
Конспекты: Коллаборативные роботы. Исследования, технологии и приложения
30.04.2017Конспект доклада "Коллаборативные роботы. Исследования, технологии и приложения" с которым выступил Майкл Хофбаур (Michael Hofbaur), глава исследовательской группы в инновационно-исследовательской компании JOANNEUM RESEARCH Forschungsgesellschaft mbH (Австрия) и Гельмут Вайденхофер, директор департамента стратегический исследований JOANNEUM RESEARCH Forschungsgesellschaft mbH (Австрия). Автор конспекта - Алексей Бойко, RoboTrends.ru.

+
Коллаборативные роботы
Традиционные промышленные роботы, как известно, работают в клетках (ячейках), огороженных так, чтобы исключить присутствие в них человека из соображений безопасности. Вместе с тем, просматривается множество приложений, когда использование ячейки - невозможно или является нежелательным.
Концепция, подразумевающая, что роботы и люди работают "рука об руку", - не нова. В частности, существует международный стандарт ISO 10218, где понятие "Колаборативность" определено так: "Состояние в котором специально разработанный робот работает в прямом взаимодействии с человеком в определенной рабочей зоне". Речь не идет о том, что все роботы должны соответствовать требованиям этого стандарта, это требования лишь для класса роботов, которые принято называть коллаборативными роботами (сокращенно - коботами).
Безопасность на первом месте!
однако:
Новые разработки в области робототехники и технологий позволяют создавать самые разные приложения, основанные на такой концепции, как коллаборативность.
+
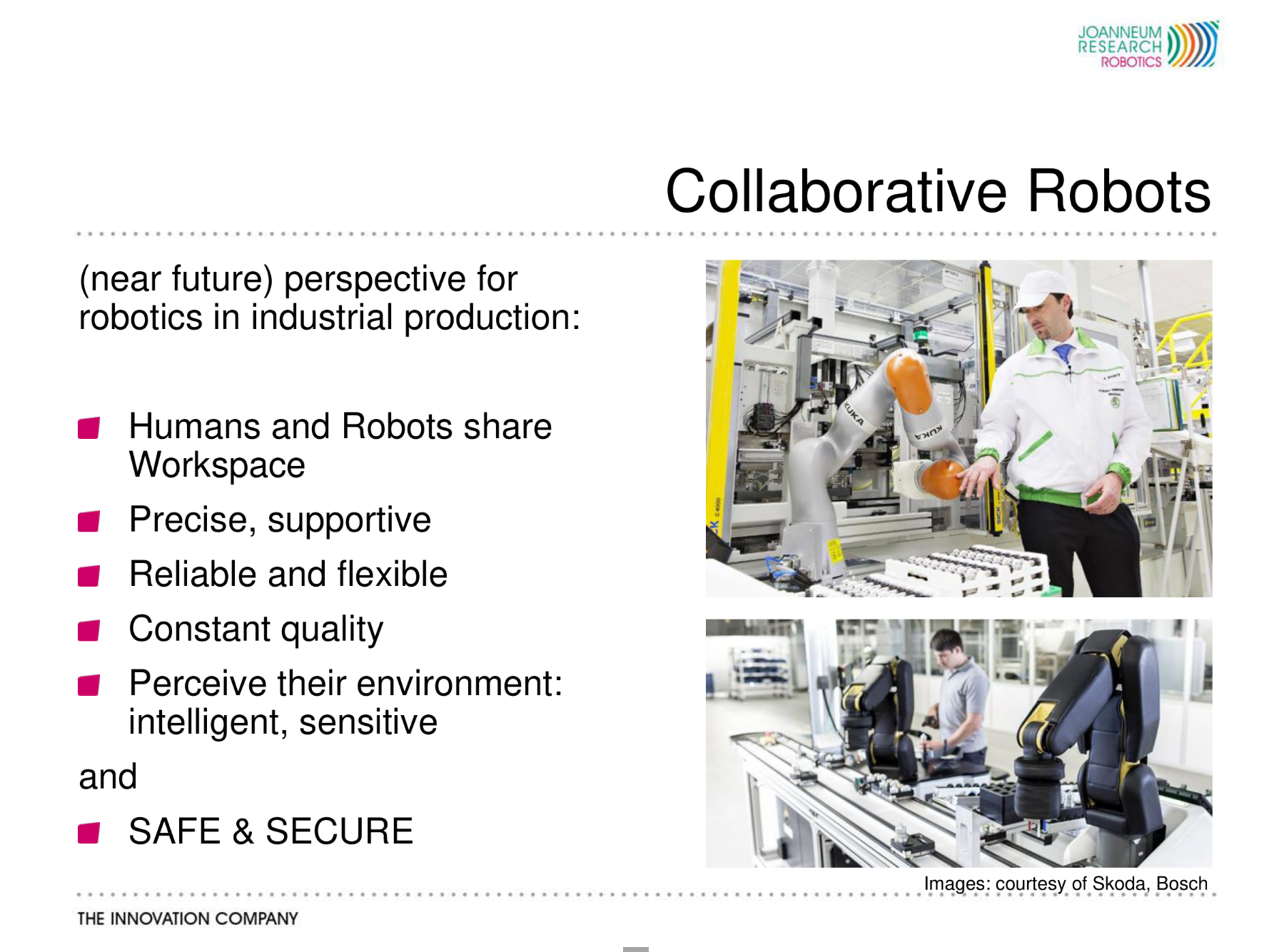
Перспективы ближайшего будущего для робототехники в области промышленного производства.
- Люди и роботы работают в одном рабочем пространстве
- Точные и готовые помочь
- Надежные и гибкие
- Постоянное качество
- Ощущают внешнюю среду: аккуратные, чувствительные и
- Безопасные и защищенные
(фото - коллаборативные роботы на заводах Skoda и Bosch).
Работая рядом с человеком, коллаборативные роботы зачастую играют роль "третьей руки", поднимая или перемещая в заданную точку, поворачивая необходимым образом те или иные предметы, с которыми человек совершает те или иные манипуляции. Робот может облегчать работу человека, к тому же он выполняет операции с высокой точностью и постоянным качеством. За счет способности робота воспринимать окружающую среду, он хорошо "понимает" то, что от него требуется человеку, заменяя во многих случаях человека-напарника.
Важным при этом является то, чтобы добиться от робота не только высокой безопасности, чтобы он при своей работе не создавал угрозы человеку-напарнику, но также чтобы его ПО и управление были защищенными от несанкционированного воздействия, взлома. Поскольку если к управлению роботом получат доступ несанкционированные на то лица, он теоретически может стать источником опасности для работающего с ним рядом человека, если кто-то, например, отключит встроенные системы безопасности робота.
