
«Морская робототехника» в Китае - визит в Qуsеa - Fifish X1
26.04.2026Как я вам уже рассказывал, в апреле 2026 года мне довелось побывать к Китае в составе делегации российской компании «Тазмар Маритайм» (спасибо, коллеги!). Мы были в гостях у нескольких производителей морских роботов, была возможность посмотреть их продукцию, в том числе, в действии - в условиях бассейна. Второй визит был в компанию Qysea, известную в том числе в России своими ТНПА осмотрового класса.
Компания была основана в 2017 году. Ее полное название - Shenzhen QYSEA Tech Co., так что вы вряд ли удивитесь тому, что ее штаб-квартира расположена в Шэньчжене. Компания разрабатывает, производит и продает ТНПА и некоторые виды полезной нагрузки, обучает пилотов.
Линейка ТНПА компании Qysea
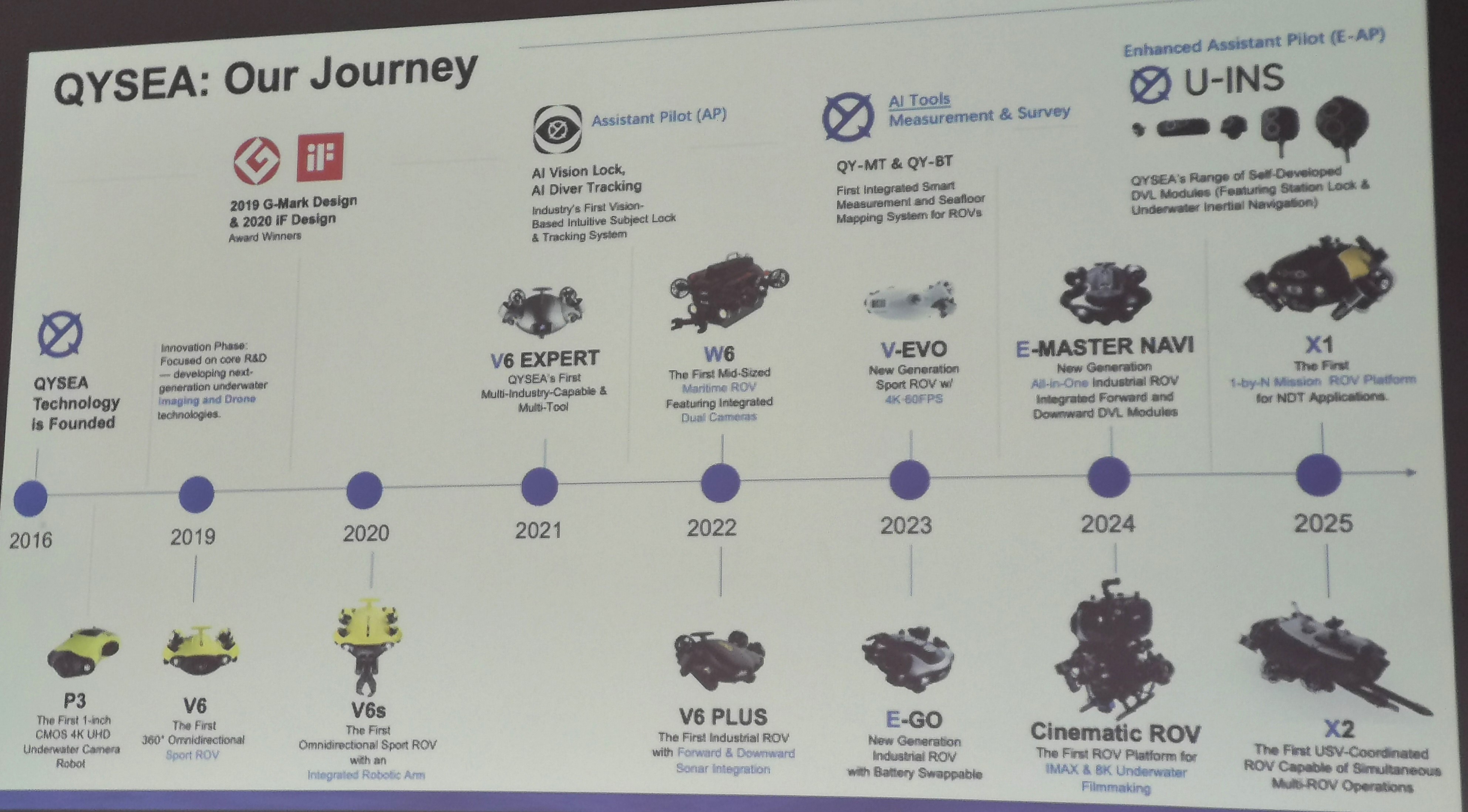
Можно заметить, как компания постепенно развивает свои технологии, что отражается в появлении все новых ТНПА и полезной нагрузки для них.
Fifish X1
В этой публикации остановлюсь на модели Fifish X1 - «рабочей лошадке» компании на текущий период.
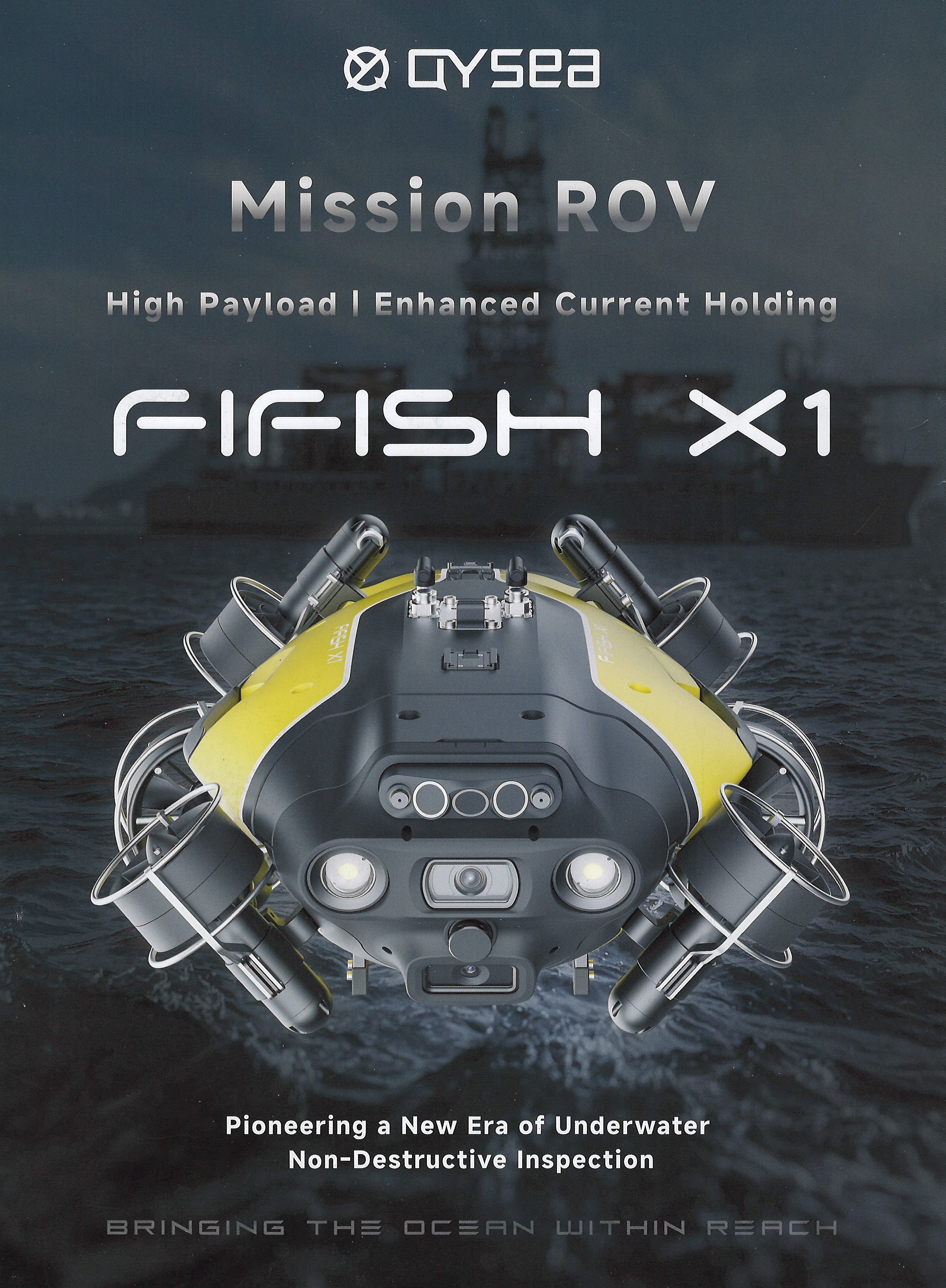
Брошюра компании Qysea
Fifish X1 компания относит к классу «миссионных» ТНПА (ROV). Отмечают такие его возможности, как способность брать на борт сравнительно тяжелую полезную нагрузку, а также возможность удерживать позицию даже в условиях подводных течений. Аппарат предназначен не только для решения задач осмотрового типа, но также для подводного неразрушающего контроля.

