Оскар за технические достижения.
Сегодня многие компании производят мобильные и предназначенные для павильонных съемок роботизированные механизмы, управляющие движениями камеры. Технические решения для управления движением камеры, пришли в кинематограф из промышленности, где роботы уже обладали требуемой точностью движений. Современные аппараты могут контролировать и записывать движения по 13 осям, управляют зумом, фокусом и экспозицией.
Специализированные роботы активно используются для съемки сложных рекламных роликов, добавляя им реализма.
Управление некоторыми роботами со временем становится все проще и интуитивнее. К примеру, оператор может просто переместить камеру и “показать” ей движение, которое необходимо воспроизвести. Подобная система “программирования” обеспечивает быструю переналадку робота.
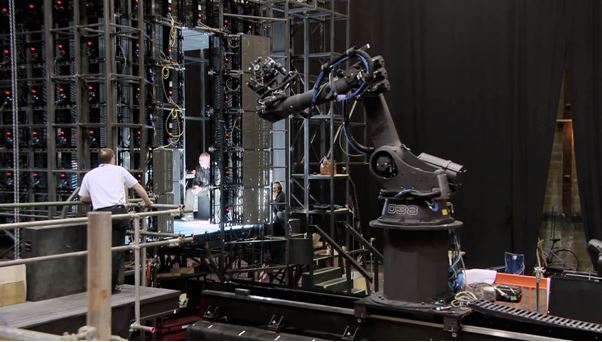
На съемочной площадке фильма "Трансформеры 4: Эпоха истребления" использовался промышленный робот KUKA Robotics, обеспечивающий пространственные перемещения камеры.