+
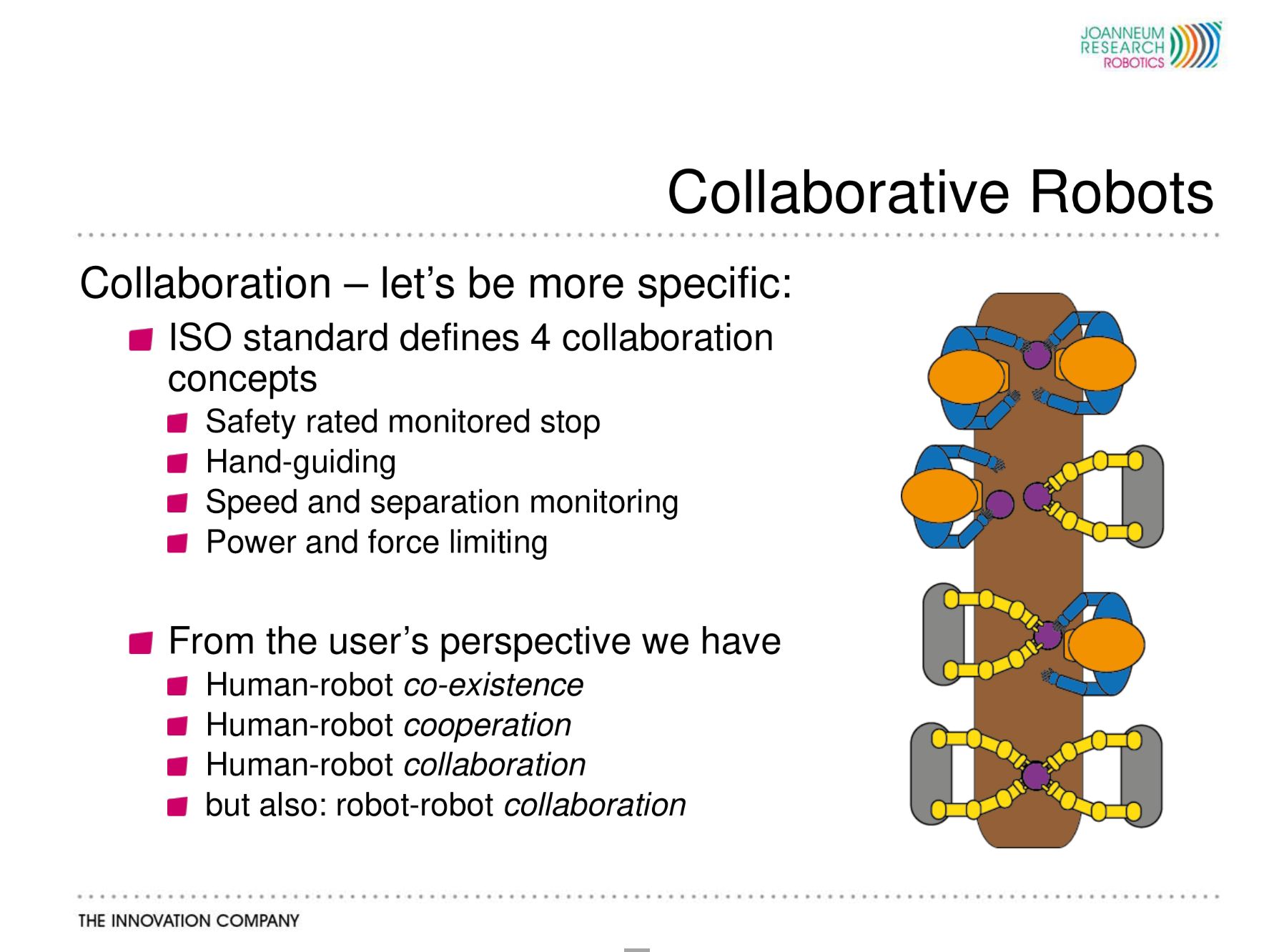
Давайте более детально разберемся с определением коллаборативности:
- Стандарт ISO определяет 4 концепции коллаборативности
- Экстренный останов по соображениям безопасности
- Режим "программирования" за счет показа роботу движений (free-drive)
- Мониторинг скорости и за отсутствием столкновений
- Ограничения по мощности и развиваемым усилиям
- С точки зрения пользователя мы имеем дело с различными режимами взаимодействия:
- Со-существование "человек-робот"
- Кооперация "человек-робот"
- Коллаборация "человек-робот"
- но также "коллаборация робот-робот"
Коллаборативный робот - это не только "третья рука" для человека, это также робот, работающий рядом с человеком, в тандеме с человеком или в единой цепочке с человеком, и, наконец, это может быть работа нескольких роботов в едином процессе, где роботы безопасно взаимодействуют друг с другом за счет реализации принципов коллаборативности.
+
Технологии коллаборативных роботов
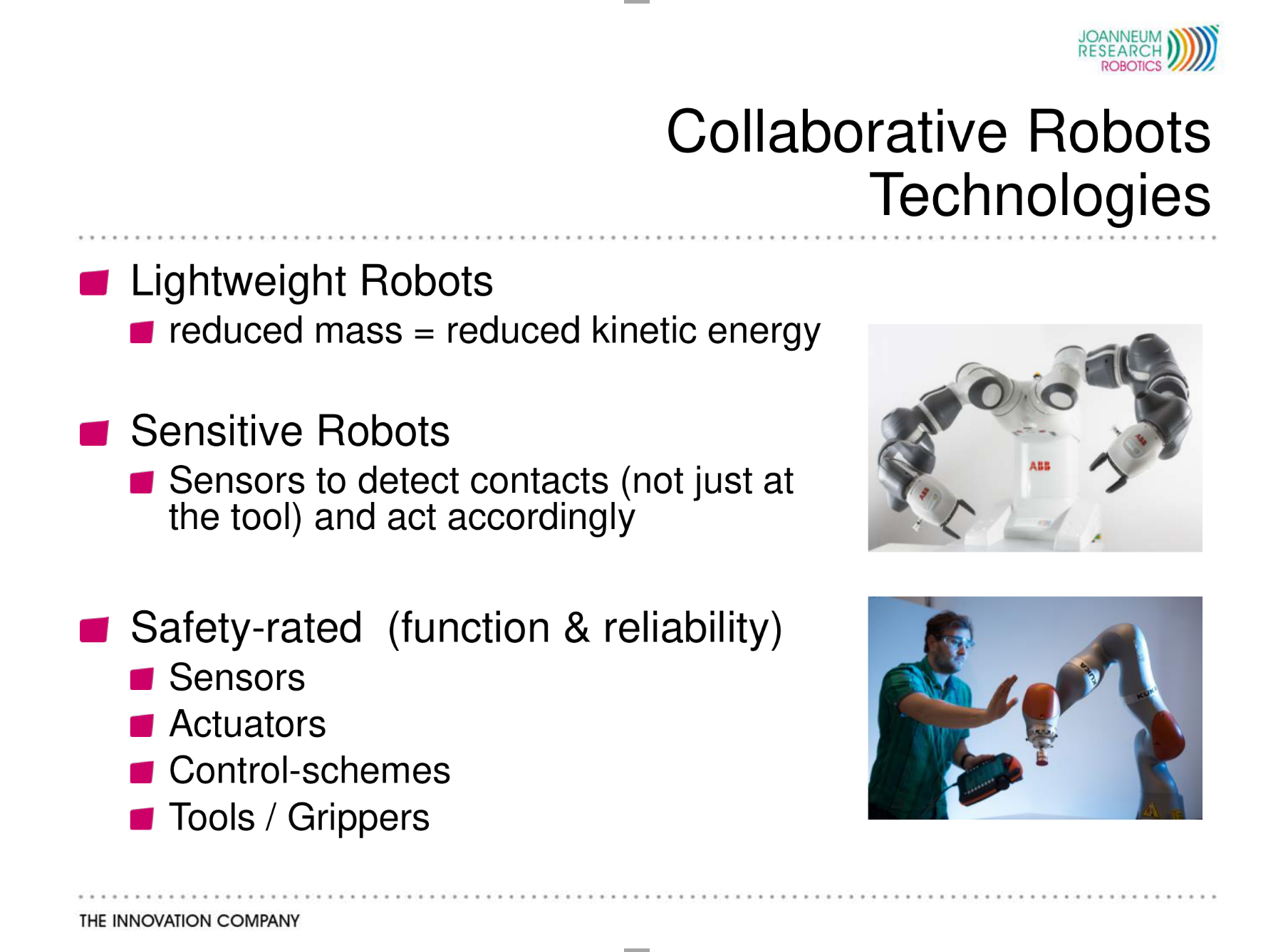
- Легкие роботы
- снижение массы = сокращение кинетической энергии
- Чувствительные роботы
- Сенсоры для детектирования контактов (не только на инструменте) и действия в соответствии с получаемыми данными
- "Завязанные" на безопасность (функциональность и надежность)
- Сенсоры
- Актуаторы
- Управляющие цепи
- Инструменты / Хваты
Традиционные промышленные роботы обычно весят примерно в 10 раз больше, чем максимальный вес грузов, с которыми они способны манипулировать. Это необходимо для того, чтобы справляться с возникающей при движениях такого робота кинетической энергией. Коллаборативные роботы могут весить намного меньше, посколько они медленнее двигаются и при их движении возникает меньшая кинетическая энергия. Промышленный робот практически нельзя