
Первые два робота-попрыгунчика спустились на поверхность астероида Рюгу
24.09.201821 сентября 2018 года исследовательские роботы Rover-1A и Rover-1B, вместе они составляют исследовательский комплекс MINERVA-II 1”, успешно спустились на поверхность астероида Рюгу (162173) с борта японского космического аппарата Хаябуса 2 (Hayabusa2). Еще на подлете к астероиду , тем не менее сброс первых двух роботов прошел без осложнений.
Астероид Рюгу расположен на расстоянии 2.8 млрд км от нашей планеты. Его примерный диаметр составляет 920 м, а формой он похож на кубик.
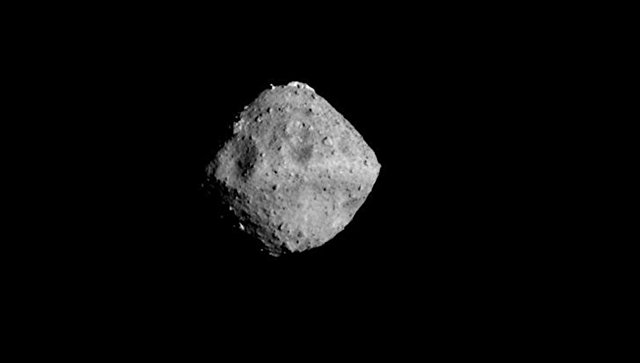
Астероид Рюгю. Изображение: JAXA, University of Tokyo & collaborators
Источник фото:
Японский космический аппарат Хаябуса 2, оснащенный ионными двигателями, отправили в космос в декабре 2014 года.
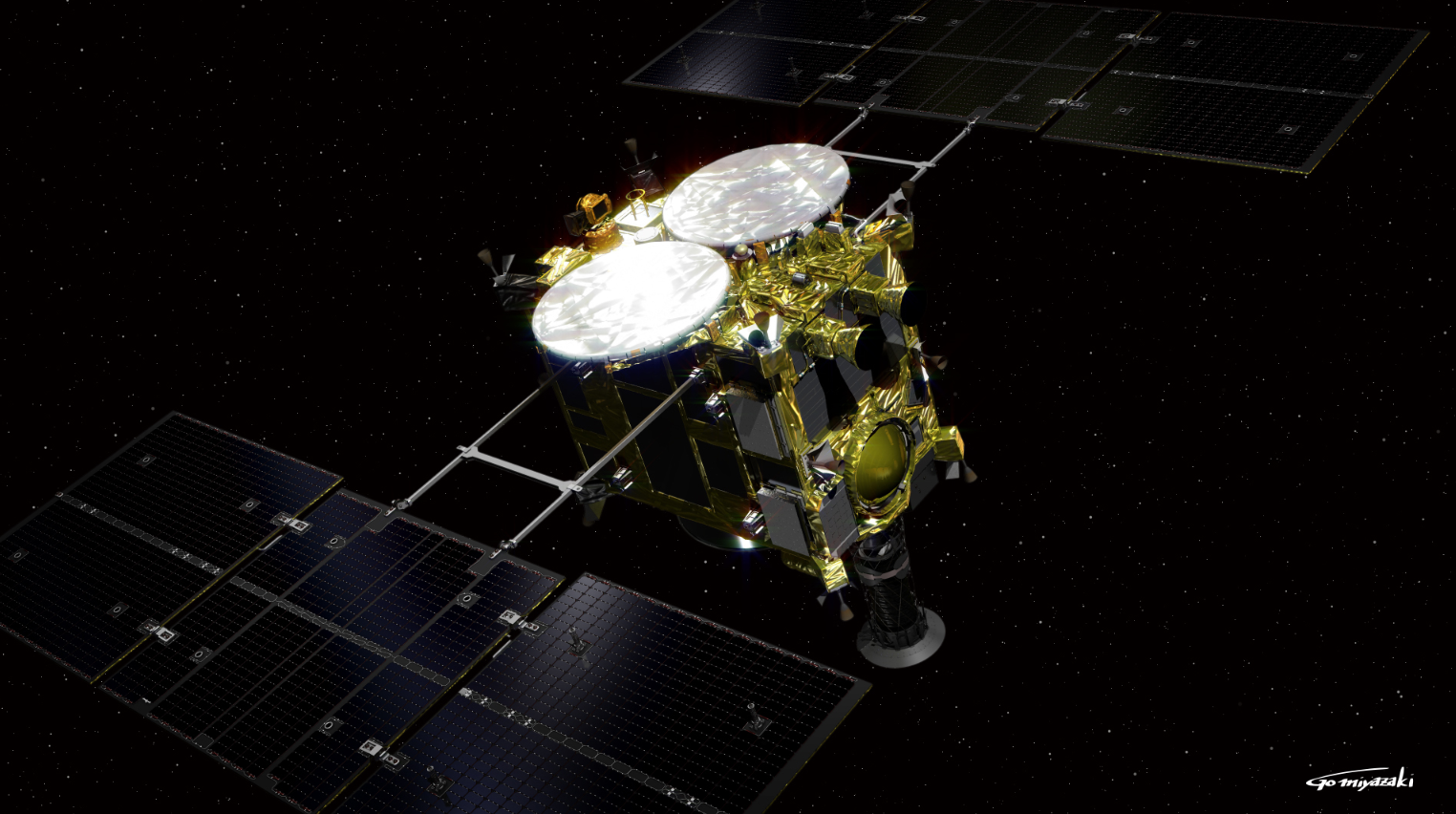