Брошюра компании рекомендует аппарат как пригодный для использования на морских месторождениях, в контроле инфраструктуры, в судоходстве.
Система движителей

Система привода на основе 6 движителе с векторной компоновкой позволяет быстро заменять движители, если возникнет необходимость. Есть системы защиты от перегрузки по току, напряжению и моменту. Максимальная скорость в направлении вперед заявляется на уровне 4.5 узла (2.3 м/с). Максимальная тяга - 30 кгс.
Отмечается быстрая готовность к запуску.

Qysea Fifish X1, вид снизу; хорошо заметен DVL, который может обеспечивать движение аппарата на фиксированной высоте относительно дна.
Заявляемые особенности аппарата
- Гидродинамика. Бионическая гидродинамическая конструкция для снижения сопротивления среды, что позволяет получать более высокую энергоэффективность ТНПА, более высокую устойчивость в условиях течений.
- Управление питанием. Адаптивный, эффективный и энергосберегающий план управления питанием, что позитивно сказалось на автономности продукта.
- Точное управление. Автоматический базовый управляющий алгоритм; стабильное зависание и точное управление в пределах 360°; есть опция - иммерсивная подводная система с отслеживанием движения головы в VR и управлением жестами.
- Подводная связь. Недорогой миниатюрный гидролокатор с обработкой данных алгоритмами ИИ. Дистанционное управления, сопряженное с модемом 5G, позволяющее осуществлять полноценное удалённое управление в реальном времени.
- Подводная навигация. Собственная высокоскоростная система подводного позиционирования U-QPS.
- Двигательная система. Запатентованная энергосберегающая компоновка с 6 моторами. Двигательная система позволяет использовать аппарат в условиях течения со скоростью не более 4 узлов.
- Искусственный интеллект: ИИ в основе управления платформой; визуальный «захват» на базе ИИ; интеллектуальные подводные измерения (AFL - от automatic feature lock, автоматическая фиксация объекта на основе характерных точек; шкала дополненной реальности, что позволяет измерять объекты в кадре (с опорой на точки лазерного излучателя на ТНПА).
Устойчивость в условиях течения
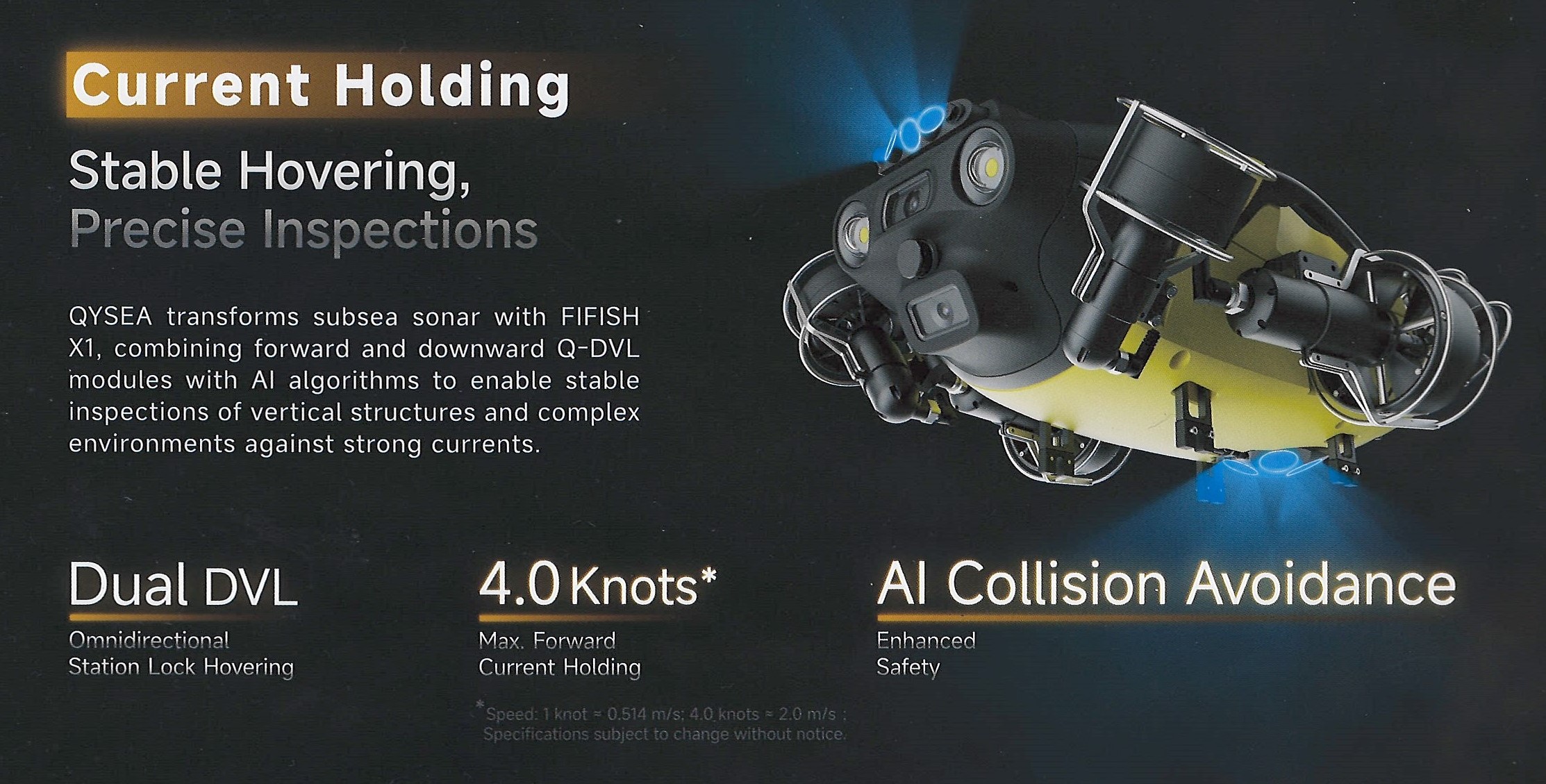
Действительно важная особенность аппарата - у него модули Q-DVL стоят как снизу, так и спереди. Данные с них обрабатываются алгоритмами ИИ, что позволяет производителю утверждать, что аппарат показывает возможность стабильного получения данных при инспекции вертикальных сооружений (борта судна, причала и т.п. даже при заметных течениях). То есть аппарату можно задать и расстояние до дна, и расстояние от «стенки» и он будет перемещаться эквидистантно по отношению как к оси Y, так и к оси X.
Заявляемая максимальная скорость встречного течения - до 4 узлов.
ИИ и Q-DVL также обеспечивают возможность автономного обхода препятствий.