остановить мгновенно, коллаборативный рассчитывается с учетом возможности таких остановок. И не только остановок. Если робот "замечает" человека в опасной столкновением близости, он может предпринять различные меры, чтобы минимизировать риск столкновения. Например, временно снизить скорость своего движения, повысить чувствительность системы аварийного останова к возможным пикам по току питания (такие пики возникают, когда робот сталкивается с препятствием), или, скажем, изменяет траекторию движения манипулятора, чтобы изменить границы своей рабочей зоны так, чтобы человек вновь оказался за пределами этой зоны.
Другая особенность из-за которой коллаборативные роботы далеко не сразу появились на рынке - от них требовалось соответствовать жестким требованиям по безопасности для человека. Причем это касалось не только механизмов робота и его ПО, но также и требований к отказоустойчивости сенсоров, актуаторов, захватов, управляющих цепей и инструментов, используемых роботом.
+
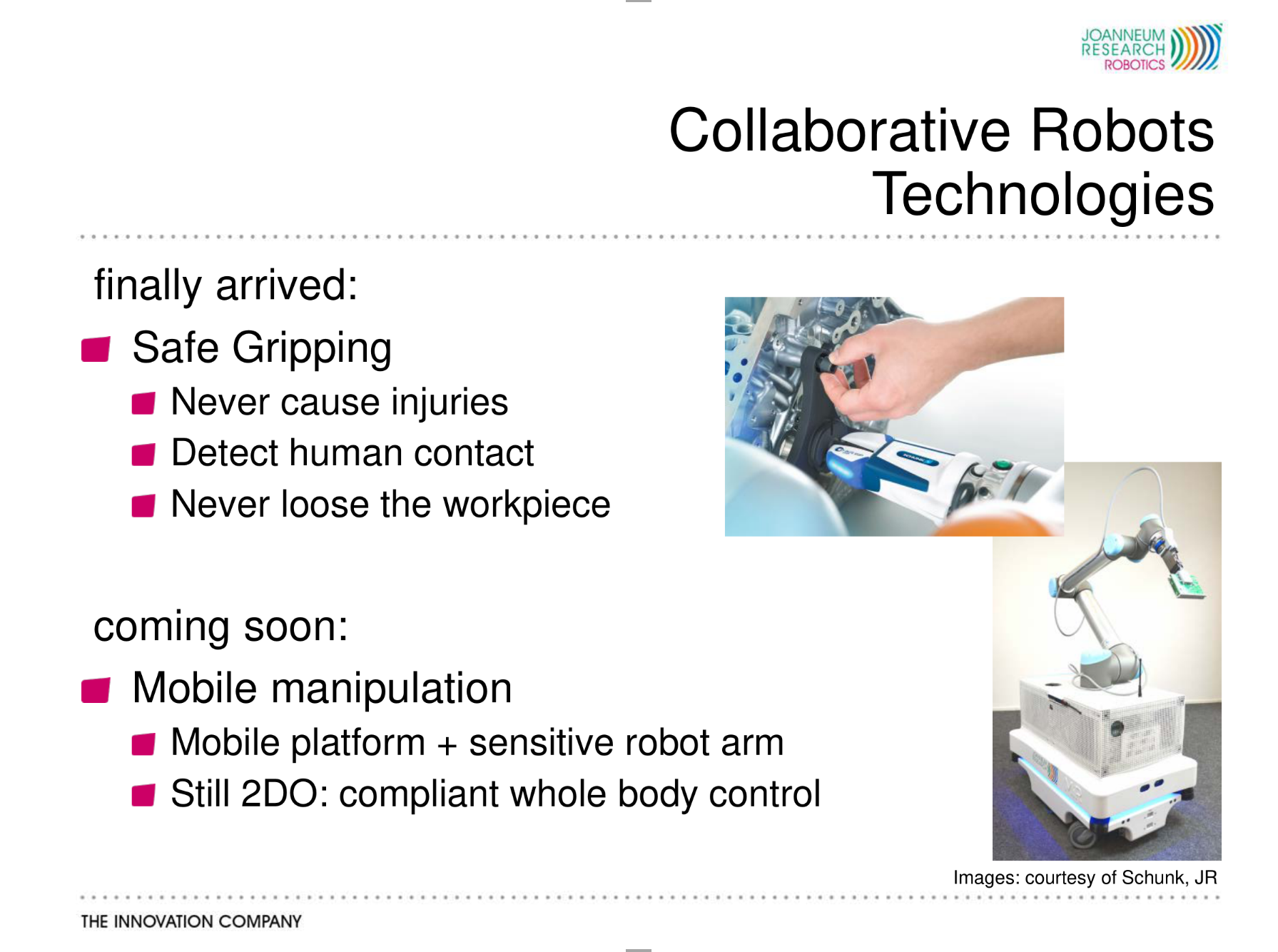
- Уже появились на рынке
- Безопасные хваты
- Никогда не приведут к травмам
- Замечают контакт с человеком
- Не выходят за заданные границы рабочего пространства
- Вскоре ожидается появление
- Мобильные коллаборативные манипуляторы
- Мобильная платформа + чувствительная робо-рука
- Все еще только в планах разработки: "совместимое" управление всем телом
Долгое время коллаборативные роботы нельзя было называть безопасными, они были безопасными только до запястья или до руки, но не до пальцев и, тем более. инструмента. Лишь сравнительно недавно стали появляться захваты, спроектированные с учетом требований безопасности. Также долгое время проблемой оставалось то, что робот нередко ронял захватываемые им предметы, что также не добавляло безопасности.