Космический аппарат Хаябуса 2, изображение: Go Miyazaki,
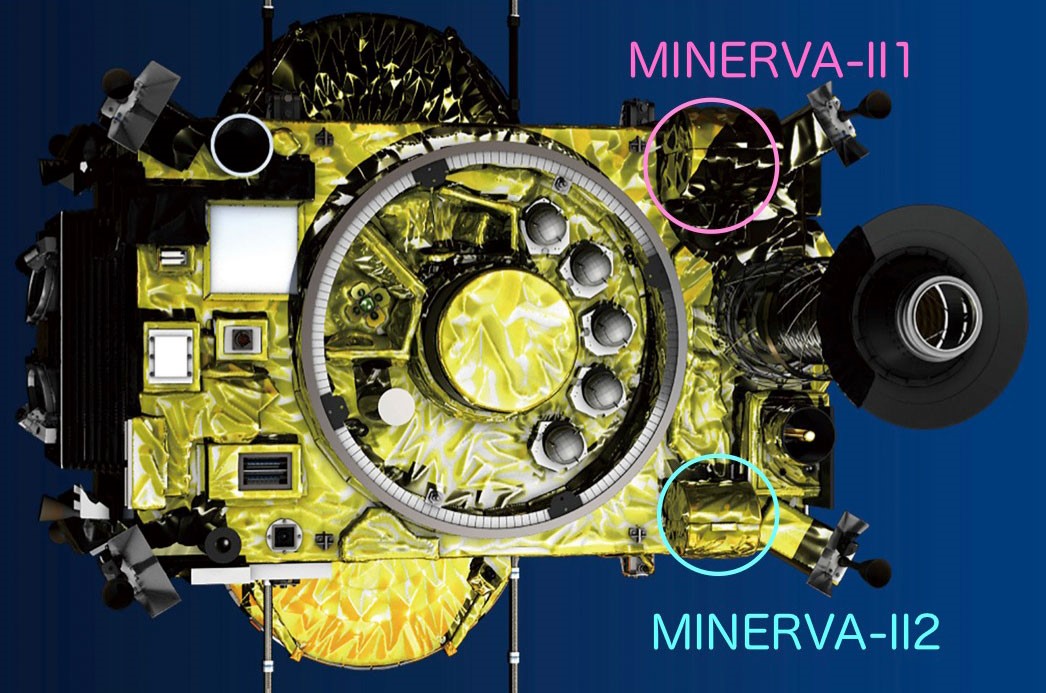
Преодолев около 3.2 млрд км он вышел на орбиту астероида Рюгю, доставив к нему исследовательские прыгающие роботы Rover-1A и Rover-1B комплекса Minerva-II1 и робота Rover-2 комплекса Minerva-II2, а также европейский мобильный исследовательский аппарат MASCOT.
Космический аппарат Хаябуса 2. Изображение JAXA. Источник фото:
Хаябуса 2 находится на расстоянии порядка 20 км от астероида, но для сброса контейнеров с роверами он сблизился с астероидом до расстояния в 600 метров, а затем вернулся в “базовый лагерь”. Отсюда он ведет изучение астероида с помощью оптической камеры, термочувствительной камеры, спектрографа и лазерного дальномера.
Предшественник космического аппарата Хаябуса 2, аппарат Minirva в 2010 году совершил миссию на астероид Итокава (Itokawa). Миссия была не вполне удачной.
