
Подводная добыча ресурсов
Подводная добыча
Канада
Impossible Metals, Канада
Eureka III, Impossible Metals, Канада
2024.07 Планируется создание и испытания до 2027 года. Далее в планах - постройка флота из 20 таких роботов. | Robotrends
Eureka II, Impossible Metals, Канада


2024.05.13 В 2024 году прототип Eureka II работал уже на глубине более 1 км у побережья Флориды, . | Robotrends
Eureka 1, Impossible Metals, Канада

2022.12.25 Прототип АНПА Eureka 1, разработанный американской компанией Impossible Metals, успешно провел экспериментальную выборочную добычу редкоземельных металлов под водой, не причиняя вреда биому. Речь идет о предложении по наиболее экологичной добыче полиметаллической морской руды, когда робот плывет на расстоянии от дна и деликатно подбирает манипуляторами лишь конкреции без видимых признаков жизни. Оснащенный единственным манипулятором Eureka 1 прошел испытания на малой глубине в 25 метров – масштабное развертывание подобных систем ожидается не раньше 2026 года.
Nautilus Minerals и Soil Machine Dynamics, Канада

2016.01.05 Роботы найдут золото на дне океана - в гидротермальных источниках
Китай
Шанхайский университет Цзяотун, Китай

2024.07.09 Китайская глубоководная горнодобывающая машина большой грузоподъемности Pioneer II завершила морские испытания на глубине более 4 000 метров. Это прототип подводного горнодобывающего комплекса, разработанный Шанхайским университетом Цзяотун. В ходе испытаний, которые проходили на глубинах более 4 км (максимально – 4102,8 м), китайский аппарат выполнил 5 операций по погружению и добыче полезных ископаемых. Проводилось бурение и добыча различных видов глубоководных ископаемых, сообщили .
Объединенное королевство
GSR Oceanic, Великобритания