Другой проблемой было то, что если человек без труда может перемещаться от одного рабочего места к другому, с коллаборативными роботами, несмотря на их удобство, добиться такого эффекта на первых порах возможность не предусматривалась. Постепенно выявилась потребность в том, чтобы эти манипуляторы были мобильными, чтобы можно было без труда перевести робота на другой участок работы, где сейчас требуются его усилия. Сейчас несколько компаний ведут такие разработки. Проблема в том, что люди, привыкшие легко управлять положением руки коллаборативного робота (в режиме free-drive обучения), уже хотят, чтобы и платформа обладала схожей функциональностью, чтобы двигать ее было столь же легко, несмотря на внушительный вес, которым она неизбежно должна обладать.
+
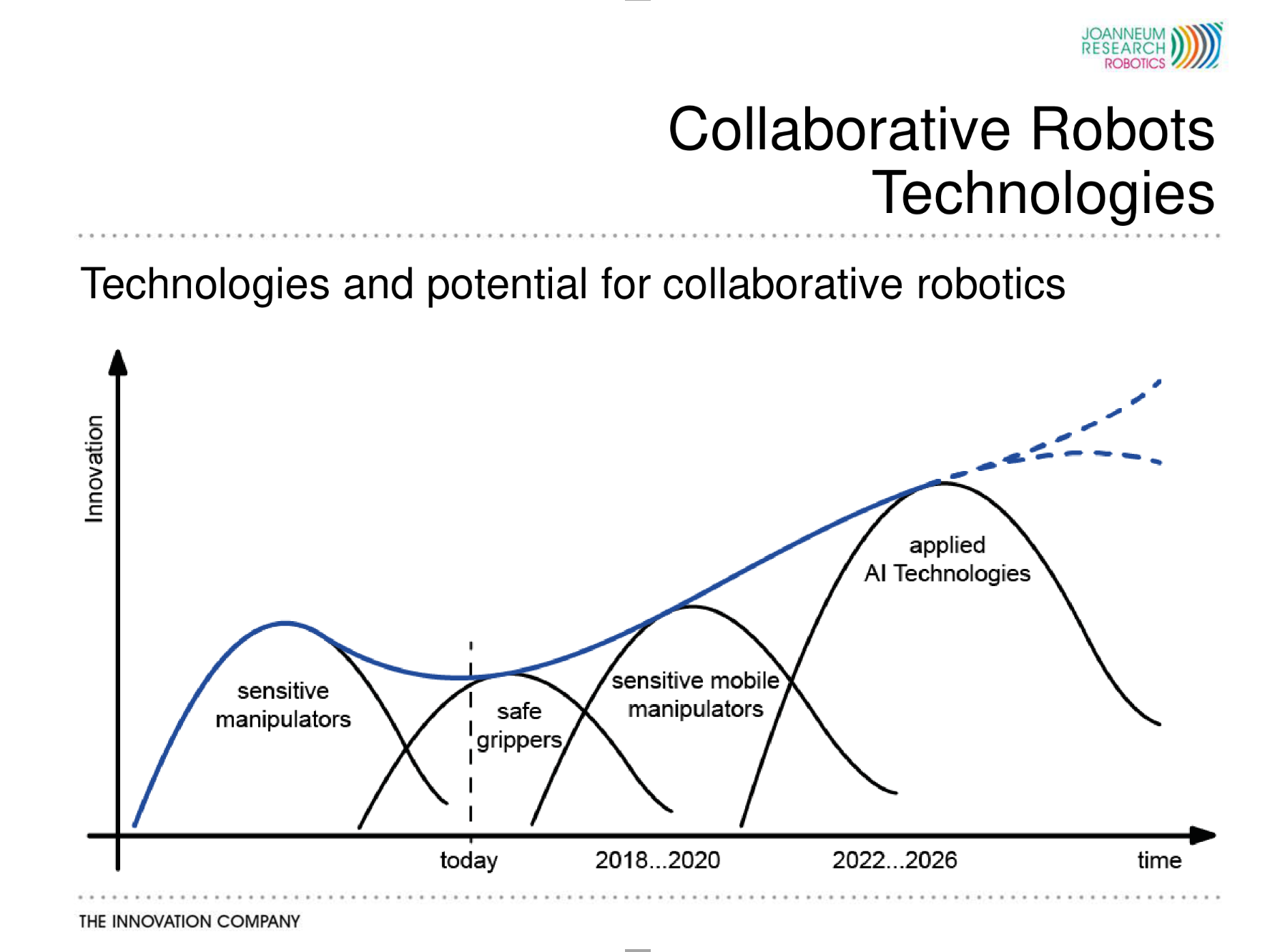
График показывает тренды на рынке коллаборативных роботов и их потенциал.
На сегодняшний день разработаны и выпускаются чувствительные к соприкосновениям манипуляторы; начался выпуск безопасных хватов. В ближайшие годы продолжится проектирование все новых безопасных хватов, также идет активная разработка мобильных коллаборативных манипуляторов, а следующим этапом станет применений технологий ИИ для управления коллаборативными манипуляторами.
