
DIY: Clearwalker - самодельный робот-паук из акрила
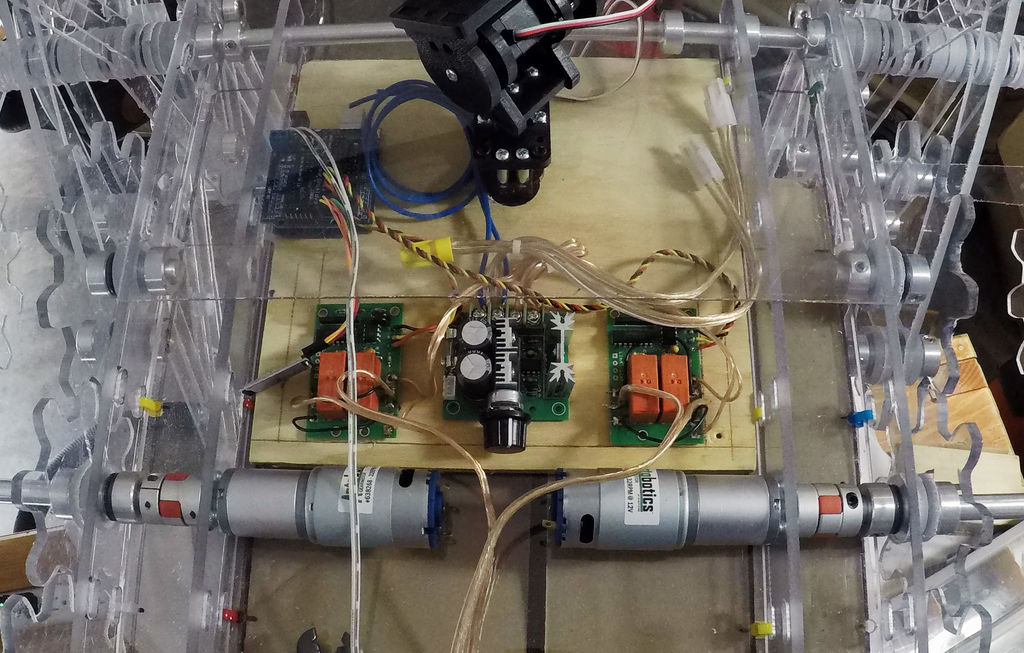
02.06.2017Julian Horsey собрал этого симпатичного робота-паука на базе Arduino (контроллер Arduino Mega). В конструкции задействовано всего два электродвигателя, которые управляются релейными модулями H-bridge, что позволяет паучку двигаться вперед, назад или медленно поворачиваться за счет изменения направления вращения электромоторов. Управление - со смартфона через Bluetooth. Паук движется сходно с танком или роботом, маневрами которого можно управлять за счет разной скорости вращения двух его колес.
Оцените видеоролик, демонстрирующий новинку и поясняющей ее конструкцию. Автор светодиодного украшения дизайна конструкции - Jeremy Cook.
Шаг 1. Запаситесь материалами
- (2) двигателя с планетарным редуктором Planetary Gear Motors:
- (2) коммутаторы H-Bridge PWM Switches:
- (2) батареи 8.4 В, 1400 мАч NiCad Battery Packs:
- (2) коннекторы Tamiya Connectors:
- контроллер управления скоростью PWM Speed Controller: or
- (1) разъемы Pkg Crimp Terminals:
- конвертор напряжения питания Buck Voltage Converter:
- контроллер Arduino Mega:
- модуль BT: HC-06 Bluetooth Module:
- различные провода Various Wires
- смартфон Smartphone
Шаг. 2 Принципиальная схема
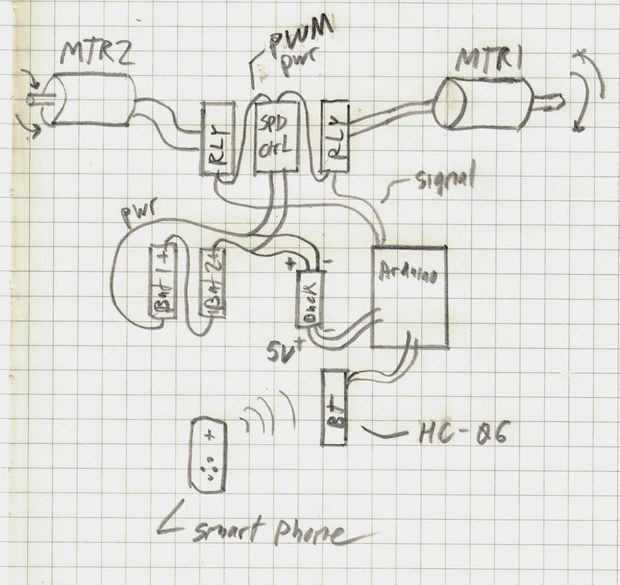
Как показано на схеме, основная идея - это подключение модуля HC-06 к вашей плате Arduino, как беспроводного серийного порта. Благодаря этому Arduino сможет выдавать сигналы ШИМ (широтно-импульсной модуляции), заставляя электромоторы подключенные к H-Bridge начинать движение вперед, останавливаться или крутиться назад. Питание обеспечивают батареи аккумуляторов. Благодаря использованию ШИМ, можно управлять скоростью движения ног. Батареи также подключены к конвертору напряжения, который обеспечивает необходимые для Arduino 5В.
Шаг 3. Программа для контроллера
Arduino следует настроить так, чтобы он принимал команды по Bluetooth. В программе, которую можно скачать по ссылке, подразумевается, что TX и RX - это соответственно пин 10 и 11. Двигатели управляются как ШИМ-сервомоторы, подсоединенные к пин 2 и пин 3.
Шаг 4. Настройка смартфона
Управлять по Bluetooth очень просто. Чтобы посылать команды роботу, Julian Horsey пользовался программой . Затем перешел на использование . Вторая программа позволяет раскидать команды по клавишам, как в игровом пульте ДУ. Arduiono преобразует эти нажатия в соответствующие сигналы на выходе. Если вам требуется большая гибкость управления, можете попробовать , но автор робота этого делать не пробовал.
Шаг 5. Все готово
Когда вы все правильно соедините, запитаете и запрограммируете, у вас должно получиться подсоединиться к роботу с вашего смартфона по Bluetooth и управлять вашим роботом, за счет управления направлением вращения двигателей. Далее робота можно модифицировать, насколько хватит вашей фантазии. Еще раз рекомендуем посмотреть .
Если кто-то из читателей решит повторить эту разработку и добъется успеха, присылайте нам в RoboTrends.ru фото или ссылку на Youtube с записью - что у вас получилось. Ну а если самостоятельная сборка робота пока что кажется вам слишком сложным делом, загляните на страничку "Конструкторы для сборки роботов", возможно присмотрите что-то, что вам приглянется и покажется посильным делом.
+ +









