
Российский Тетработ успешно справился с испытаниями
11.09.2017Российские разработчики из частной компании ООО "Крейф" (Сыктывкар) провели успешное тестирование оригинальной конструкции шагающего механизма «Тетработ».
Передвижение робота при помощи собственных «ног» - это тяжелая задача во всех смыслах. Создано немало прототипов роботов, способных перемещаться по пересеченной местности и по лестницам. Тем не менее, этот тип роботов пока еще не вышел из стен лабораторий на массовый рынок. Практически все серийно выпускаемые мобильные сервисные роботы построены на колесной или гусеничной тяге, что ограничивает разнообразие их применения. Этому есть ряд причин: высокая стоимость шагающих роботов, сложность управления ногами при переходе через препятствия, сложность и низкая надежность конструкций.
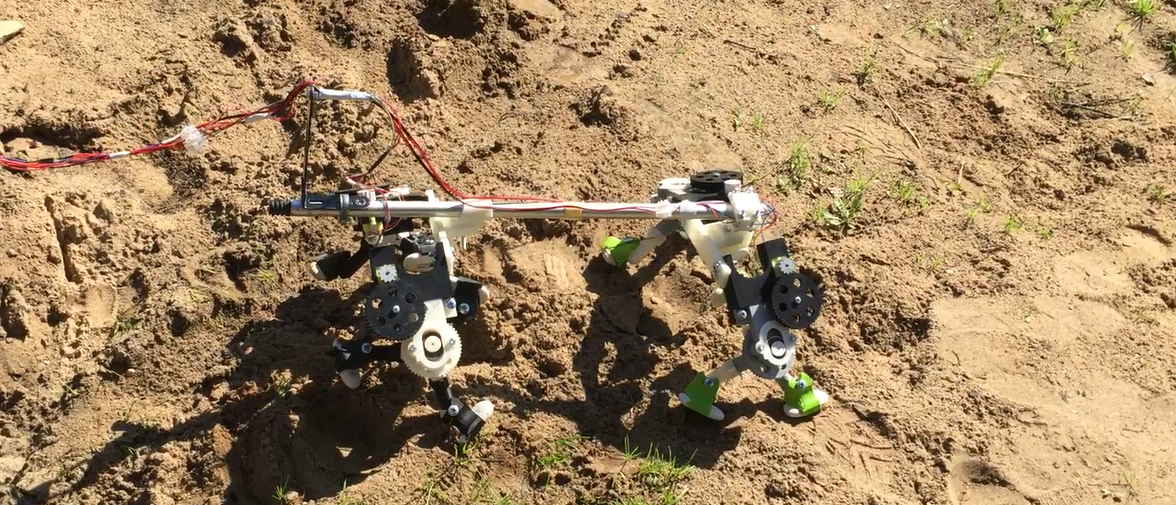
Российский проект «Тетработ» использует уникальный, запатентованный механизм перемещения с помощью движителей, напоминающих наклоненные четырехгранные пирамиды. Отсюда и название «тетработ» - от слов тетраэдр и робот. Получившийся механизм «ног» отличается существенной простотой конструкции и минимальным количеством сочленений. Колебания при ходьбе сглаживает компенсатор.

Разработанный механизм не требует использования дорогостоящих пневмо- и гидроприводов, обладает повышенной надежностью и экономичностью, способен преодолевать сравнительно высокие (относительно своих размеров) препятствия, может адаптироваться к различным неровностям поверхности, неприхотлив к суровым климатическим условиям.