Система контроля движения камеры Milo способна двигаться со скоростью более двух метров в секунду, и с высочайшей точностью. Кроме того, система способна автоматически удерживать объект съемки в фокусе.

Роботизированные системы контроля движения камеры серьезно облегчили труд оператора. Например, при съемке погони в пыли и песке, человек может находиться на удалении от робота - с процессом справится автоматика.
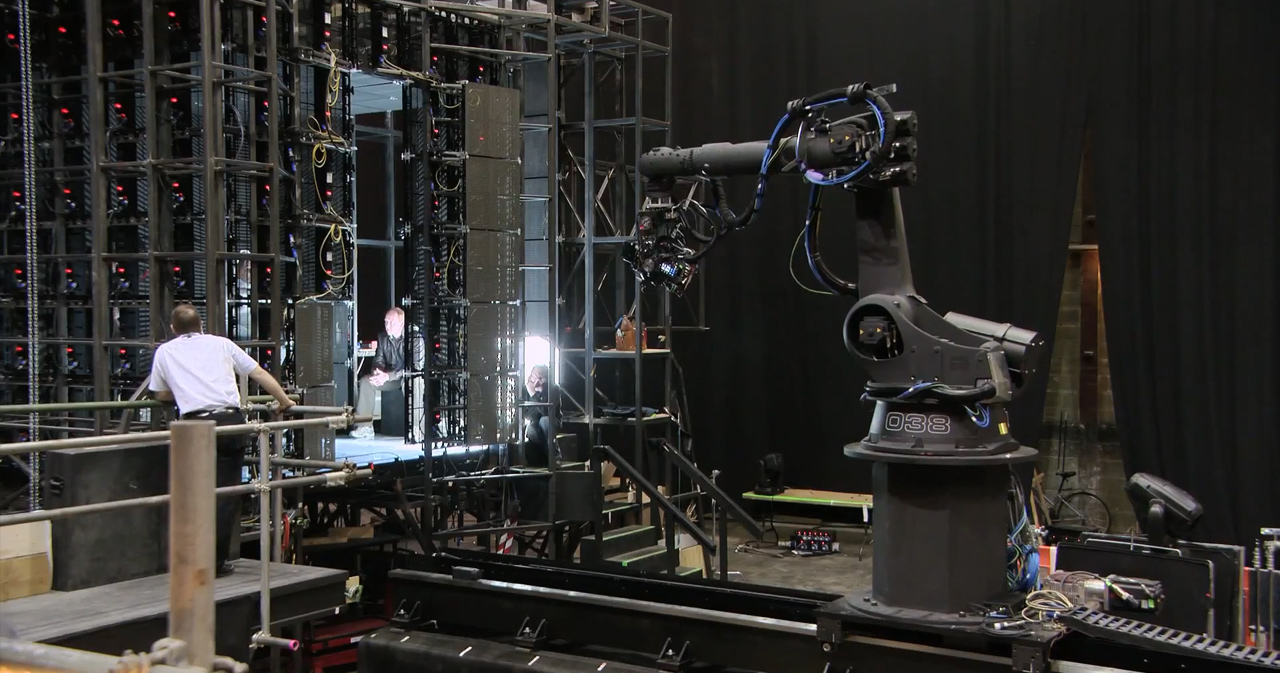
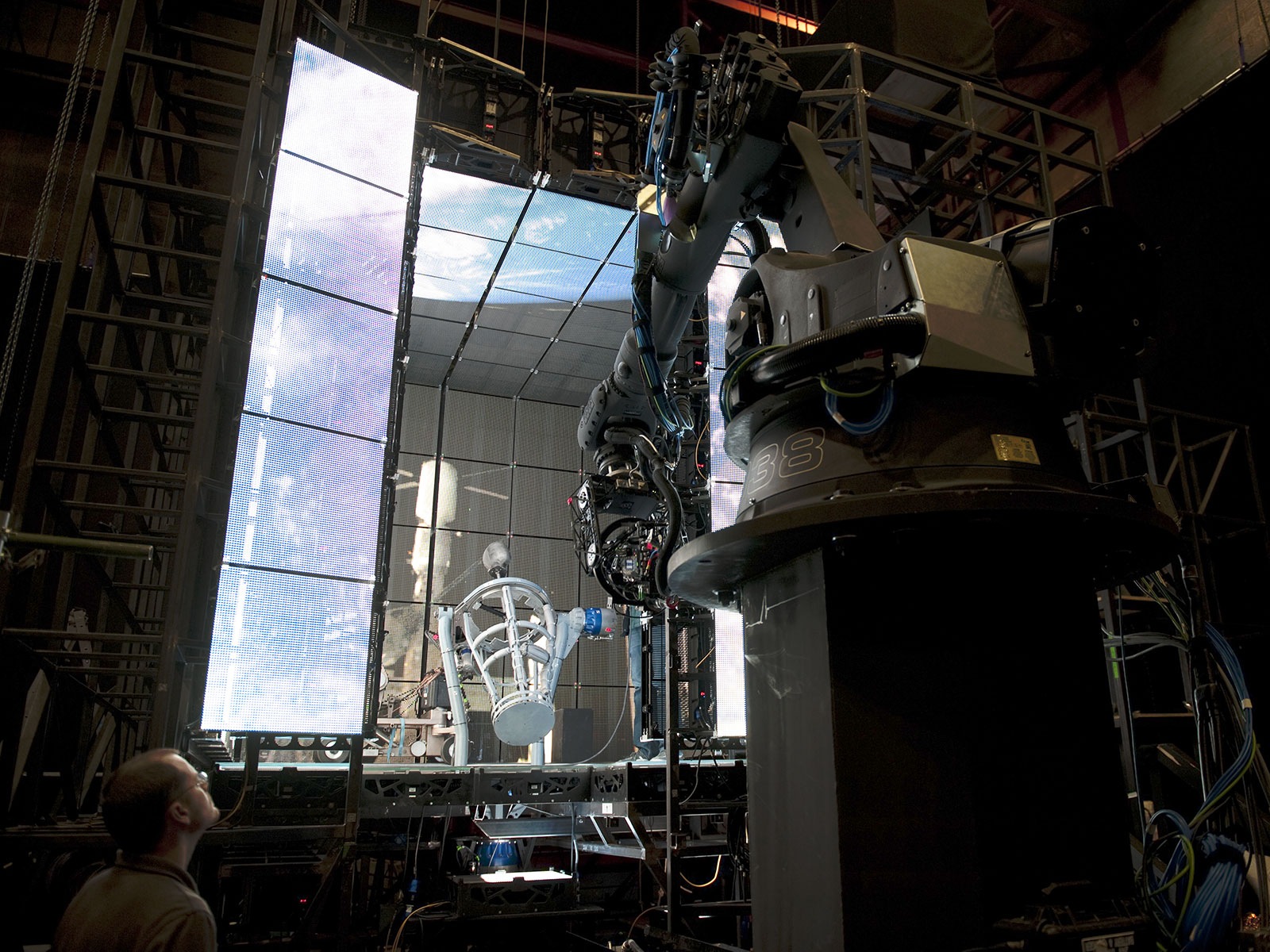
Для съемок фильма "Гравитация" была создана роботизированная система освещения "Light Box" из 196 панелей, на каждой из которых размещалось 4096 светодиодных ламп. Система позволяла мгновенно менять углы освещения, создавая иллюзию смещения актеров относительно источников света и отражающих поверхностей. Каждая сцена синхронизировалась с заранее заготовленной компьютерной графикой, которую проецировали на стены помещения - необходимую точность могли обеспечить лишь роботы.