Полезные нагрузки
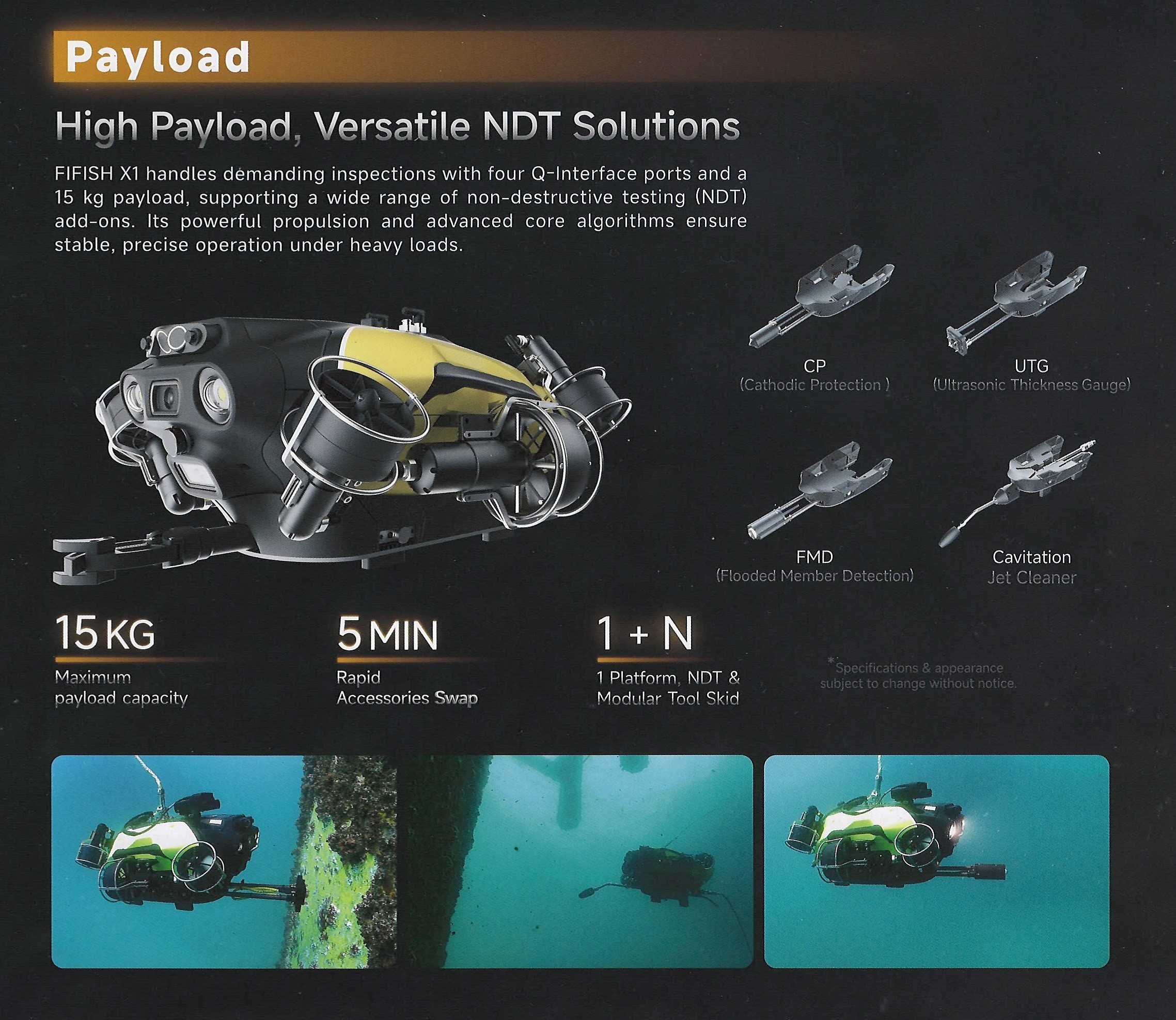
У ТНПА есть 4 интерфейсных порта Q-interface. Полезная нагрузка может достигать 15 кг.
Замена полезной нагрузки выполняется менее, чем за 5 минут
Компания называет Fifish X1 решением 1+N, подразумевая, что 1 - это сам аппарат, а N - это количество дополнительных полезных нагрузок, которые на него можно поместить с использованием стыковочной платформы.
Это, в частности, могут быть:
- детектор взрывоопасного газа
- электрическая щетка для очистки поверхностей
- устройство катодной защиты (CP)
- ультразвуковой тощиномер (UTG)
- водяная пушка
- модуль с роботизированным манипулятором

водяная пушка и UTG (ультразвуковой толщиномер)

UTG (толщиномер), FMD (от англ. flooded member detection - обнаружение внутренних повреждений подводной конструкции); водяная пушка; ТНПА Fifish X1, кабель-трос на катушке - отмечу ручки для переноски и колесики, что удобно

Детектор FMD (от англ. flooded member detection - обнаружение внутренних повреждений подводной конструкции)
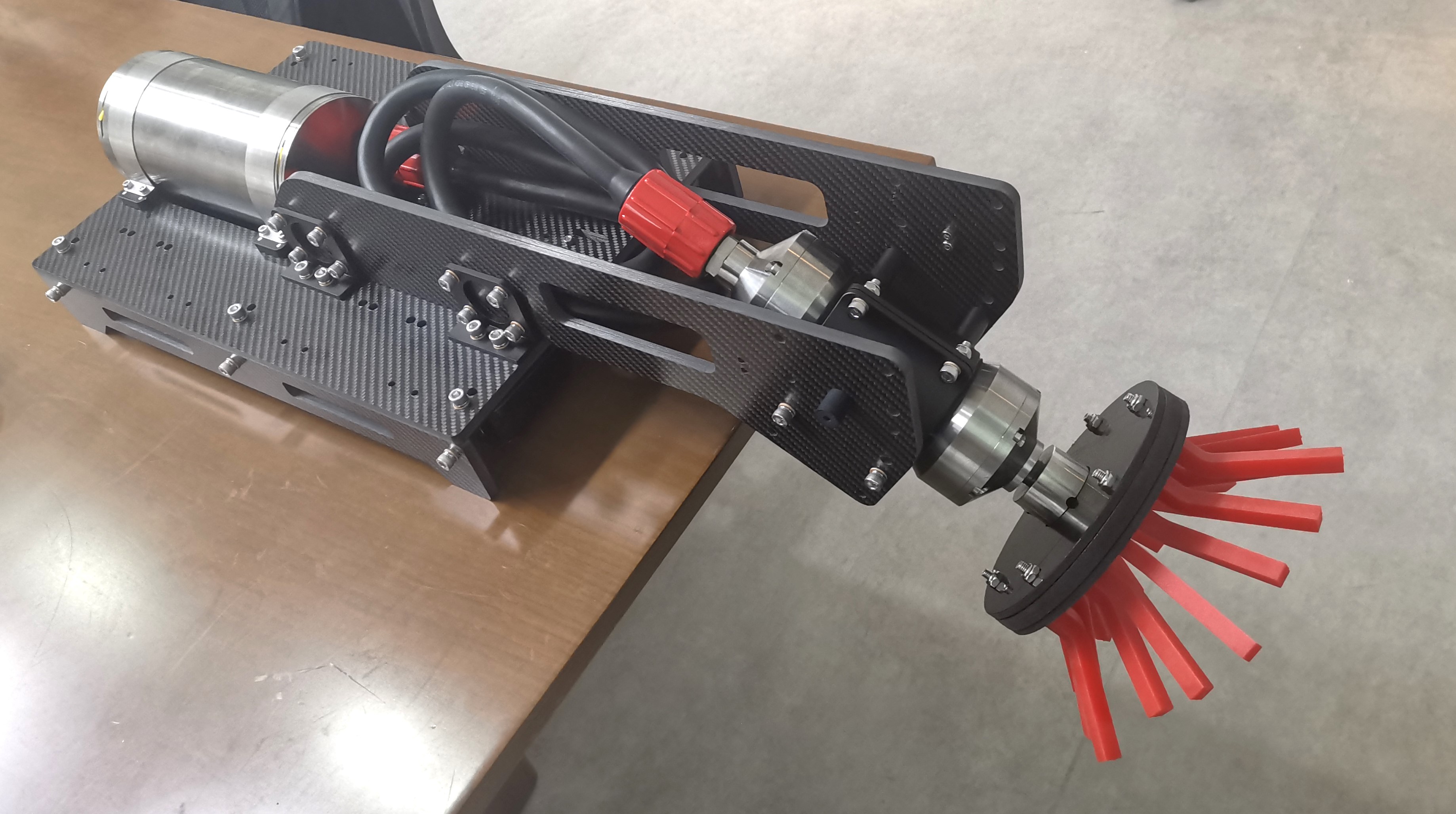
