
Подводные роботы для работы на дне
Подводные роботы для работы на дне -- Каталог подводных роботов
Среди роботов для работы на дне можно выделить несколько категорий: научные мобильные роботы, способные ходить или ползать по грунту; стационарные роботы, например, подводные роботы-ангары; роботы для подводной добычи (подводные бурильные установки, подводные шагающие экскаваторы и другая добывающая техника).
Научные мобильные роботы, способные перемещаться по грунту
Как правило, используются в научных целях, для изучения поверхности дна, а также для наблюдения за морской флорой и фауной, забора образцов грунта или породы. В отличие от "классических" ТНПА с нулевой плавучестью, эти аппараты перемещаются не с помощью трастеров, а ходят по дну, как ракообразные или ползают, как змеи.
Такой подход позволяет им поднимать завесу из частиц донных отложений, что характерино для плавающих роботов, пытающихся работать у самого дна. Эти устройства меньше пугают рыб и других морских обитателей. С таких платформ легче отбирать пробы донного грунта.
KIOST, Южная Корея
Корейский институт технологий и океанологии (KIOST) с 2011 года работал над созданием Crabster, робота гексапода, предназначенного для океанографических исследоваий. Нестандартная конструкция движетеля робота предназначена для решения проблем винтовых ROV, поднимаемых со дна облаков ила. Задача робота - изучение подводных разломов.
Школа перспективных исследований им. св. Анны (Джиакомо Пикарди и его коллеги), Италия
Silver2
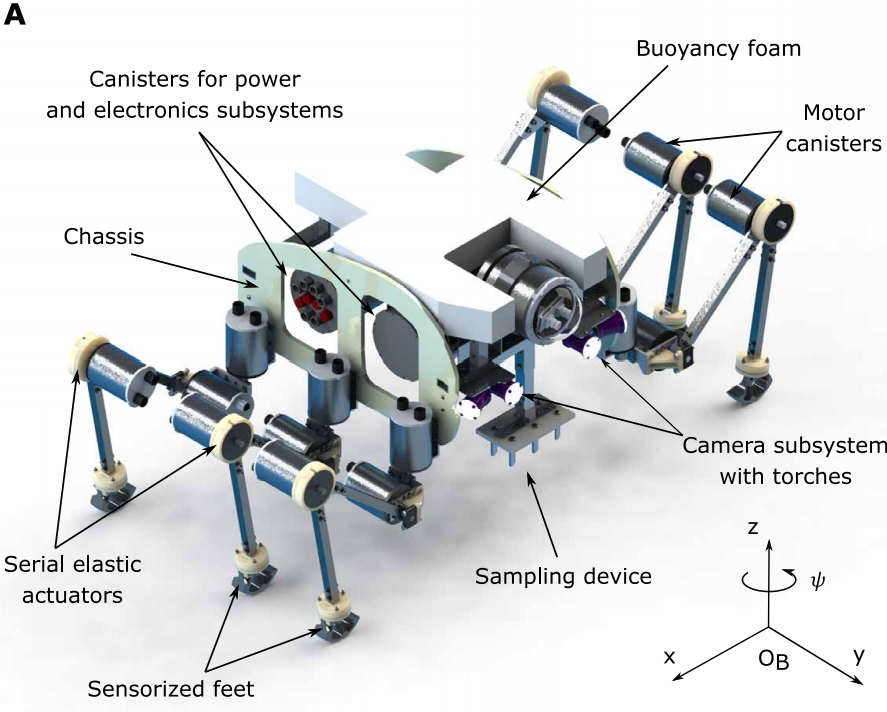
Картинка: Picardi et al. / , 2020

В 2020 году стало известно о готовности еще одного робота-краба, предназначенного для исследований морского дна. Это ТНПА, телеуправляемый подводный робот, сравнительно небольшое устройство размерами 60х35 см. Возможности сбора информации обеспечивают две камеры и сенсоры на "ногах". Робот оснащен устройством забора образцов грунта.
Этот научный робот может ходить по морскому дну с помощью трех пар длинных суставчатых ног, способных перемещать робота над небольшими препятствиями с высотой уступов до 10 см.
Выбранный форм-фактор позволяет роботу подолгу оставаться на одном месте, он практически не зависит от подводных течений. В отличии от неустойчивых в воде ТНПА, стоящему на грунте роботу гораздо проще справляться с забором образцов грунта.
Связь с роботом и управление им осуществляются с пульта ДУ, человеком на борту судна сопровождения. Связь идет по радио между ДУ и плавучим буем, далее сигналы передаются на робота на дне по кабель-тросу. На робота может устанавливаться дополнительная полезная нагрузка, например, буры и манипуляторы.
2020.05.20 Робот-краб поможет исследовать морское дно /
Стационарные подводные роботы
- cоставные элементы подводных сетей навигации и связи для облегчения позиционирования подводных роботизированных объектов под водой и связи подводных роботов с командными пунктами.
- элементы подводных систей акустического обнаружения - своего рода сеть из донных установок, занимающихся пассивным или активным мониторингом акустической обстановке под водой, на ее поверхости и в воздушном пространстве над поверхностью моря в контролируемом районе.
- подводные электростанции - обеспечивают выработку электроэнергии за счет использования подводных течений
а) для обеспечения питанием систем подводного наблюдения, например, акустических допплеровских измерителей течения, сейсмографов и т.п.
б) для береговой сети промышленного тока - роботизированные подводные ангары. Могут оснащаться собственными источниками энергии и служить базами для проведения ТО и подзарядки других подводных роботов, что повышает их период автономного действия под водой без необходимости всплытия.
- устройства роботизированной добычи природных ископаемых на шельфах
Малахит (АО СПМБМ Малахит, Санкт-Петербургское морское бюро машиностроения Малахит им. ак. Н.Н.Исанина, входит в ОСК), Россия, С.Петербург
Разработка подводных лодок, включая атомные, а также глобоководного аппарата Консул

Демонстратор многофункционального подводного ангара, 2019 год.
Китай
Шанхайский университет Цзяотун, Китай

2024.07.09 Китайская глубоководная горнодобывающая машина большой грузоподъемности Pioneer II завершила морские испытания на глубине более 4 000 метров. Это прототип подводного горнодобывающего комплекса, разработанный Шанхайским университетом Цзяотун. В ходе испытаний, которые проходили на глубинах более 4 км (максимально – 4102,8 м), китайский аппарат выполнил 5 операций по погружению и добыче полезных ископаемых. Проводилось бурение и добыча различных видов глубоководных ископаемых, сообщили .
Подводная добыча
Смотрите связанные статьи Robo-педии:
Смотрите связанные статьи Robo-педии:
Публикации по теме:
 13.04.2026 Аэрощуп + ТНПА: новый шаг в очистке морского дна от нефти
13.04.2026 Аэрощуп + ТНПА: новый шаг в очистке морского дна от нефти 27.02.2026 Гигант T3600 готов к оснащению механизмами
27.02.2026 Гигант T3600 готов к оснащению механизмами 13.01.2026 Траншеекопатель и ROV компании SMD закупили заказчики из Азии
13.01.2026 Траншеекопатель и ROV компании SMD закупили заказчики из Азии 25.12.2022 Eureka 1 – АНПА для “деликатного” сбора редкоземельных металлов с морского дна
25.12.2022 Eureka 1 – АНПА для “деликатного” сбора редкоземельных металлов с морского дна 05.01.2016 Роботы найдут золото на дне океана - в гидротермальных источниках
05.01.2016 Роботы найдут золото на дне океана - в гидротермальных источниках