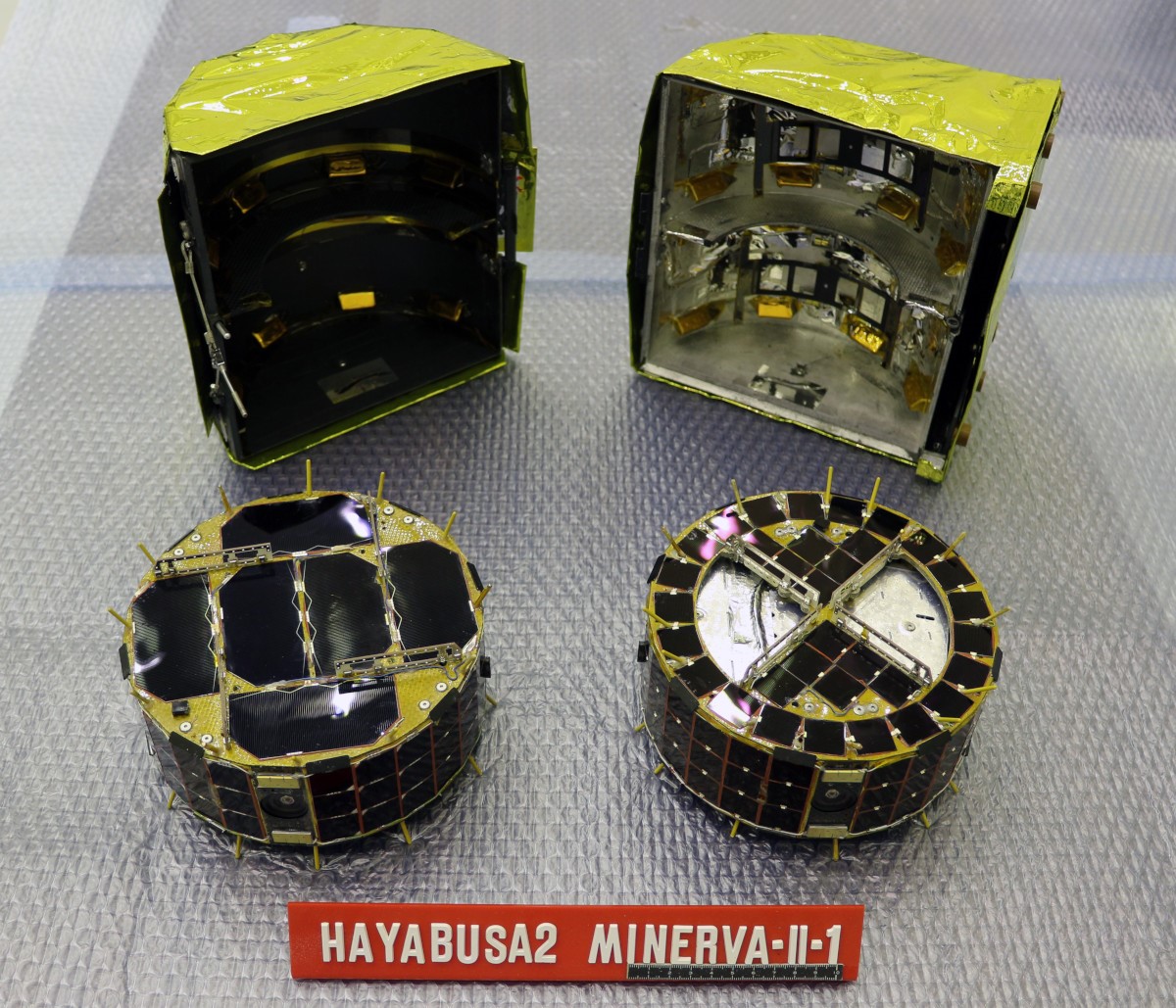
На фото роверы Rover-1A (слева) и Rover-1B (справа), позади защитные контейнеры в которых они находились по дороге к астероиду. Вместе роверы составляют исследовательский комплекс Minerva-II-1, который во время полета находился в нижней части космического аппарата Хаябуса 2, а теперь совершил успешную посадку на астероид. Изображение: Japan Aerospace Exploration Agency, источник:
Диаметр каждого ровера - 18 см, высота - 7 см, весит робот около 1.1 кг. Разработаны роботы в JAXA - Институте космоса и астронавигации Японского аэрокосмического исследовательского агентства. В работе также принимали участие такие компании и учреждения, как Aichi University of Technology, University of Aizu, Addnics corp, Antenna Giken Co., Ltd, ELNA, CesiaTechno, University of Tokyo, Tokyo Denki University, Digital Spice Corp, Nittoh Inc., Maxon Japan, DLR, ZARM.