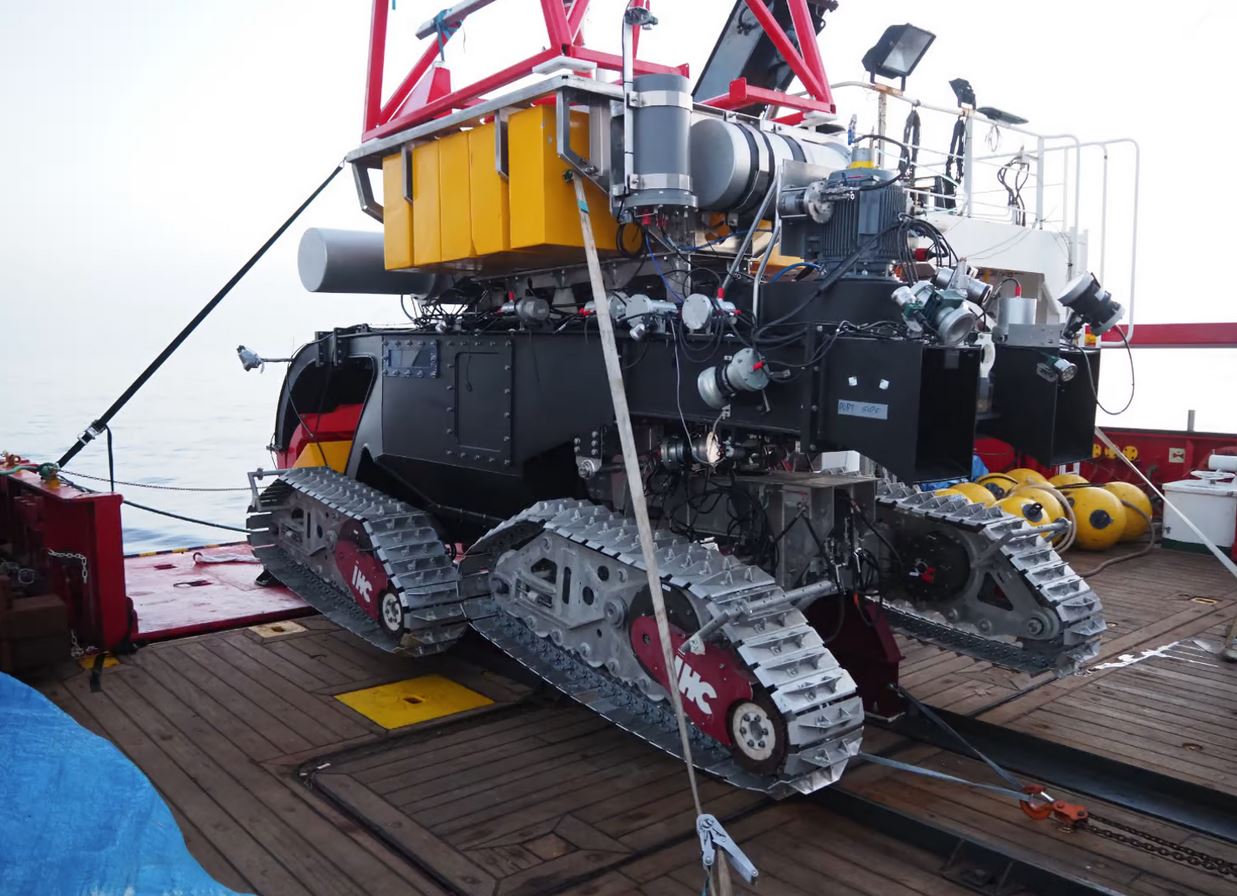
Patania II, GSR Oceanic, Великобритания
2023 Робот Patania II создан основанной в 2010 году компанией GSR Oceanic и предназначен для глубоководной добычи минералов. Проектированием и постройкой робота, изготовлением и установкой электроники, приборов и гидравлики занималась компания Seatools. Глубина погружения - до 6 000 метров. Масса - 35 тонн. Робот оснащен манипуляторами, позволяющими собирать минералы с морского дна, камерами и сенсорами для ориентирования в окружающей среде. В 2022 году робот прошел ряд испытаний, в чвастности, в августе 2022 года он был испытан в Атлантическом океане, где он собирал кобальт на глубине 3000 метров. В мае и в сентябре 2021 года и в сентябре 2022 года прошли испытания робота в Тихом океане, здесь он собирал медь на глубине 5000 метров. В 2019 году компания разработала первого робота для глубоководной добычи минералов - Patania.
Коммерческая доступность робота Patania IIожидается в 2023-2024 году.
Международный проект
Blue Harvesting, 5 стран
Apollo-2, Blue Harvesting
2022 Робот Apollo-2 для сбора самородков длиной до 14 см. Время проектирования робота - 2.5 года. Оснащен гусеничной системой передвижения. Гидравлическая система сбора конкреций - манипуляторы. Высота - 4 метра, длина - 12 м, ширина - 6 м. Вес - до 100 тонн. Состоит из подводного аппарата, отвечающего за перемещения, и "добывающего модуля", оснащенного манипуляторами, которые собирают самородки. Робот минимизирует "облако отложений". Испытания проводились возле Малаги, Испания, на глубине около 300 м. Аппарат показал эффективность во время испытаний, причем больших "пылевых шлейфов" он не создавал. Его собирались испытывать в Атлантическом океане уже на больших глубинах. Планы начала коммерческого использования - с 2025 года.
Новости
2022.12.25 Прототип АНПА Eureka 1, разработанный американской компанией Impossible Metals, успешно провел экспериментальную выборочную добычу редкоземельных металлов под водой, не причиняя вреда биому. Речь идет о предложении по наиболее экологичной добыче полиметаллической морской руды, когда робот плывет на расстоянии от дна и деликатно подбирает манипуляторами лишь конкреции без видимых признаков жизни. Оснащенный единственным манипулятором Eureka 1 прошел испытания на малой глубине в 25 метров – масштабное развертывание подобных систем ожидается не раньше 2026 года.
2018 Робот Apollo-2 для сбора самородков длиной до 14 см. Время проектирования робота - 2.5 года. Оснащен гусеничной системой передвижения. Гидравлическая система сбора конкреций. Робот минимизирует "облако отложений". Испытания проводились возле Малаги, Испания, на глубине около 300 м. Аппарат показал эффективность во время испытаний, причем больших "пылевых шлейфов" он не создавал. Его собирались испытывать в Атлантическом океане уже на больших глубинах.
2016.01.05 Роботы найдут золото на дне океана - в гидротермальных источниках
Смотрите связанные статьи Robo-педии:
Публикации по теме:
 27.04.2026 Рой роботов на дне океана - в шаге от реализации
27.04.2026 Рой роботов на дне океана - в шаге от реализации 19.01.2026 Китай испытал автономного робота для бурения на глубине более 1200 метров
19.01.2026 Китай испытал автономного робота для бурения на глубине более 1200 метров 10.01.2026 Китайская активность в глубоководной добыче трансформирует глобальные цепочки поставок
10.01.2026 Китайская активность в глубоководной добыче трансформирует глобальные цепочки поставок 09.01.2026 Япония на пороге глубоководной добычи редкоземельных элементов с помощью робототехники
09.01.2026 Япония на пороге глубоководной добычи редкоземельных элементов с помощью робототехники 26.07.2024 Impossible Metals успешно испытала прототип глубоководного автономного робота для деликатного сбора конкреций
26.07.2024 Impossible Metals успешно испытала прототип глубоководного автономного робота для деликатного сбора конкреций 25.12.2022 Eureka 1 – АНПА для “деликатного” сбора редкоземельных металлов с морского дна
25.12.2022 Eureka 1 – АНПА для “деликатного” сбора редкоземельных металлов с морского дна 05.01.2016 Роботы найдут золото на дне океана - в гидротермальных источниках
05.01.2016 Роботы найдут золото на дне океана - в гидротермальных источниках