Электрическая щетка для очистки объектов под водой, рабочий прототип

Устройство фиксации кабель-троса на верхней плоскости аппарата

Проверка водяной пушки перед работой
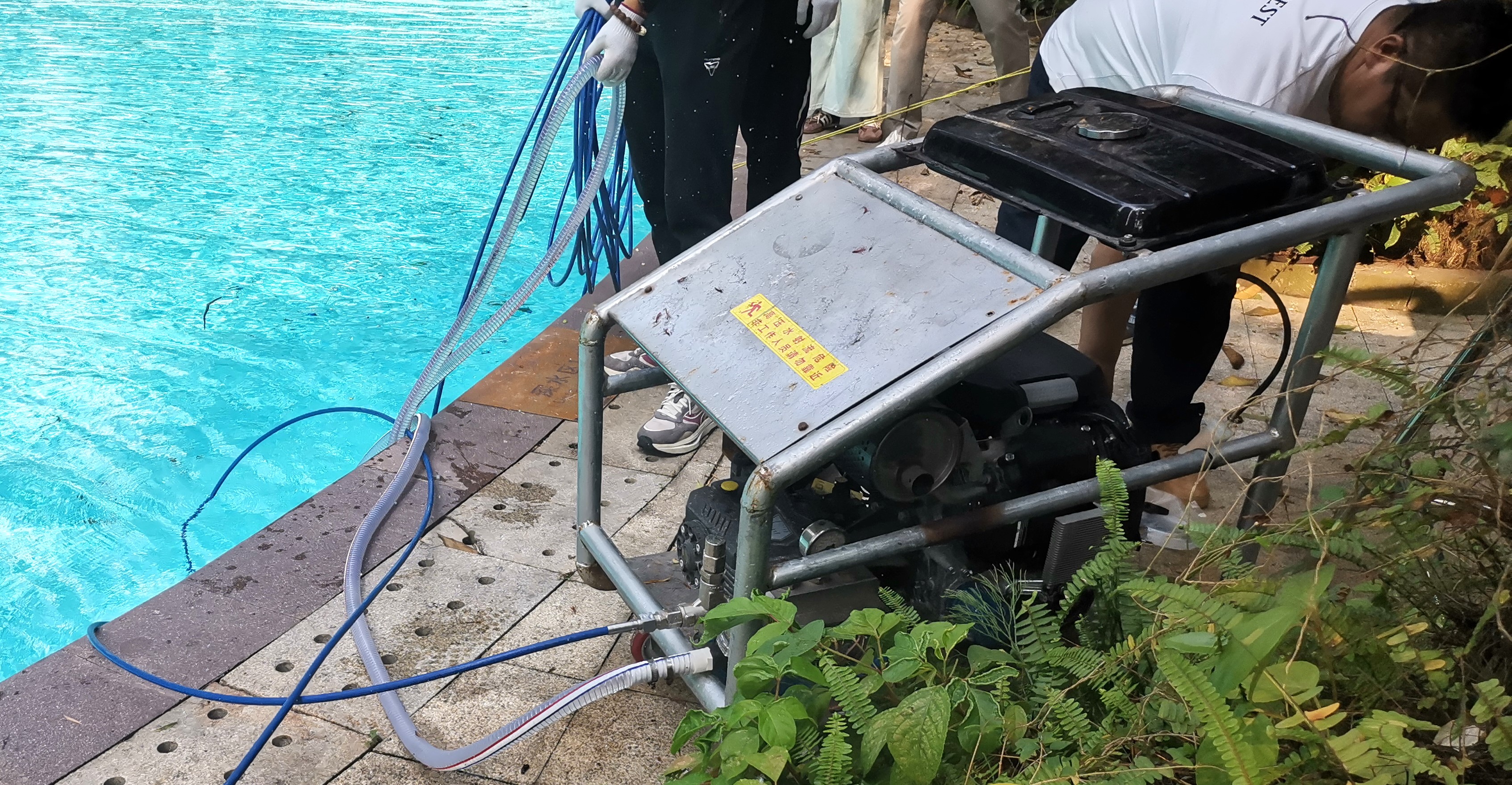
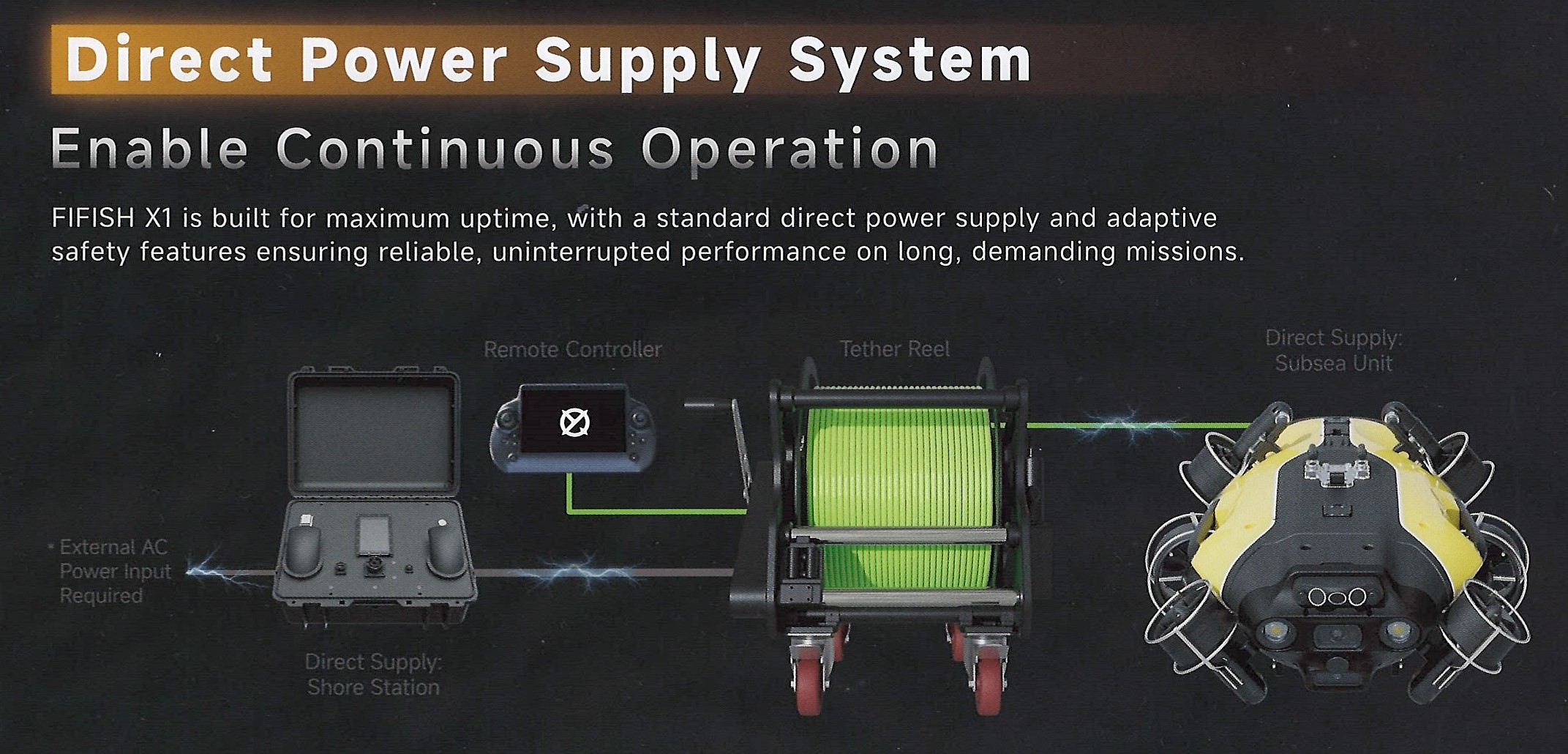
Система энергопитания ТНПА создавалась с идеей обеспечения длительной бесперебойной работы аппарата. Ее элементы показаны на картинке.
Система рассчитана на подключения к обычной промышленной сети переменного тока. Но также можно запитать ее, например, от «павербанка» - аккумуляторной батареи.
Например, от такой:

Интерфейсная панель аккумуляторного блока питания ТНПА

Аккумуляторный блок питания ТНПА

Аккумуляторный блок питания ТНПА (опять же отмечу ручки и колесики - эргономично)


Подводная навигация
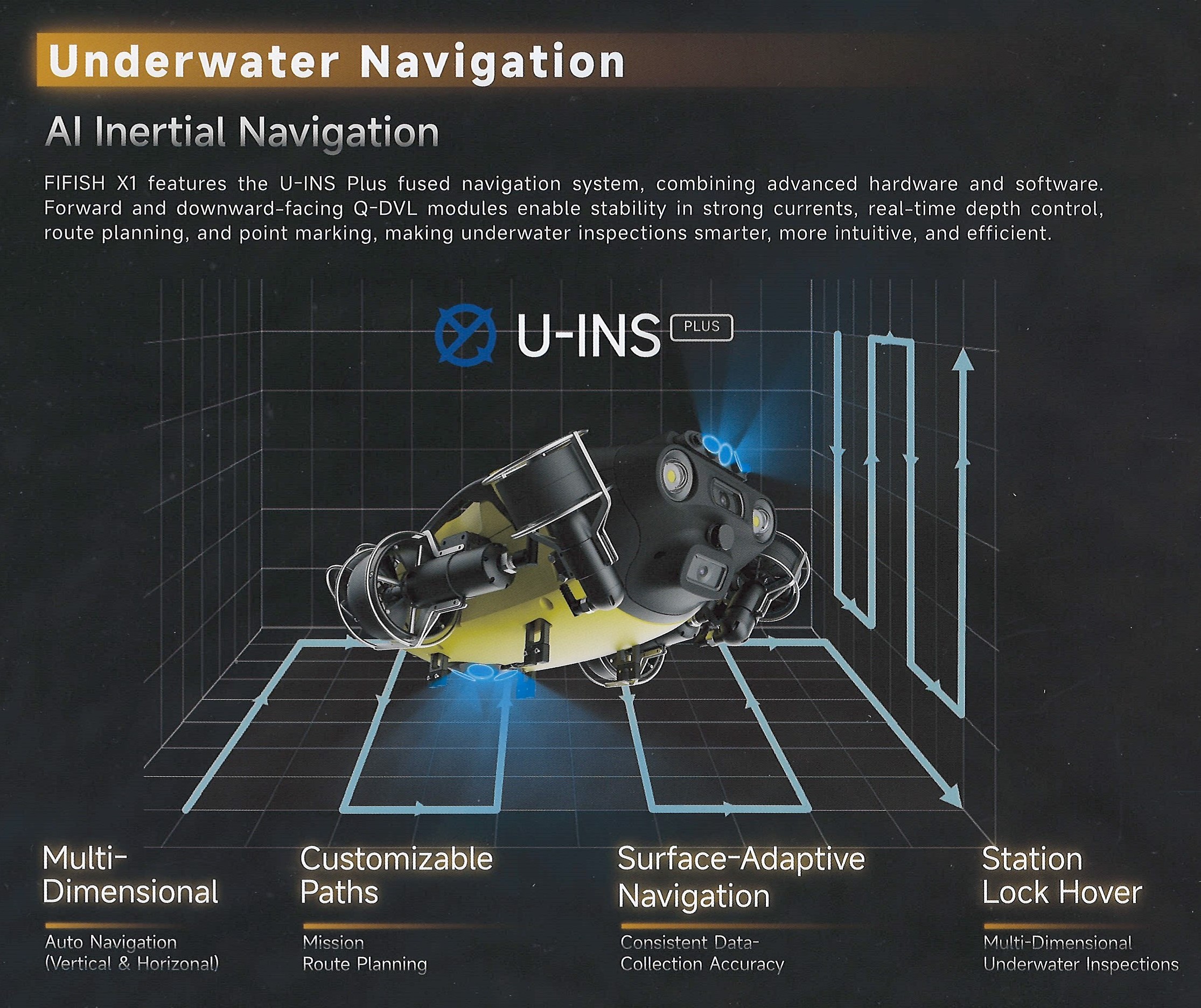
FIFISH X1 оснащён гибридной навигационной системой U-INS Plus, объединяющей аппаратные и программные решения. Передние и нижние модули Q-DVL обеспечивают стабильность в условиях течений, контроль глубины в реальном времени, планирование маршрутов и маркировку точек.