Rover 1A оснащен четырьмя цифровыми камерами, еще три цифровых камеры установлены на Rover 1B. Полученные с них изображения позволят воссоздать стереоизображение поверхности астероида. Сенсоры температуры дают возможность с высокой точностью измерять температуру на поверхности Рюгю. Также на каждом ровере есть оптические сенсоры, акселерометр и гироскоп.
Роверы Rover-1A (на заднем плане) и Rover-1B (на переднем плане)
Изображение: Japan Aerospace Exploration Agency, источник:
Роверы пересылают данные на космический аппарат с помощью репитера OME-E. Максимальная скорость передачи данных в канале связи составляет 32 кбит/c. Полученные Hayabusa2 данные затем передаются на Землю. Также репитер обеспечит связь с европейским посадочным модулем MASCOT, который планируется задействовать в октябре.
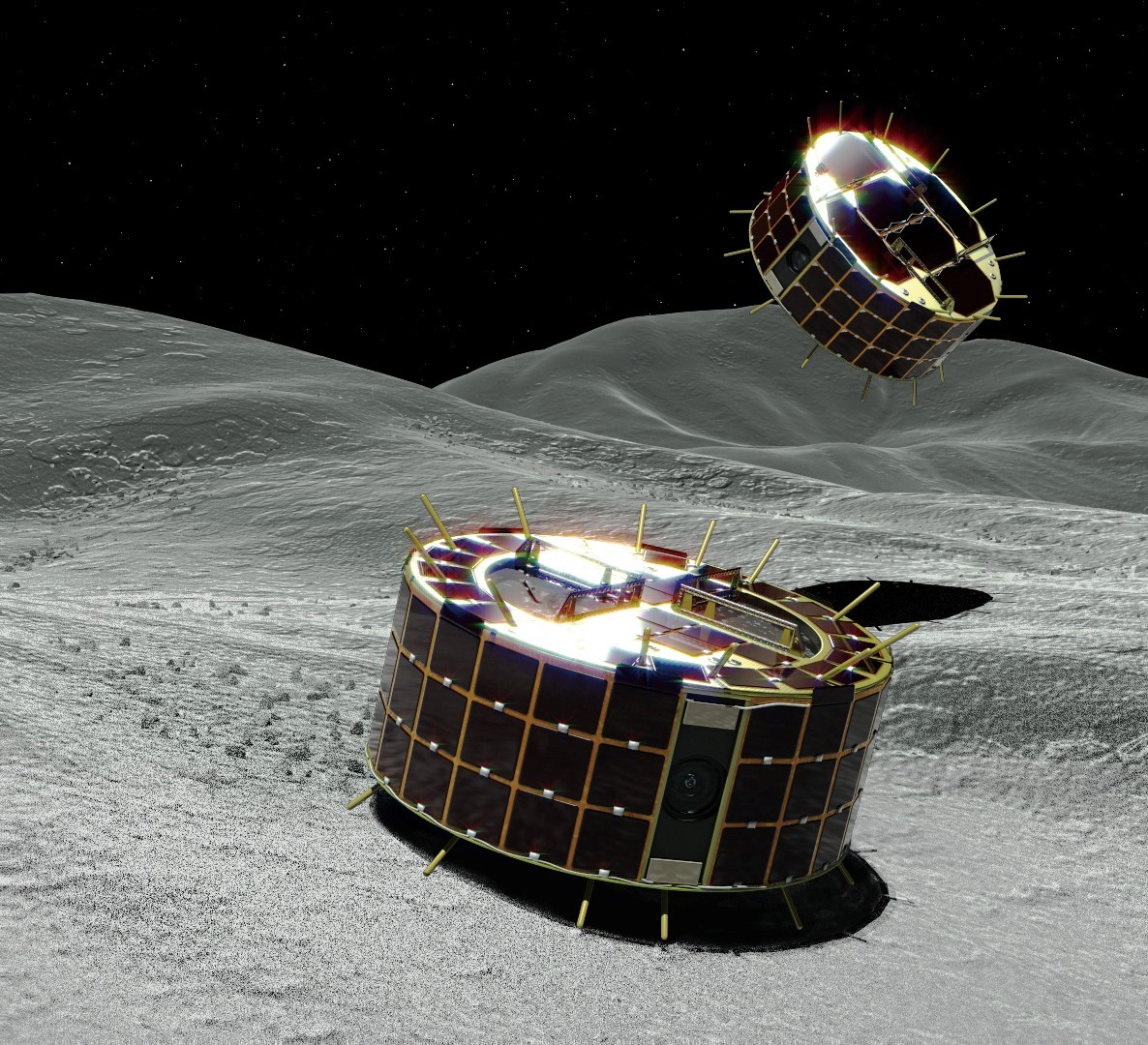
Роверы передвигаются по поверхности астероида с помощью оригинального “прыжкового механизма”. Гравитация на поверхности астероида очень мала, поэтому если бы роверы были оснащены обычным колесным или гусеничным приводом, они бы взмывали вверх над поверхностью лишь попытавшись начать движение. С учетом этой особенности, инженеры разработали необычный прыжковый механизм: каждый ровер оснащен асимметричным маховиком, оборот которого заставляет ровер подпрыгивать под углом к поверхности, что обеспечивает возможность движения вдоль поверхности астероида.