+
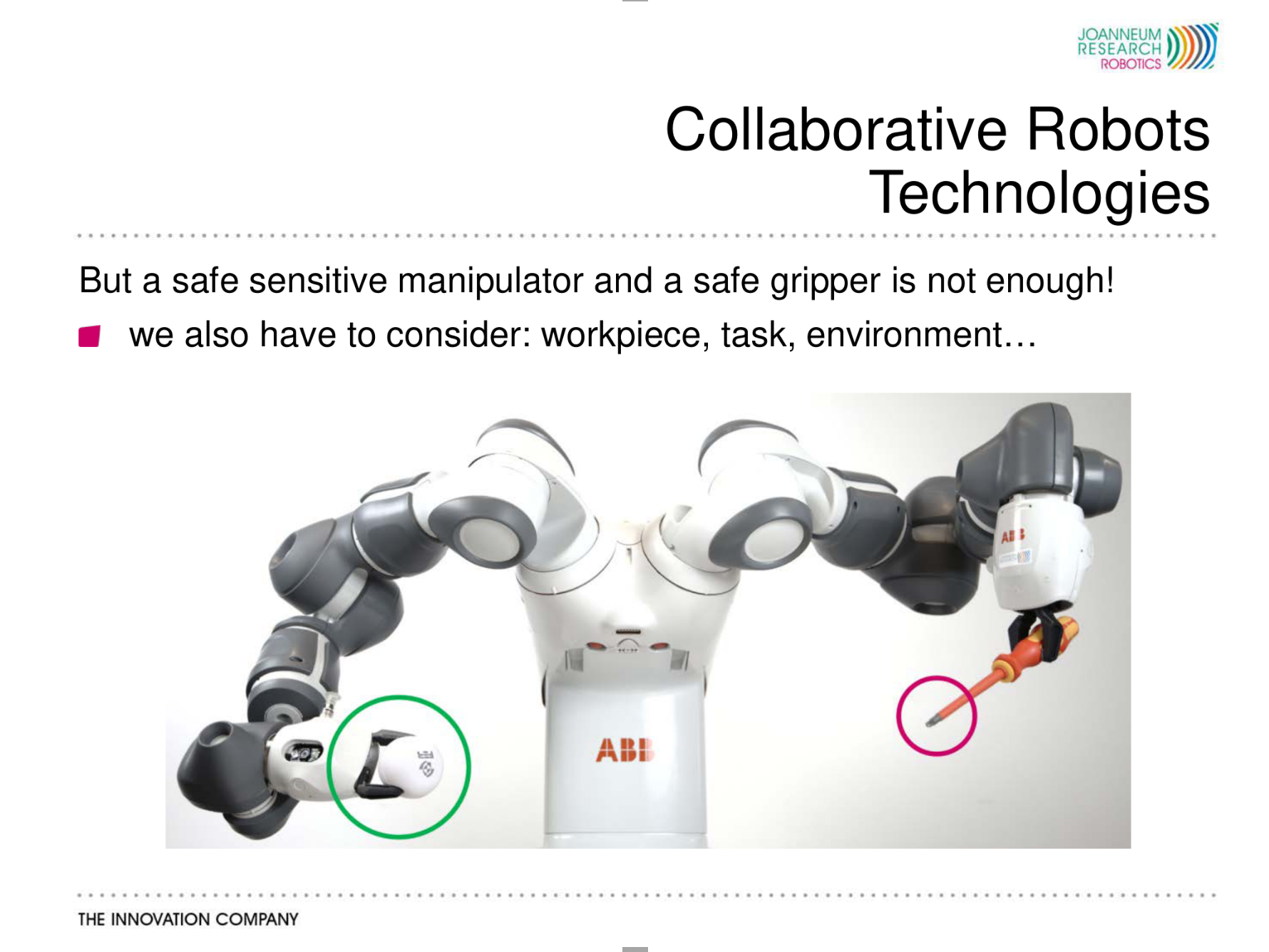
Даже безопасный манипулятор и безопасный хват - неодостаточны!
Кроме того, следует принимать в расчет: объект с которым идет работа, задачу, окружающие условия... Например, если попросить вашего коллегу передать вам отвертку, он никогда не протянет ее вам острым концом. Необходимо, чтобы и робот мог с той же легкостью выполнить вашу просьбу передать отвертку, обеспечив не меньший уровень безопасности данной операции, чем если бы это делал человек.
+
Коллаборативные роботы. Регулирование и стандарты
Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред - Айзек Азимов, 1942 год.
Промышленные роботы и системы на их основе должны соответствовать требованиям следующих стандартов:
- ISO 10218: Роботы и роботизованные устройства: Требования по безопасности для промышленных роботов;
- ISO/TS 15066: Роботы и роботизованные устройства: Коллаборативные роботы;
- ISO 13849 или IEC 62061: Безопасность машин и механизмов: Части управляющей системы, отвечающие за безопасность;
- IEC 61508: Функциональная безопасность;
- ISO 12100: Анализ рисков;
- 2006 / 42 / EC: Директивы в отношении машин и механизмов;
Требования всех этих стандартов невозможно соблюсти, если ваш робот не воспринимает окружающую среду. Стандарты 10218 и 15066 - наиболее важны для соблюдения.
+
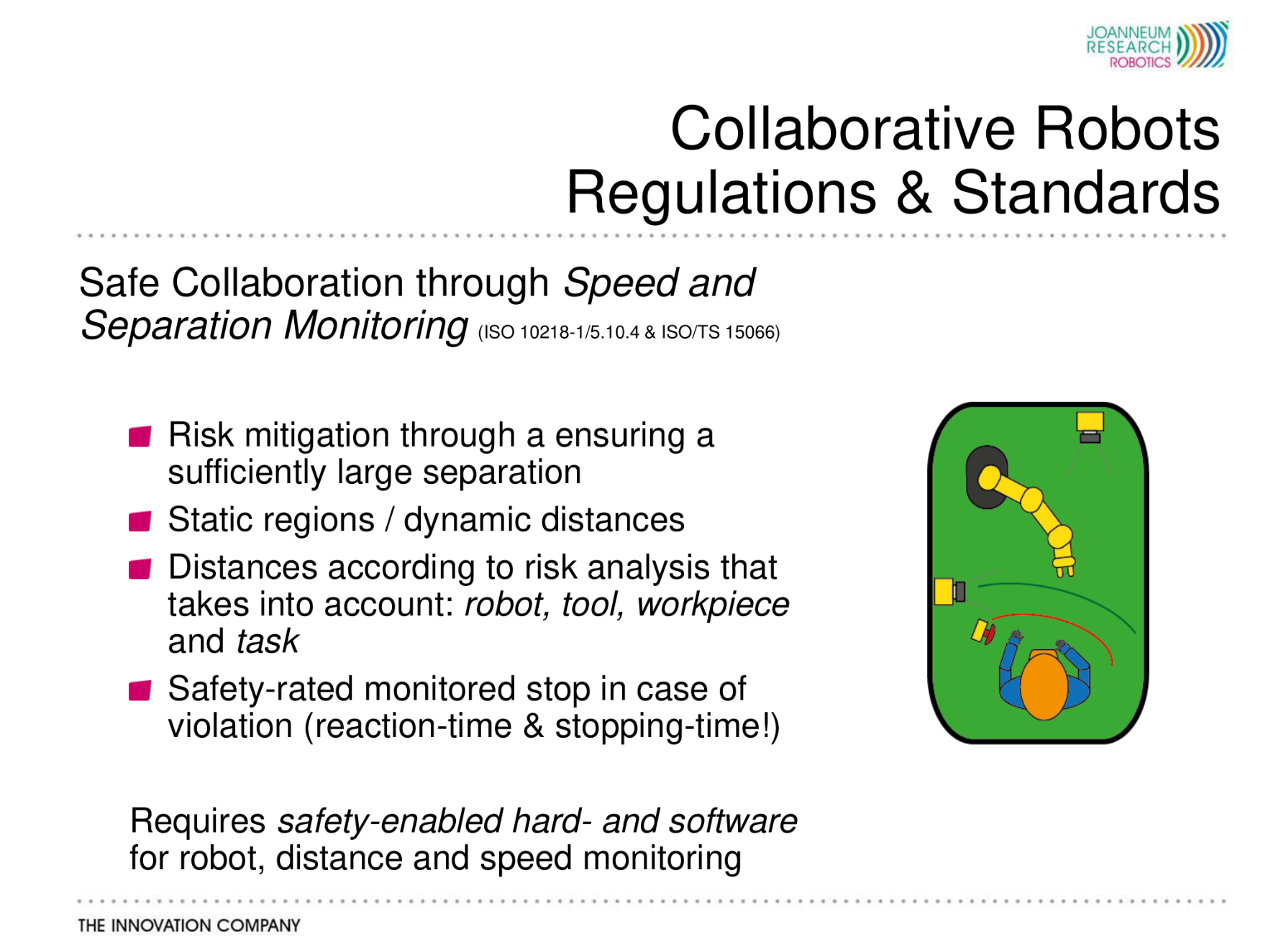
Безопасная коллаборативность за счет мониторинга скорости и пространственного разделения (ISO 10218-1/5/10.4 & ISO/TS 15066)
- Снижение рисков за счет обеспечения эффективного расстояния разделения;
- Зоны отключения / динамический выбор дистанций;
- Выбор дистанций по результатам анализа рисков, принимая во внимание робота, инструмент, рабочее пространство и задачу;
- Управляемые экстренные остановки, исходя из соображений безопасности в случае нарушения безопасных "границ" (с учетом времени реакции робота и времени остановки!)