Система U-INS PLUS обеспечивает:
- Фиксация положения (Station Lock) с зависанием
- Настраиваемые траектории движения
- Поверхностно-адаптивная навигация
- Автономное выполнение миссии
- Стабильная точность сбора данных
- Вертикальные и горизонтальные подводные инспекции
- Планирование маршрута
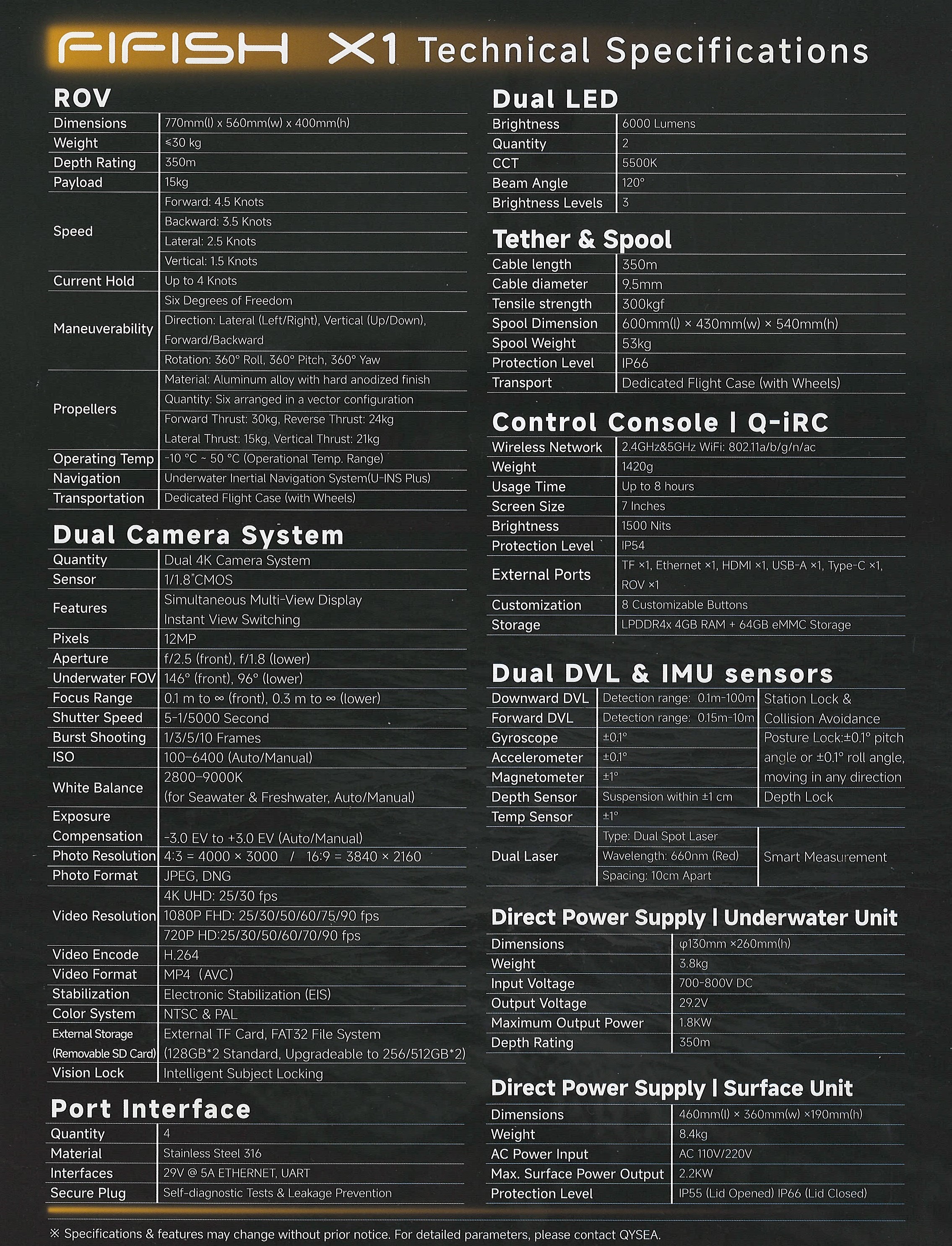
Подробные характеристики
Система Q-Pilot
Интеллектуальный круиз-контроль и удержание позиции
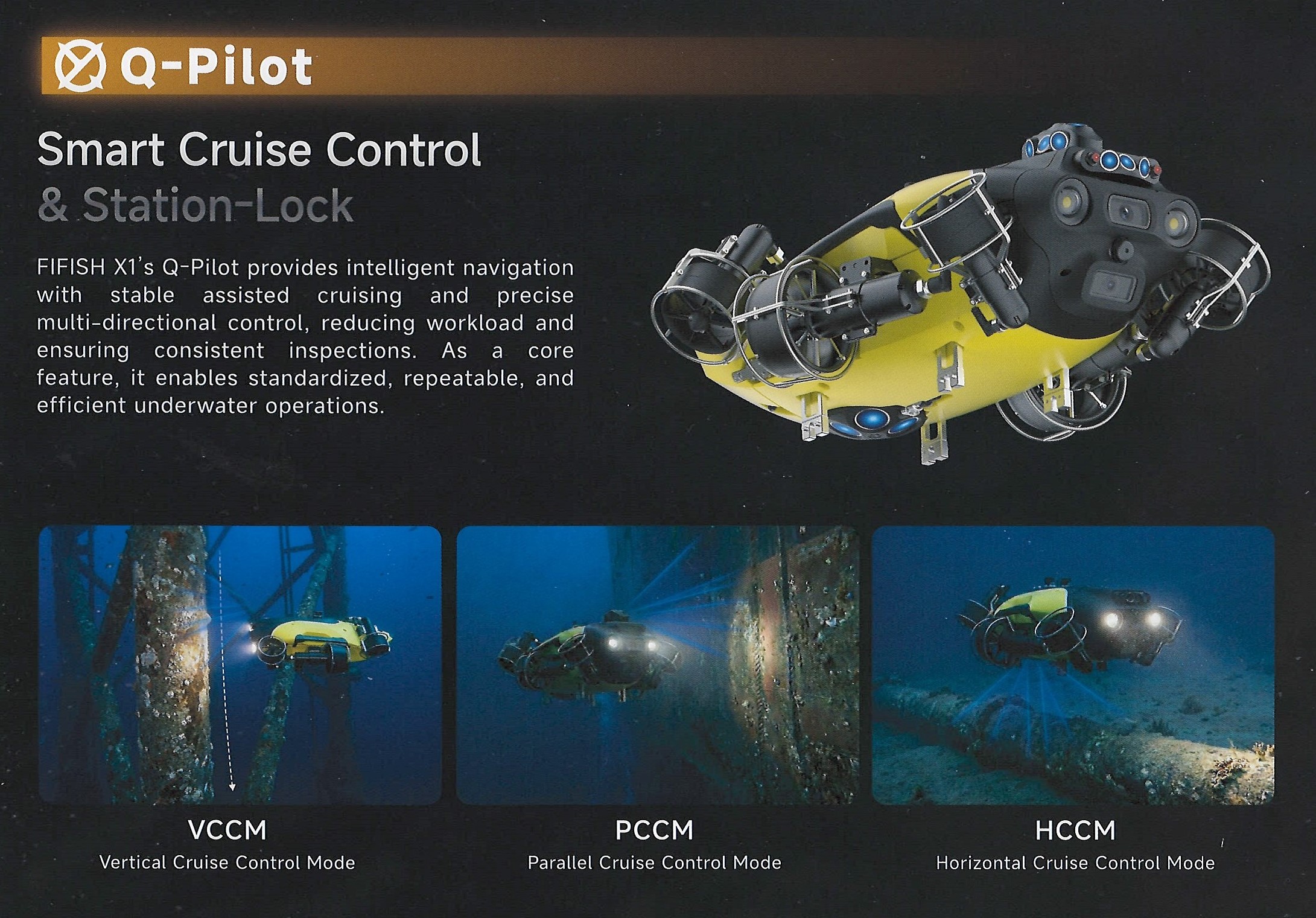
Fifish X1 с системой Q-Pilot должен обеспечивать интеллектуальную навигацию со стабильным управляемым движением, что снижает нагрузку на оператора (если он освоил соответствующие режимы управления). Система особенно удобна для выполнения стандартизированных работ.