Как ожидается, после каждого прыжка, ровер будет зависать над поверхностью астероида до 15 минут не касаясь ее, за это время он переместится примерно на 15 метров по горизонтали. По задумке это позволит ученым осмотреть различные области астероида.
Роверы Minerva-II1 передвигаются в автономном режиме, самостоятельно решая, какие исследования они могут провести. Питание они получают от фотоэлектрических элементов, размещенных на их поверхности.
В октябре 2018 года планируется посадить на поверхность астероида германо-французский спускаемый аппарат MASCOT, оснащенный спектрометром, магнитомером, радиометром и камерой, а также двигательной установкой. Размеры робота - 29.5 см х 27.5 см х 19.5 см, масса - 9.6 кг. Робот оснащен инфракрасным спектрометром, магнетометром, радиометром и камерой, способной фотографировать небольшие предметы, например, текстуру риголита. Как и все остальные роботы, MASCOT оснащен прыжковым механизмом. Питание робот получает от специальной батареи.
Также в октябре 2018 года планируется сближение космического аппарата Хаябуса-2 с поверхностью астероида вплоть до касания ее специальным “хоботом”. Как только хобот коснется поверхности, будет произведен выстрел 5-граммовой пулей из танталла, которая столкнется с поверхностью астероида на скорости 300 м/с. Как ожидается, это позволит взять пробу частиц, находящихся под поверхностью астероида.

Взятие пробы грунта космическим аппаратом Хаябуса-2. Изображение: JAXA. Источник изображения -
Еще одна проба грунта будет проходить так. Космический аппарат с расстояния в 500 метров выпустит в поверхность астероида медный ударник весом 2.5 кг. Чтобы обеспечить этот снаряд достаточной кинетической энергией, его приведт в движение заряд пластиковой взрывчатки весом 4.5 кг. Согласно расчетам, это создаст на поверхности астероида кратер диаметром два метра, куда через пару недель спустится космический аппарат, чтобы взять образцы подповерхностного грунта.
Следующий элемент программы исследований - попытка сброса на поверхность астероида исследовательского ровера Minerva-II-2 в 2019 году. Это аппарат диаметром 15 см и высотой 16 см, его вес около 1 кг. Аппарат оснащен двумя камерами, термометром и акселерометром, а также парой из фотодиода и ультрафиолетового светодиода для обнаружения частичек пыли. Стоит ли говорить, что и его принцип движения - прыжковый.
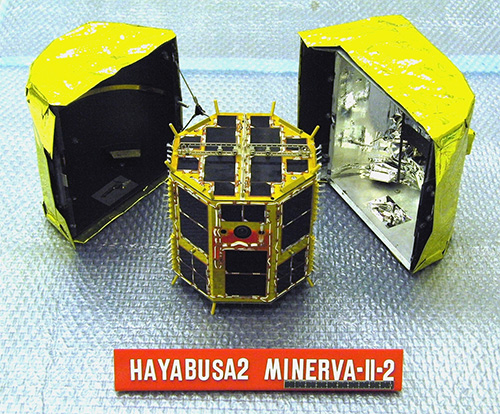
Прыгающий робот MINERVA II2 и его контейнер. Источник фото:
В ноябре-декабре 2019 года Hayabusa2 с образцами грунта возьмет курс на Землю, возвращение зонда на нашу планету намечено на декабрь 2020 года. ++









