В Иннополисе создают компоненты экзоскелетов нового типа
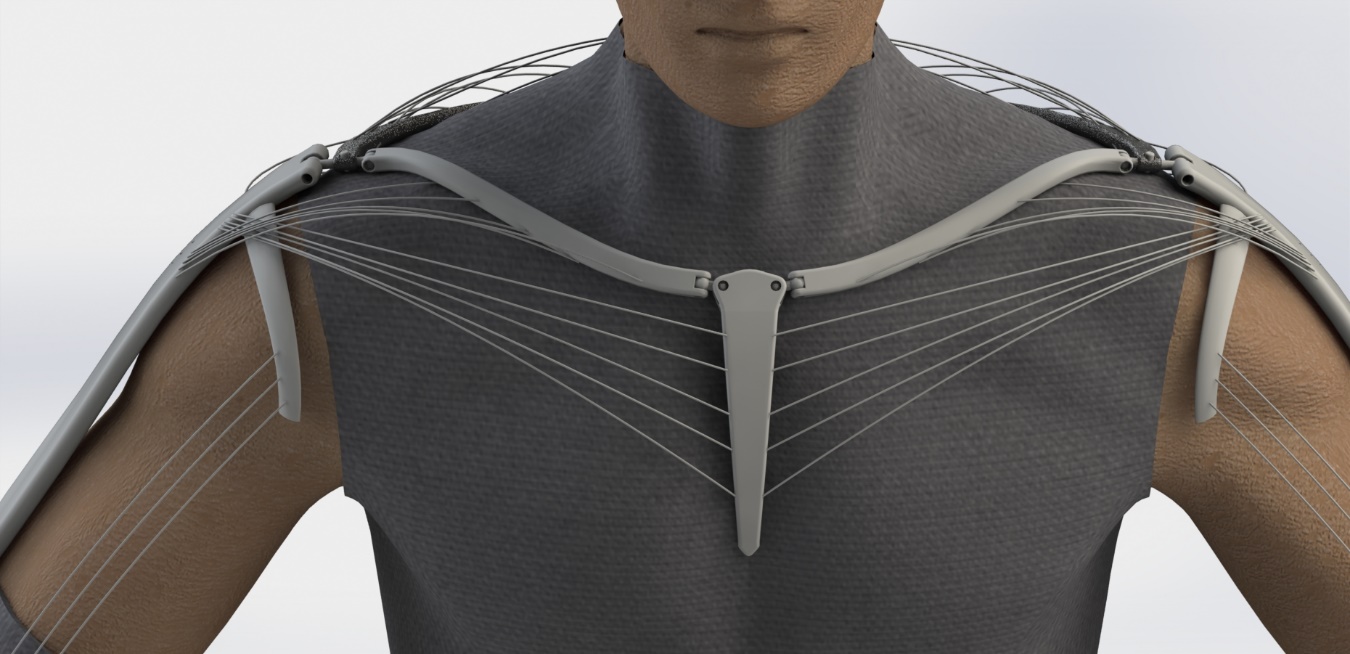
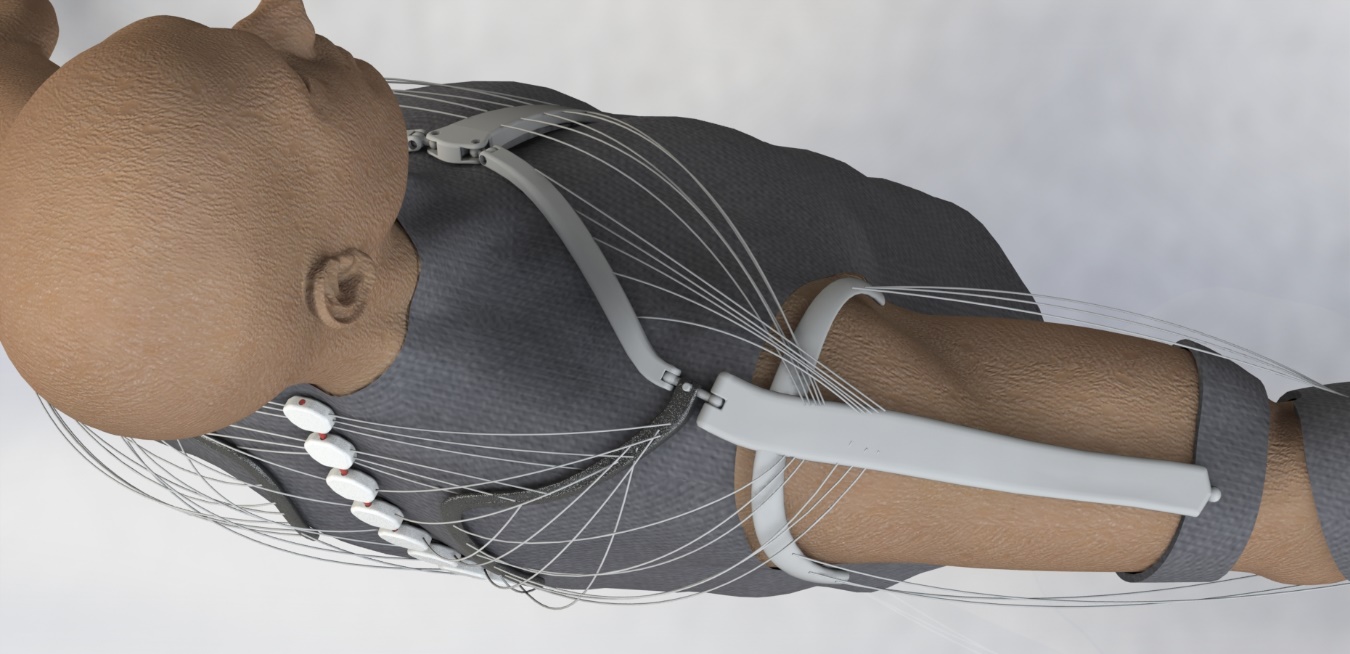
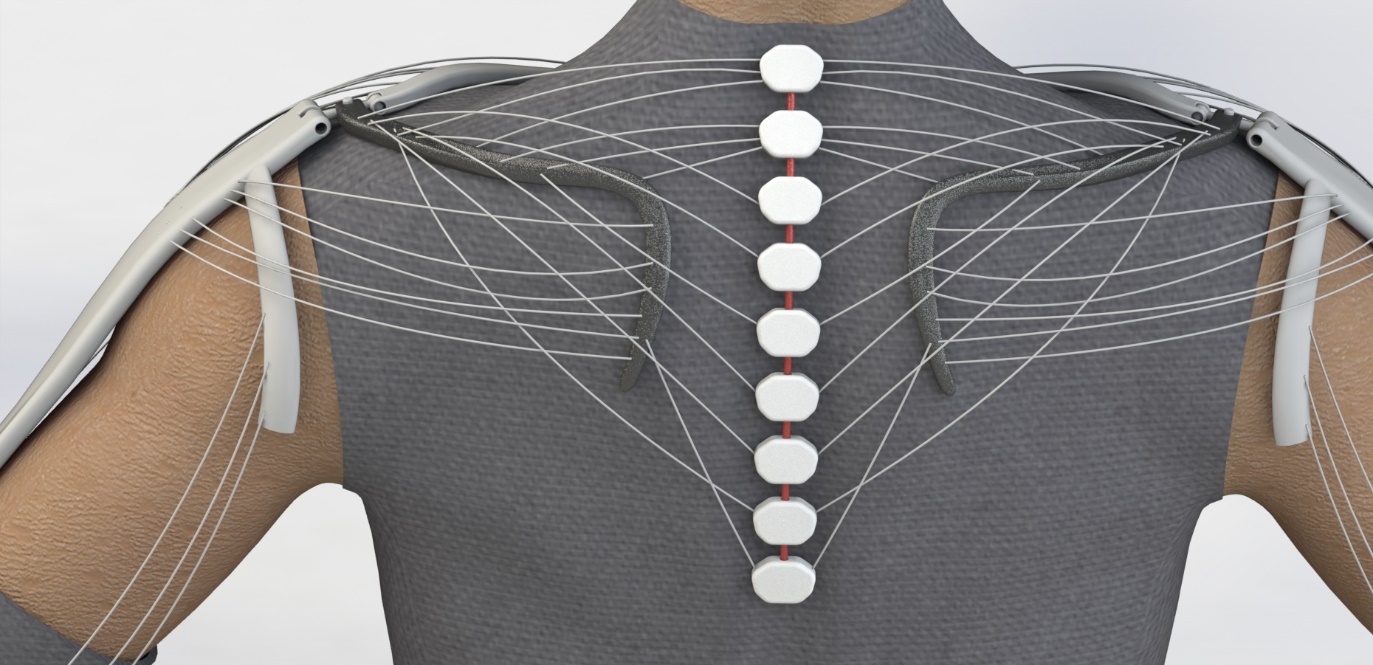
24.12.2020В Центре компетенций НТИ по направлению "Технологии компонентов робототехники и мехатроники" на базе Университета Иннополис, куда входит лаборатория, предложили создавать робототехнические устройства с приводами на основе скручивания нитей - несколько тонких тросов сокращаются, закручиваясь от электродвигателя. Такие приводы энергоэффективны, конструкция простая, к тому же привод может быть расположен на расстоянии от точки приложения силы.
Этот метод передачи движения исследователи уже представляли в другом совместном конкурсе РФФИ с южнокорейским университетом KAIST, доказав, что грузоподъемность систем на приводах данного типа выше аналогов.
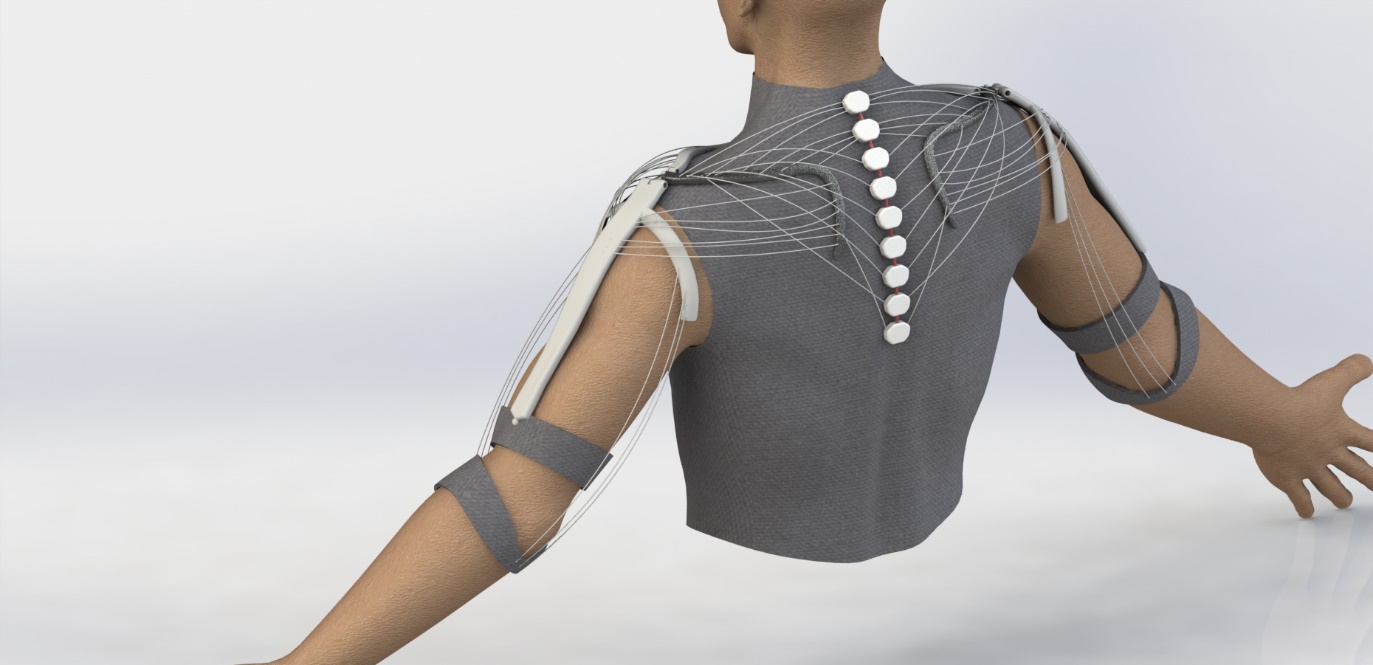
В конкурсе, который проводил РФФИ и Лондонского королевского общества, специалисты Университета Иннополис выиграли 1.5 млн рублей. Совместно с коллегами из Лондонского Университета Королевы Марии российские ученые намерены разработать робототехническую систему, человеко-машинный интерфейс, систему управления и привод на основе скручивания нитей. Эти разработки помогут в дальнейшем создании систем для помощи человеку на производстве, в переносе тяжестей, для функциональной реабилитации конечностей после инсульта. На первом этапе будут создаваться устройства-компоненты, в частности, джойстики. Изучив данные, команда проекта сможет перейти к разработке роботизированных экзоскелетов.
«Такие разработки станут помощниками работников в промышленности, логистике, транспортировке, сельском хозяйстве. Это сейчас востребовано, потому что падает привлекательность физического труда и повышаются требования к качеству и количеству выпускаемой продукции. Другая значительная категория населения — пожилые люди и люди с нарушениями опорно-двигательного аппарата, которым нужна помощь в повседневной жизни: приём пищи, подъём по ступенькам, перенос предметов и обеспечение мобильности. Долговременным решением данной проблемы станет использование носимых роботизированных систем, способных реагировать на команды человека и помогать ему в решении необходимых задач», — объясняет Игорь Гапонов, руководитель Лаборатории мехатроники, управления и прототипирования.
Разработочики планируют получить результаты исследования нервно-мышечной активности человека во время взаимодействия с утройствами на основе приводов на скручивание нитей, а конструкция синтезированных устройств будет оптимизирована с учетом полученных данных. Это заложит основы для нового вектора развития ассистирующей и реабилитирующей робототехники и человеко-машинного взаимодействия.
«Также стоит отметить, что в такой тесной работе человека с роботом наш принцип скручивания нерастяжимых нитей является плюсом — такие приводы энергетически эффективнее и безопаснее для человека. А механизмы с такими приводами способны развивать достаточную скорость движения и усилия в ответ на активацию человеческих мышц», — добавил Игорь Гапонов.