Все это требует мониторинга железа и ПО робота, с учетом требований обеспечения безопасности его функционирования рядом с человеком.
Задача поддержания безопасной дистанции между человеком и коботом решена не до конца, очень сложно обеспечить ее решение в динамически изменяющейся рабочей среде.
+
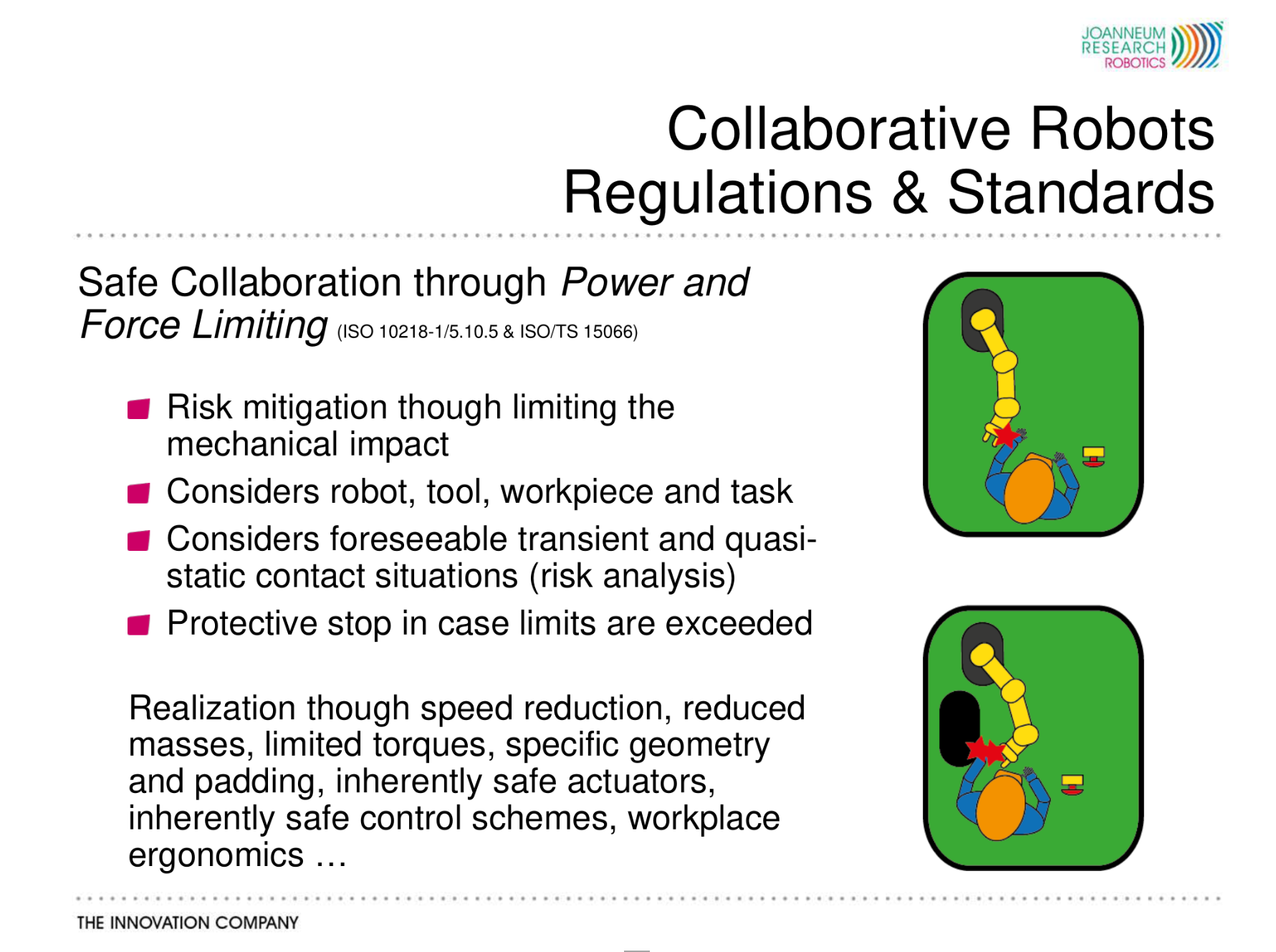
Безопасная коллаборация за счет ограничения мощности и усилий (ISO 10218-1 / 5.10.5 & ISO/TS 15066)
- Снижение рисков за счет ограничения возможного механического воздействия;
- Принятие в расчет робота, инструмента, рабочего пространства и задачи;
- Принятие в расчет предсказуемых скоротечных и квази-статичных контактных ситуаций (анализ рисков)
- Защитные шаги на случай, когда превышаются граничные критерии
Достигается за счет сокращения скоростей, сокращения масс, сокращения крутящих моментов, особой геометрии и "защитных подушек", безопасно спроектированных акутаторов, спроектированных с учетом требований безопасности схем управления, эргономики рабочих мест и так далее.
То есть пока что не обеспечивается решение задачи по исключению столкновений робота и человека, но снижен потенциал получения травм человеком в связи с возможными столкновениями, даже если они произошли.