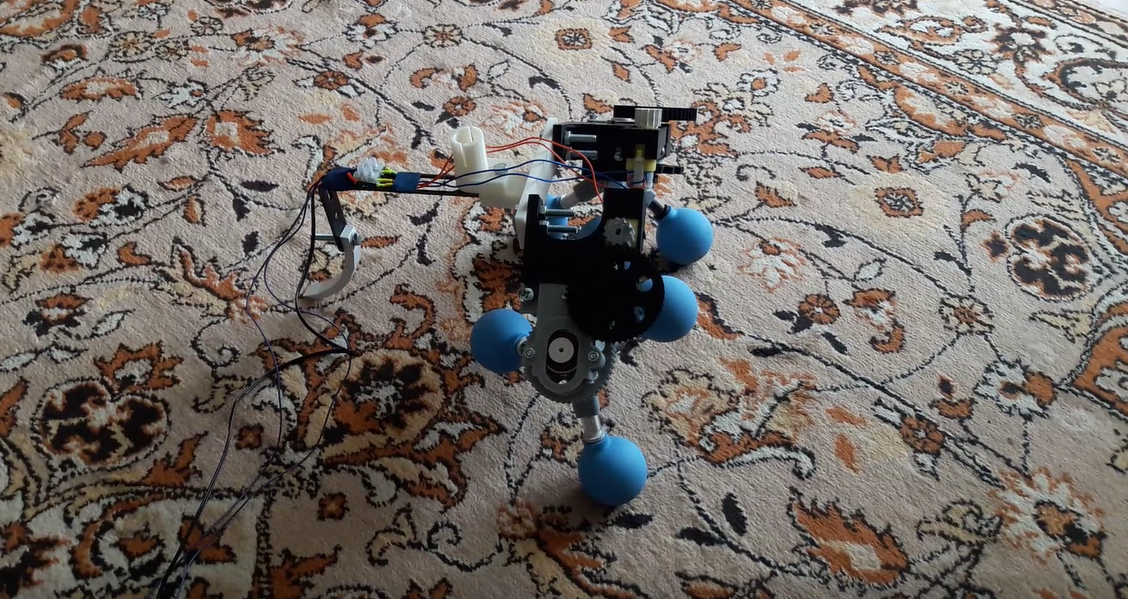
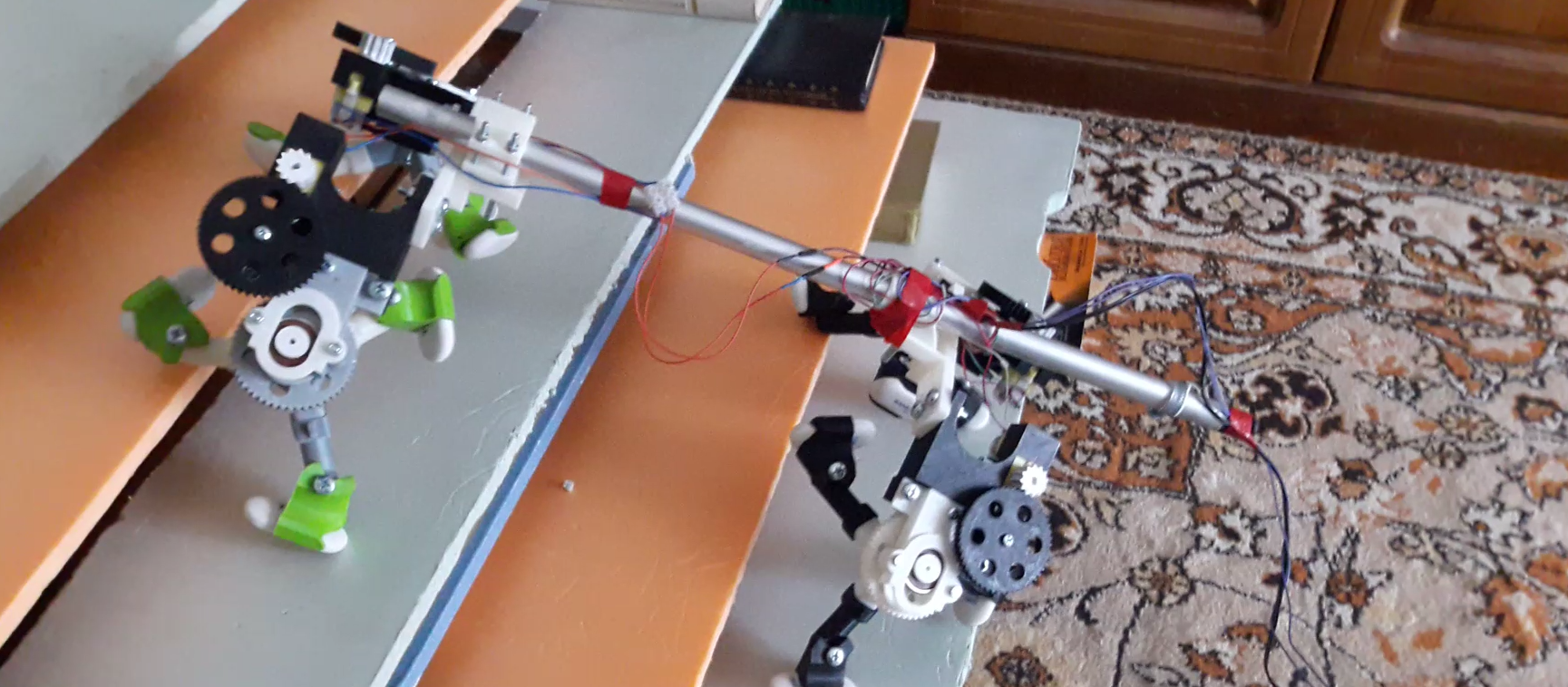
Созданные на 3D-принтере прототипы шагающей платформы снабжены двумя или четырьмя рабочими конечностями, которые приводят в движение маломощные электродвигатели, по 6 Вт на каждую. Несмотря на относительно низкую мощность двигателей, оба прототипа показали отличные результаты передвижения по пересеченной местности, а также смогли перебраться через различные препятствия. В частности, были проверены возможности перемещения по лестничным маршам, перетаскивания грузов и маневрирования. Прототипы опробованы с двумя типа «башмаков» - в виде резиновых шаров, и в виде стоп.
С видеоотчетами результатов испытаний прототипов Тетработа с различными препятствиями можно ознакомиться на сайте проекта:
Сейчас перед разработчиками стоит задача создать полностью автономный прототип Тетработа с мощными электродвигателями, повышенной грузоподъемностью, размахом ног до 0,5 метра, улучшенной трансмиссией и высокими скоростными характеристиками для проведения обширных полевых испытаний. Идет поиск инвесторов для реализации проекта.
В дальнейшем разработанная платформа может быть снабжена оптическими датчиками, сенсорами, дальномерами, управляющими контроллерами, программным обеспечением, дополнительными манипуляторами и прочими элементами для превращения шагающей платформы в высоко-проходимое специализированное устройство, для выполнения требуемых заказчиком задач.
Разработка недорогого и надежного шагающего механизма особенно актуальна в России для освоения тундры, Арктики и Дальнего Востока.
+ +