Режимы управления:
- VCCM — Режим вертикального круиз-контроля (от англ. Vertical Cruise Control Mode)
- PCCM — Режим параллельного круиз-контроля (от англ. Parallel Cruise Control Mode)
- HCCM — Режим горизонтального круиз-контроля (от англ. Horizontal Cruise Control Mode)
((Обратите внимание на третий блок Q-DVL на картинке - кроме нижнего и фронтального, еще и боковой))
Пульт управления Q-iRC | Индустриальное решение управления

Операторы могут оптимизировать задачи с помощью интеллектуальных «горячих» клавиш, отслеживать несколько потоков данных и подключать дополнительные устройства через универсальные цифровые интерфейсы.
Основные характеристики пульта:
- 7-дюймовый яркий экран 1500 нит (на солнце бликует, к сожалению)
- До 8 часов непрерывной работы
- 8 многофункциональных кнопок
- Возможности расширения для анализа данных и координации в реальном времени
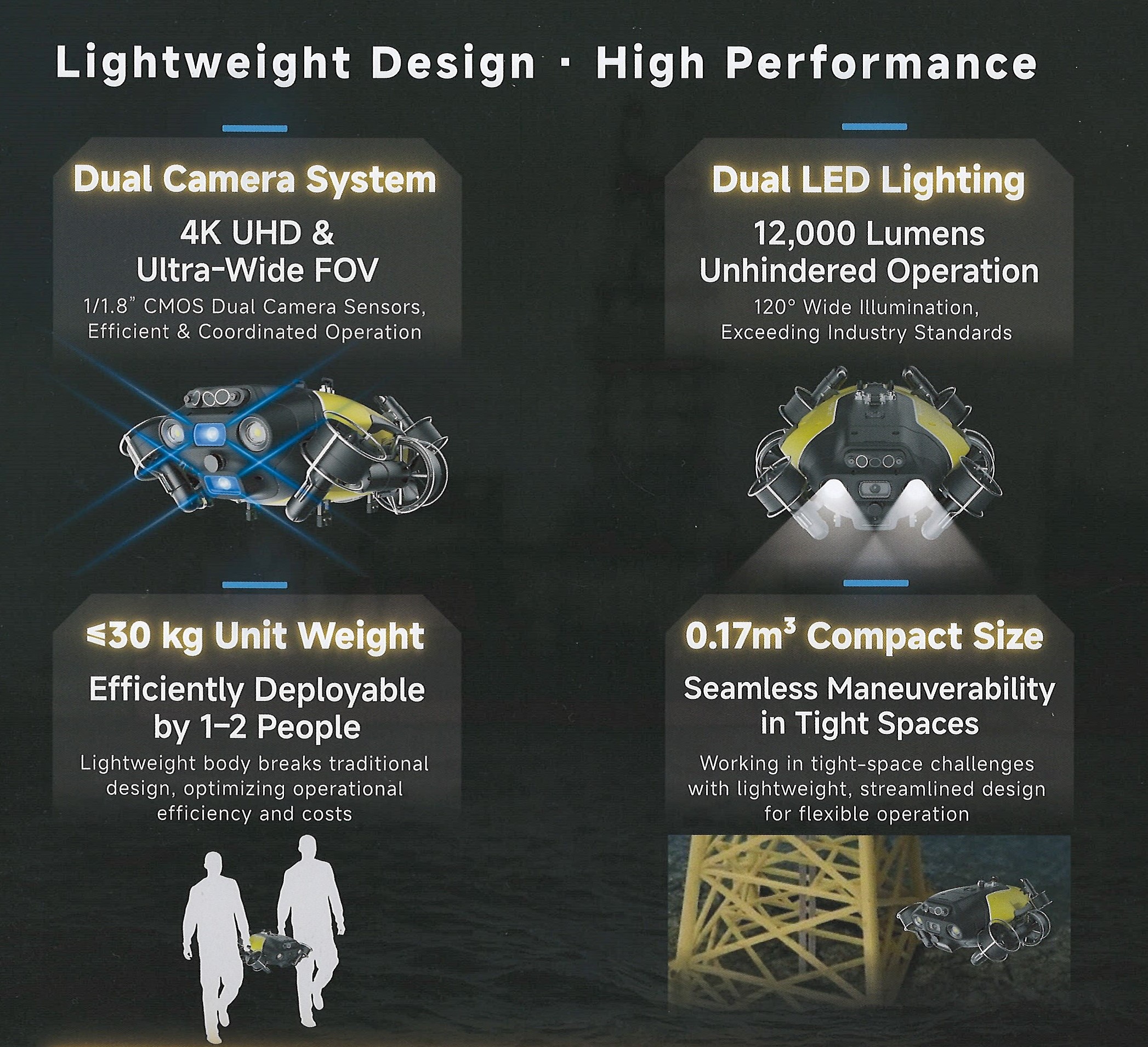
Существенные особенности аппарата X1
Двойная камера 4K UHD и широкое поле зрения (датчики КМОП 1/1,8 дюйма)
Двойная светодиодная подсветка - 12 000 люмен
Большой освещаемый сектор 120°
Вес устройства ≤30 кг; Компактный размер 0,17 м³
Как следствие - возможность развертывания ТНПА силами 1–2 человек
За счет легкого и обтекаемого корпуса и схемы расположения двигателей - выше маневренность ТНПА в ограниченном пространстве.