Съемки с роботов и дронов
На сегодняшний день состоялось несколько кинофестивалей, где можно было посмотреть видеосюжеты, снятые при помощи беспилотных летательных аппаратов. Можно припомнить, например, Нью-Йоркский Drone Film Festival и Flying Robot International Film Festival в Сан-Франциско, а также фестиваль Rise of the Drones, специализирующийся на экстремальных видах спорта.
Использование наземных роботов и летающих дронов при съемках познавательных программ о природе и жизни диких животных не пугает зверей и гарантирует безопасность операторов. Канал National Geographic использовал радиоуправляемых колесных роботов для уникальных съемок львов. Инфракрасные камеры и дроны позволили операторам снимать животных ночью, в период их активности.



Аниматроника
Выход трейлера к фильму "Мир Юрского периода" сопровождался рядом критических отзывов, связанных с тем, что в классической картине 1993 года динозавры выглядели более реалистично. В "Парке Юрского периода" из 14 минут с участием динозавров, лишь в течение 4 минут использовалась компьютерная графика. В остальное время, включая знаменитую сцену с тираннозавром, Стивен Спилберг полагался на аниматронику - методику создания сложных макетов и кукол, покадровая съемка которых неэффективна.
Для фильма было сконструировано несколько полноразмерных телеуправляемых роботизированных динозавров. Мощные гидравлические приводы позволили "ящерам" двигаться и разевать клыкастые пасти. Робот-тираннозавр мог совершать до 57 видов движений. Для управления десятками актуаторов требовалась автоматизированная система. Обычные пульты дистанционного управления не обеспечивали требуемый функционал. Пришлось создать мини-копию динозавра, размером с большую собаку. Ее движениями управляли вручную, а компьютер преобразовывал информацию в управляющие сигналы для актуаторов многотонного рободинозавра.
Некоторые аниматронные модели, использующиеся на съемках, были настолько сложными, что для управления ими требовалось несколько операторов, отвечающих за мимику, движения туловища, лап, челюстей и т.д. При съемке сцены с трицератопсом в "Парке" движения куклы контролировались одиннадцатью людьми, сидящими в яме, вырытой под тушей "животного". Самым маленьким роботом оказался крошечный динозаврик, вылупляющийся из яйца на глазах у ученых. Настоящий шедевр аниматроники - спинозавр из третьего "Парка Юрского периода" - весил 12 тонн.
Кроме динозавров, создаются и другие аниматронные модели, например реалистичная модель младенца. Подобные роботы существенно упрощают съемки - не нужно упрашивать родителей, робот не устает и не капризничает.
Одна из основных проблем использования в кино аниматронных персонажей - недостаток времени для изготовления кукол. В сравнении с компьютерной графикой у аниматроники есть один неисправимый недостаток: многие роботы огромны и обладают значительным весом.
++
С каждым годом роботы занимают все более значимые позиции на съемочной площадке - помогают снимать кино и сами выступают в роли актеров. Нет сомнений, что с каждым следующим годом их роль будет только возрастать, позволяя снимать все более впечатляющие сюжеты, а также упрощая и повышая экономическую эффективность процесса съемок.
Использованные источники и публикации по теме:









