
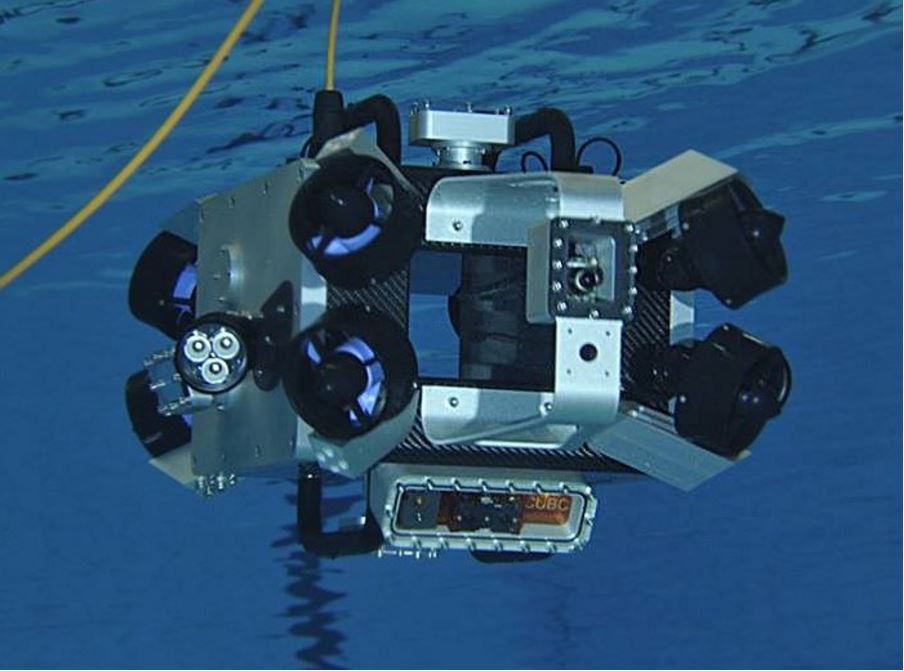
В Швейцарии разрабатывают многофункциональный подводный дрон
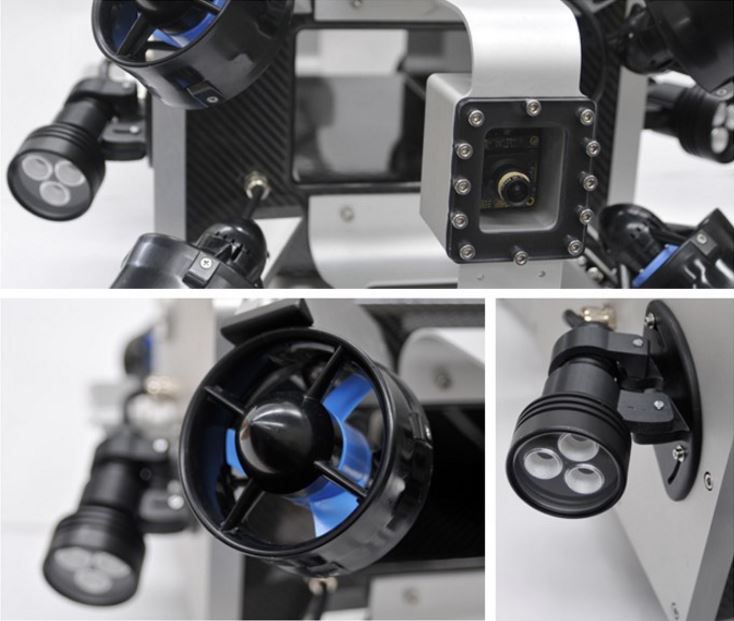
15.06.2016В Швейцарской высшей технологической школе Цюриха разработали подводный дрон под названием Scubo на основе платформы Arduino. Устройство оснащено шестью камерами и может двигаться в любом направлении. Для работы дрона используется микроконтроллер Arduino Due, миниатюрный компьютер Intel NUC для высокопроизводительных расчетов, IMU-сенсор и датчики давления.
Устройство готово к использованию и может выполнять ряд задач, в том числе и тех, что требуют полной автономности. Робота можно, например, запрограммировать на самостоятельное сканирование кораллового рифа. Режим телеприсутствия, в том числе с поддержкой очков дополненной реальности, может понадобиться для мониторинга крупных аквариумов, дельфинариев и океанариумов - а также любителям подводной съемки. Система построена по модульному принципу, отдельные части можно заменять для оптимальной поддержки той или иной миссии. В зависимости от полезной нагрузки, Scubo может составить карту дна океана (даже трехмерную модель!) или совершить наружный осмотр морского судна.
К дрону можно, при желании, прикреплять дополнительные камеры и источники света, а также всевозможные сенсоры. Учитывая гибкость платформы Arduino, легкость её освоения с нуля и обилие решений, формируемых коммьюнити, можно предположить, что в ближайшем времени для Scubo могут появиться модули, о возможности создания которых разработчики не догадывались.
Ассортимент подводных роботов, как автономных, так и телеуправляемых, постоянно расширяется, как и их возможности. Глубоководные аппараты и глайдеры, устройства, оснащенные винтами, плавниками или водометами, предназначенные для любительских подводных съемок и профессиональных изысканий - появляются все новые автономные и телеуправляемые подводные роботы.