Варианты промышленных применений
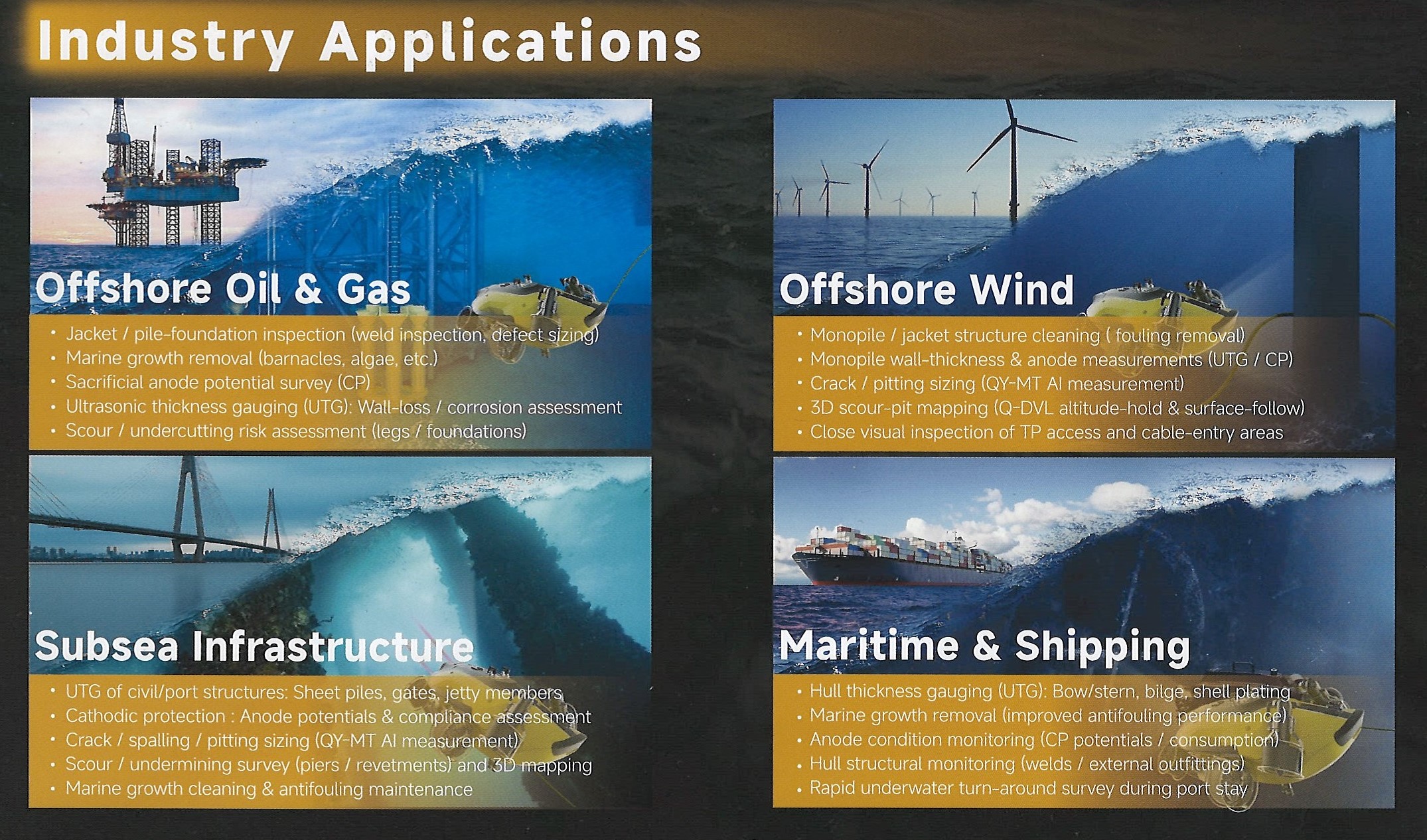
Вряд ли мне стоит останавливаться на этой теме подробно в силу очевидности. Впрочем, для полноты картины, давайте пробежимся и по ней. Заранее извините за возможные ошибки в терминах, я не силен в дефектоскопии.
Нефтегазовая отрасль на шельфе
- Инспекция опор и свайных фундаментов (контроль сварных швов, определение размеров дефектов)
- Удаление морских обрастаний (балянусов, водорослей и т.д.)
- Съёмка потенциала жертвенных анодов (катодная защита)
- Ультразвуковая толщинометрия: оценка потери толщины стенки и коррозии
- Измерение толщины стенок моноподстав и состояния анодов (ультразвуковая толщинометрия / катодная защита)
- Оценка рисков подмыва и размыва основания (опор/фундаментов)
Офшорная ветроэнергетика:
- Очистка конструкций моноподстав и опор (удаление обрастаний)
- Измерение толщины стенок моноподстав и состояния анодов (ультразвуковая толщинометрия / катодная защита)
- Оценка размеров трещин и питтингов (AI-измерение QY-MT)
- 3D-картографирование размывов (удержание по высоте Q-DVL и следование рельефу)
- Детальный визуальный осмотр зон доступа к переходным секциям и кабельным вводам
Подводная инфраструктура:
- Ультразвуковая толщинометрия гидротехнических и портовых сооружений: шпунтовых свай, затворов, причальных элементов
- Катодная защита: оценка потенциала анодов и соответствия требованиям
- Оценка размеров трещин, отслоений покрытия, питтингов (AI-измерение QY-MT)
- Съёмка размывов и подмывов (опоры мостов, берегоукрепительные сооружения) и 3D-картографирование
- Очистка от морских обрастаний и противообрастающее обслуживание
Морской транспорт и судоходство:
- Измерение толщины корпуса судна (ультразвуковая толщинометрия): нос/корма, скуловые части, наружная обшивка
- Удаление морских обрастаний (повышение эффективности противообрастающей защиты)
- Мониторинг состояния анодов (потенциал катодной защиты / износ)
- Мониторинг состояния корпуса (сварные швы, наружное оборудование)
- Быстрая подводная инспекция в период стоянки в порту
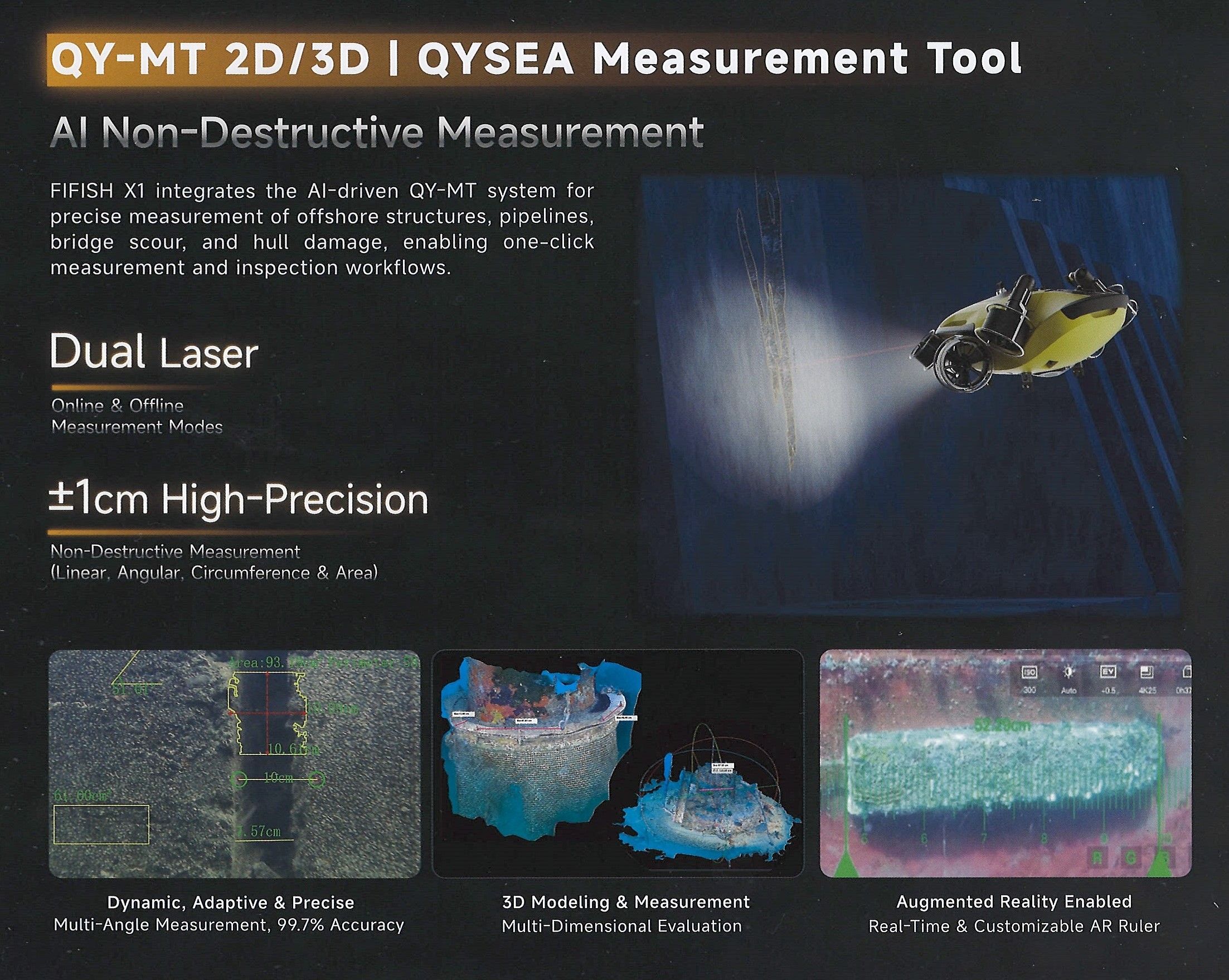
QY-MT 2D/3D - измеритель размеров объектов Qysea
Очень интересная особенность аппаратов и ПО компании. Система на основе ИИ позволяет вести точные измерения морских сооружений, трубопроводов, размывов мостов и повреждений корпусов судов, обеспечивая однокнопочное измерение и рабочие процессы инспекции.
Основана на использовании двойного лазера. Обеспечивает измерения с точностью до плюс-минус 1 см, причем не только линейные, но также длины окружности, площади, угловые. На основе измерений доступно 3D-моделирование. Очень интересный функционал.