+
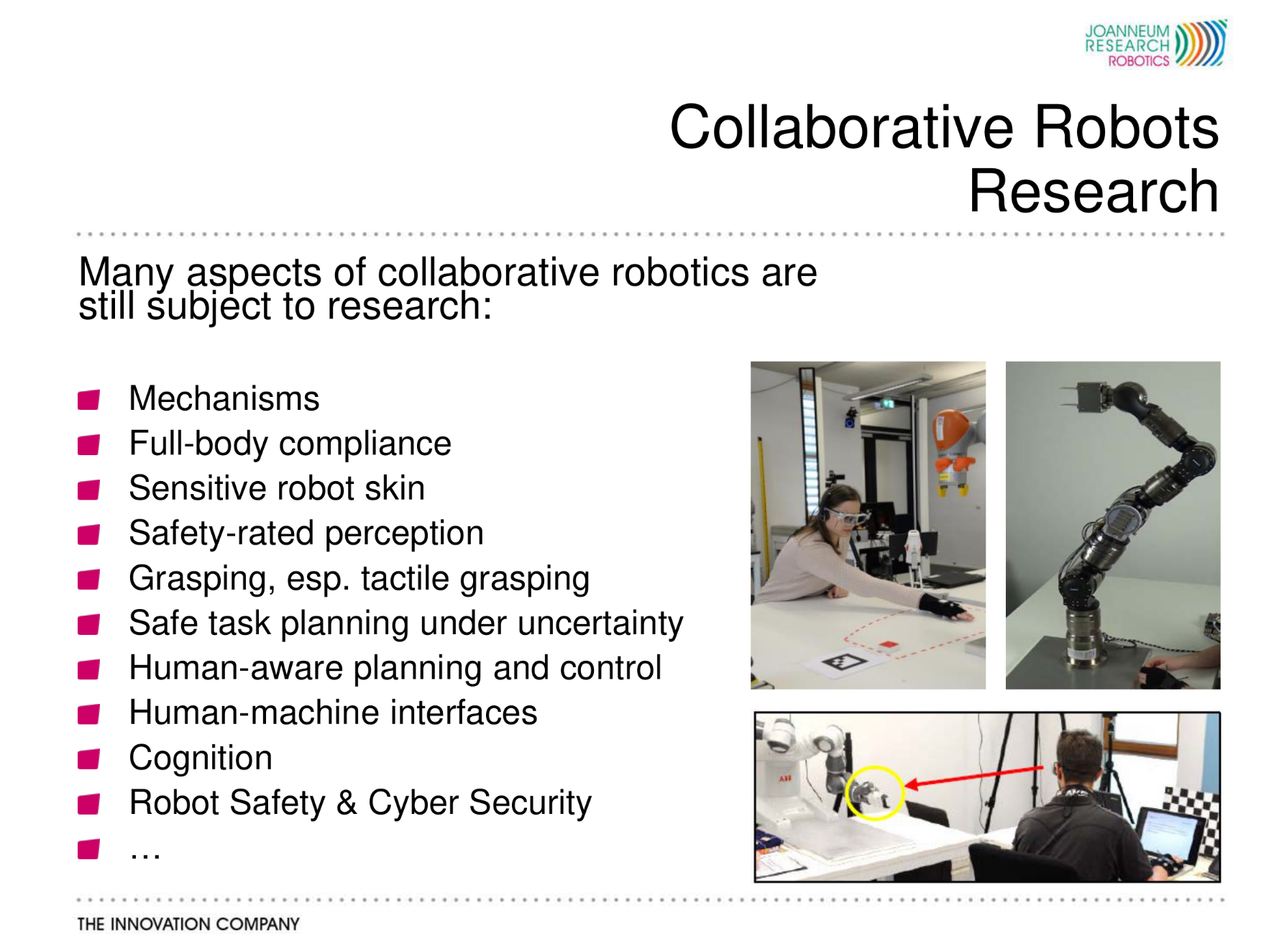
Разработки в области коллаборативных роботов
Многие аспекты в области коллаборативных роботов все еще остаются предметом новых разработок
- Механизмы
- Соответствие требованиям безопасности всего тела робота
- Обеспечение "чувствительной кожи" для робота
- Восприятие с учетом соображений безопасности
- Функциональность хватания, в особенности разработка схватов с тактильной функциональностью
- Планирование безопасного функционирование в условиях неопределенности
- Планирование и управление с учетом наличия человека в рабочей зоне
- Человеко-машинные интерфейсы
- Распознавание
- Безопасность робота и кибербезопасность (защита от взлома робота)
- ...
+
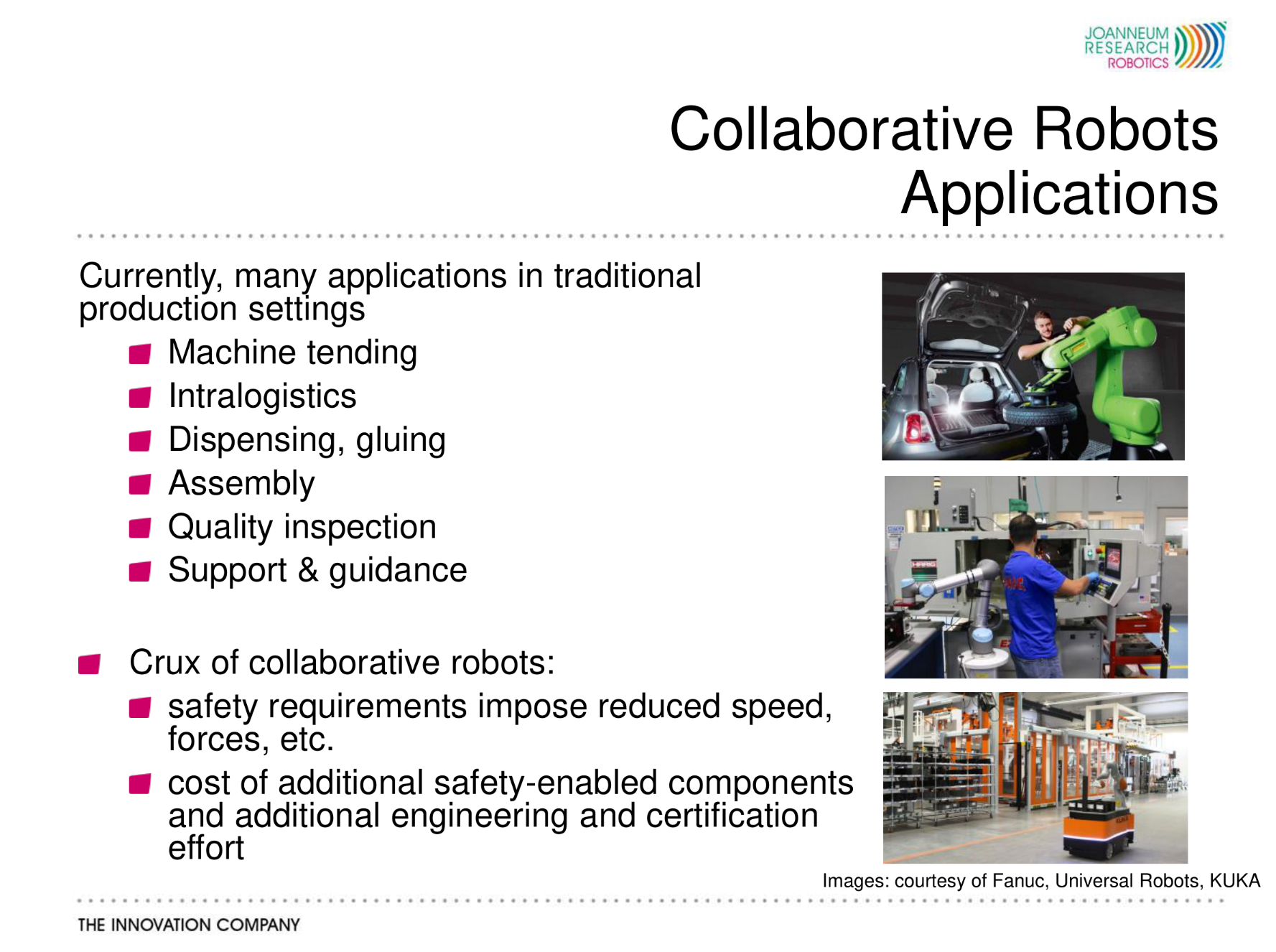
Применения коллаборативных роботов
В настоящее время, коллаборативные роботы часто применяют в традиционной производственной среде
- Загрузка станков;
- Внутреннаяя логистика;
- Разбрызгивание (воды, краски), нанесение клея
- Сборка
- Контроль качества
- Поддержка и управление
Сложными моментами для коллаборативного робота остается:
- соблюдение требований безопасности, требуюших снижения скоростей, сил и т.п.
