
Голландский квадрупед - робот-гепард. В первом приближении
25.04.2017Самое быстрое животное на Земле, гепард, вдохновил уже не одного робототехника на попытку повторить успехи эволюции "в железе", в виде квадрупеда, т.е. робота с четырьмя конечностями. Одна из последних работ на данную тему – это прототип Geert Folkertsma из университета Твенте (University of Twente) в Нидерландах. Ученый занимался разработкой проекта четыре года. Ему удалось создать робота, который не только способен воспроизвести многие движения реального животного, но и тратит при этом сравнительно немного энергии - лишь на 15% больше, чем живой зверь.
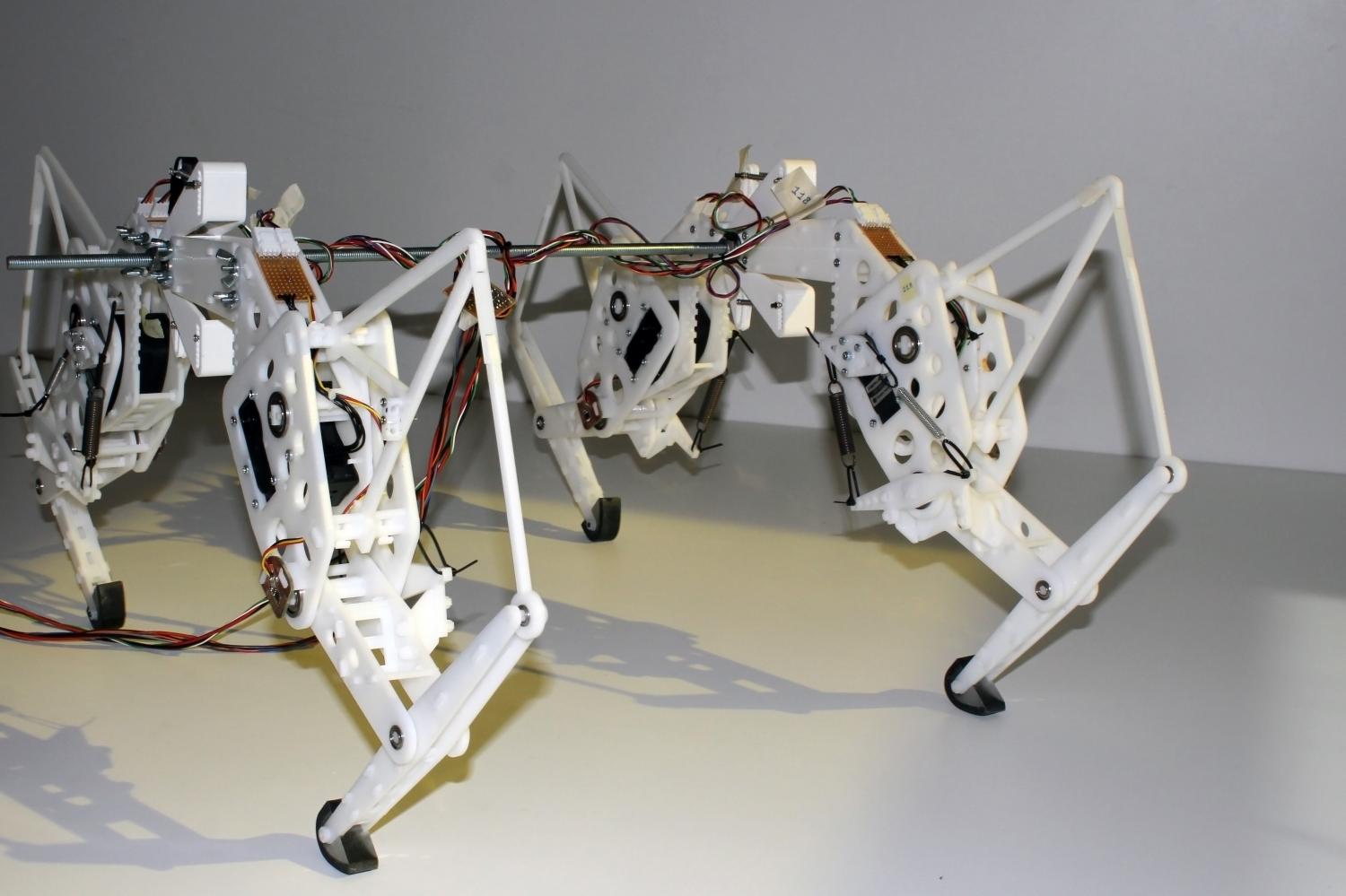
По словам Folkertsma, дизайн его небольшого (30 см в длину) робота основан на глубоком изучении гепардов, на анализе видеозаписей их движений. Применялся бионический подход - изобретатель поставил перед собой задачу создать робота, конструкция которого полностью повторяет скелет, мышцы и суставы животного. Пока что задача решена не полностью - нужно обладать гигантским воображением, чтобы принять скелетообразного робота за пятнистого хищника. Даже если считать, что квадрупед двигается, как настоящий гепард, забраться на дерево он не сумеет. Для и для передвижения по более-менее горизонтальным поверхностям робота снабдили упрощенным пружинным механизмом, а не сложной имитацией мощных лап настоящего гепарда.
Ключевым элементом дизайна является позвоночник робота. Те, кто интересовался строением гепарда, известно, что позвоночник животного действует как пружина, способная сохранять и высвобождать энергию. Изгибая и растягивая позвоночник, животное способно развить скорость до 97 км/ч, а также совершать умопомрачительные прыжки.
«Основное различие между существующими шагающими роботами и моим роботом-гепардом – это конструкция позвоночника», - говорит Folkertsma. - «Хитрость в том, чтобы подражать природе, не усложняя конструкцию без надобности. Вместо позвонков и межпозвонковых дисков, мы работали с пружиной, которая обеспечивает примерно тот же эффект. Также гепарды способны хранить большое количество энергии в мышцах. Подражая этому, мы использовали пружины и в ногах нашего робота».
«Гепард не только умеет бегать быстрее всех на свете, - напоминает Folkertsma, - он вдобавок расходует энергию самым эффективным способом».
Квадрупед весит всего 2,5 кг, что в 20 раз легче, чем его живой прообраз. К тому же робот в четыре раза меньше. Если учитывать эту разницу, то получится, что робот использует только на 15 процентов больше энергии, чем живой гепард. Достижимая квадрупедом скорость не впечатляет - около 1 км/ч.
Изобретатель намерен еще поработать над конструкцией ног, чтобы добиться скорости в 20 км/ч, тогда, с учетом соотношения размеров, можно будет говорить о том, что достигнут то же соотношение размер/скорость, что и у настоящего гепарда. Давайте дождемся этого момента.
А пока что мне вспоминается другой квадрупед - Minitaur. Возможно его разрабатывали без оглядки на гепарда. И возможно он не столько энергоэффективен. Но, похоже, он заметно быстрее.
Скорость - не единственное полезное качество «гепарда». Folkertsma считает, что разработанное им устройство может стать первым из новых, менее громоздких, легко и плавно перемещающихся, потребляющих мало энергии роботов. Такие роботы пригодятся в домашнем хозяйстве, а также в процессе реабилитации пациентов, например, при создании современных протезов.
+ +