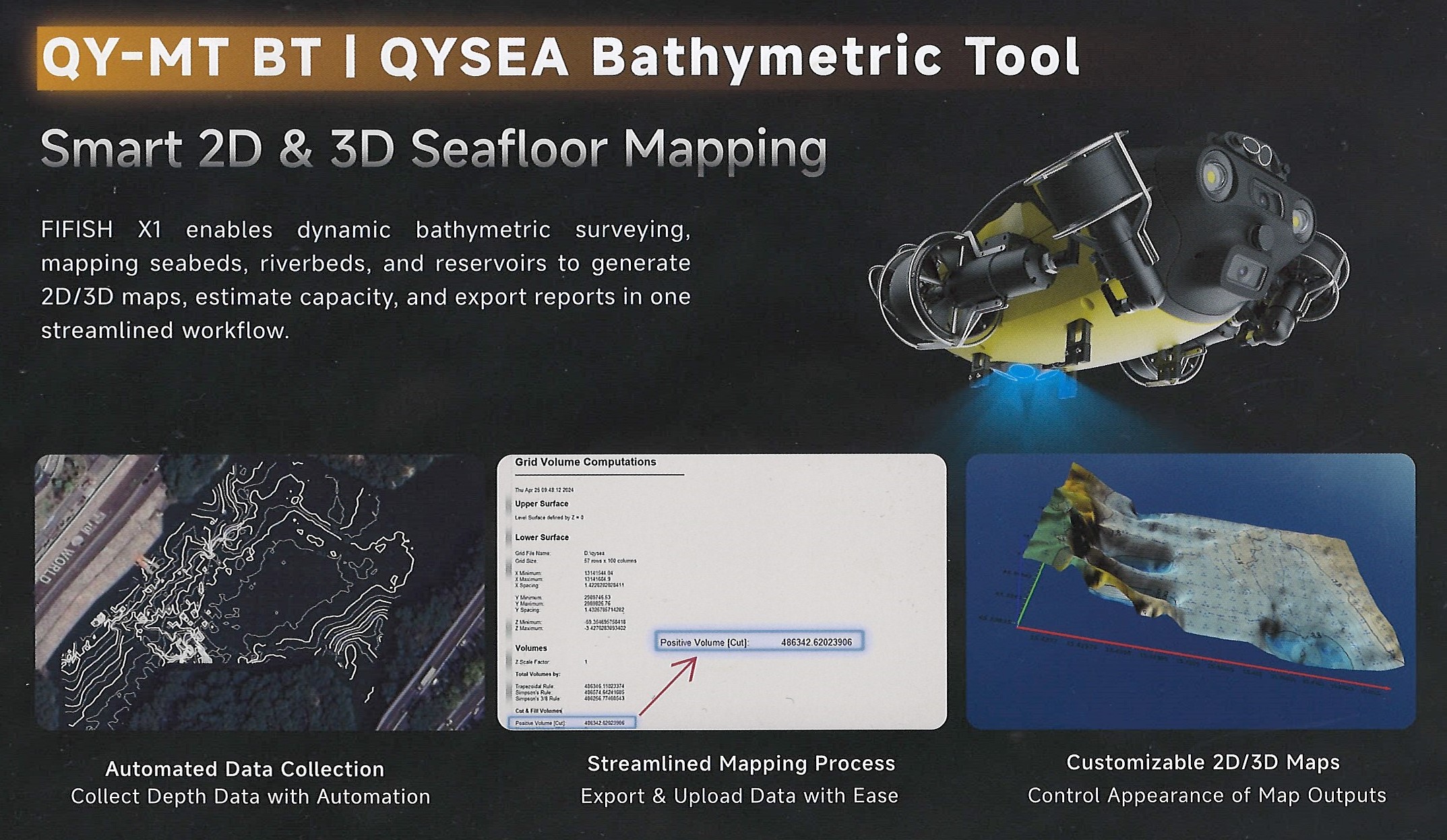
QY-MT BT - батиметрический инструмент
Fifish X1 обеспечивает динамическую батиметрическую съёмку, картографирование морского или речного дна, водохранилищ для создания 2D/3D карт, оценки объёмов и экспорта отчётов в рамках одного оптимизированного рабочего процесса.
Вычисления объёмов ведется «по сетке» (то есть Grid Volume Computations), что позволяет, например, оценить объем выемки грунта.
- Автоматизированный сбор данных о глубине
- Оптимизированный процесс картографирования (упрощенный экспорт и загрузка данных)
- Настраиваемые пользователем 2D/3D карты (управление отображением создаваемых карт)
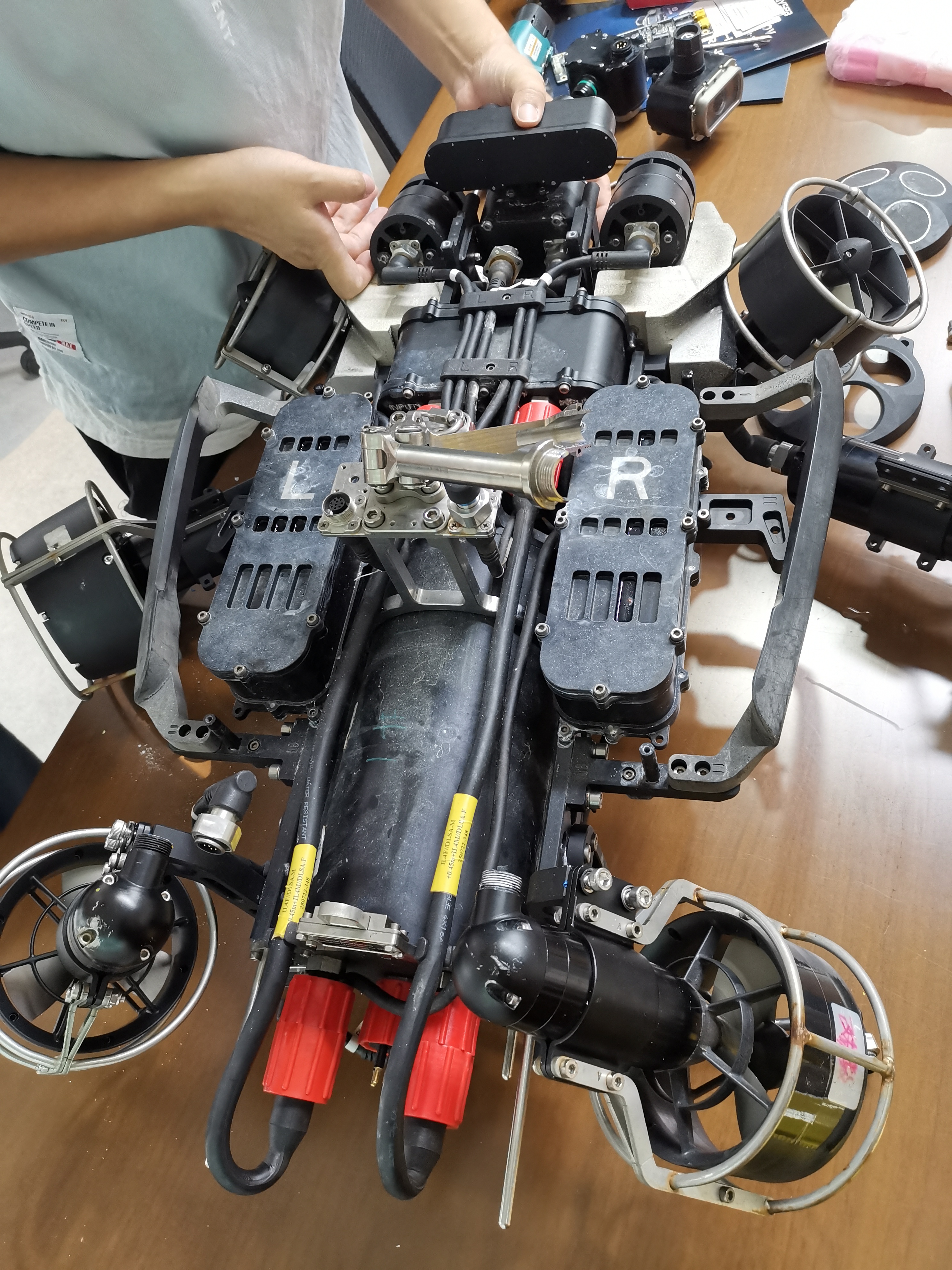
Под "капотом" X1
На этом, пожалуй, тема исчерпана. В качестве краткого вывода - аппарат рабочий и весьма интересный по соотношению цена-качества, хотя и не без недочетов (а у кого их нет). Компания Qysea продолжает разработки, скоро станет доступен для покупки и X2 (мы его уже видели в железе).
Надеюсь, вам было интересно, постараюсь продолжить этот цикл публикаций, так что подписывайтесь на или на канал . \\