- стоимость дополнительных компонентов, обеспечивающих безопасность и дополнительных усилий по инженирингу и сертификации
(На фото - зеленый робот FANUC CR-35; Universal Robots UR 5 и мобильный коллаборативный робот KUKA).
Обратной стороной безопасности является снижение скорости работы коботов, снижение максимальной величины грузов, которыми они могут манипулировать без повышения риска для человека работающего бок-о-бок с роботом.
Работы по обеспечению все более высокого уровня безопасности приводят к тому, что несмотря на сокращение стоимости коботов по мере роста их массовости, цена на них сокращается медленно, поскольку необходимость обеспечения все более высоких уровней безопасности заметно удорожает процессы разработки новых моделей коботов.
+
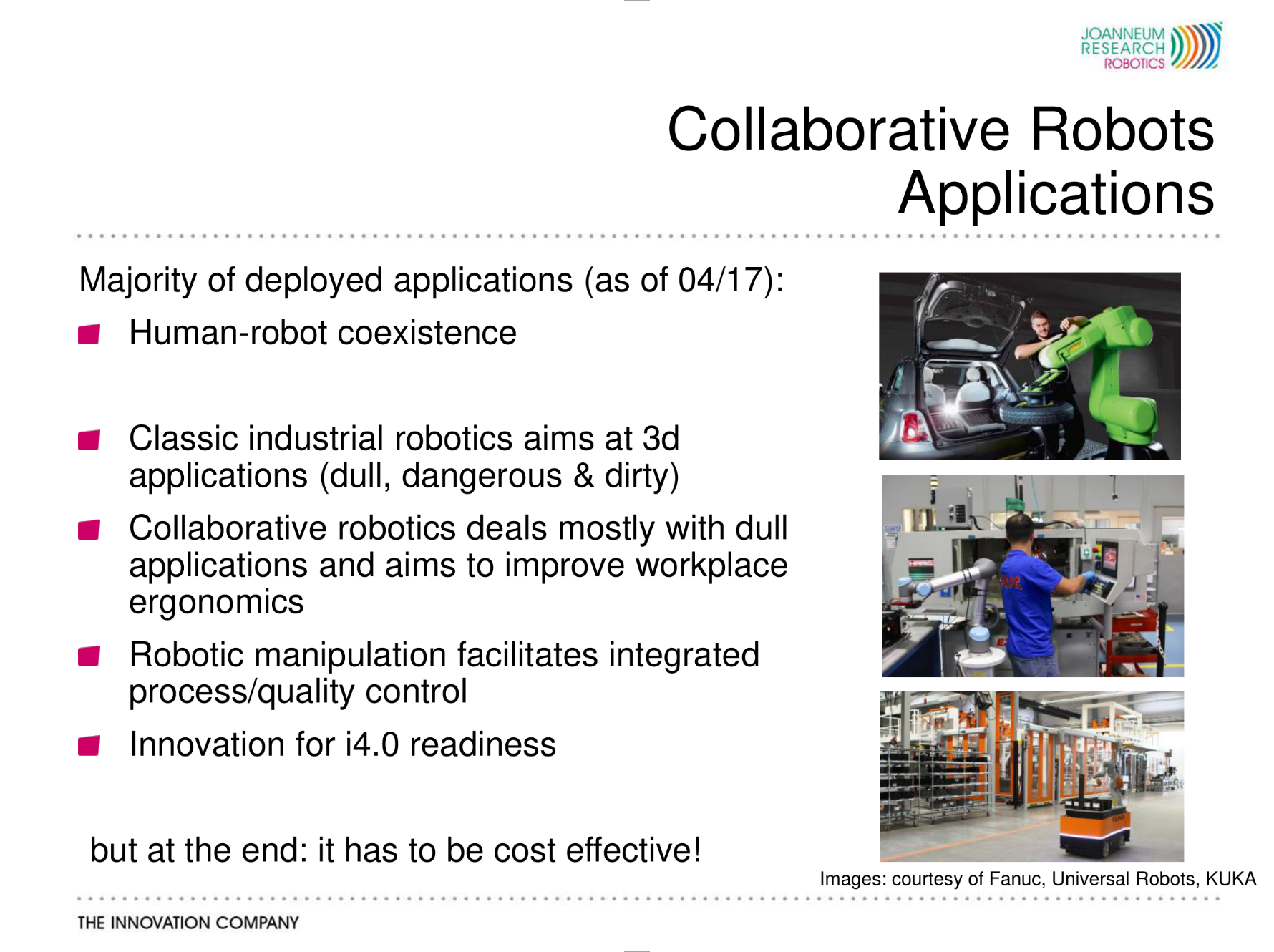
В основном внедренные приложения (на апрель 2017 года) следующие:
- Совместная работа человека и робота
- Классические для промышленных роботов применения - 3d-типа (скучные, опасные, грязные)
- Коллаборативные роботы в основном применяются в ситуациях, где повторяются одни и те же действия и служат для повышения эргономичности рабочего пространства
- Роботизированные манипляторы как правило обладают встроенным управлением процессами и качеством;
- Инновации идут в направлении обеспечения требований готовности к i4.0
Но при всем это коллаборативные роботы должны быть эффективными по стоимости владения ими.
Если говорить о существующих на рынке коллаборативных роботах, то пока что их несправедливо называть коллаборативными. Они всего лишь могут относительно безопасно сосуществовать рядом с человеком, но до полного уровня "взаимопонимания", надежной и своевременной помощи человеку, высокого уровня безопасности работы в тандеме с роботом, пока что все еще остается немалый путь. Поэтому коллаборативных роботов сейчас часто используют практически в том же качестве, что и промышленных.
+
Перспективы в области использования коллаборативных роботов
- Использование возможностей коллаборативных роботов для инновационных процессов производства;
- Обеспечение безопасности и учет ограничений при оптимизации приложений
- Использование ИИ для обеспечения гибкости работы робота и улучшения восприятия им окружающей среды
- Коллаборативные роботы меняют правила игры на рынке, поэтому их не следует рассматривать исключительно, как альтернативу традиционным - пробуйте применять их в новых целях, например, в логистике.
+
Контакты

++









