
Роевые системы осваивают быструю автономную навигацию
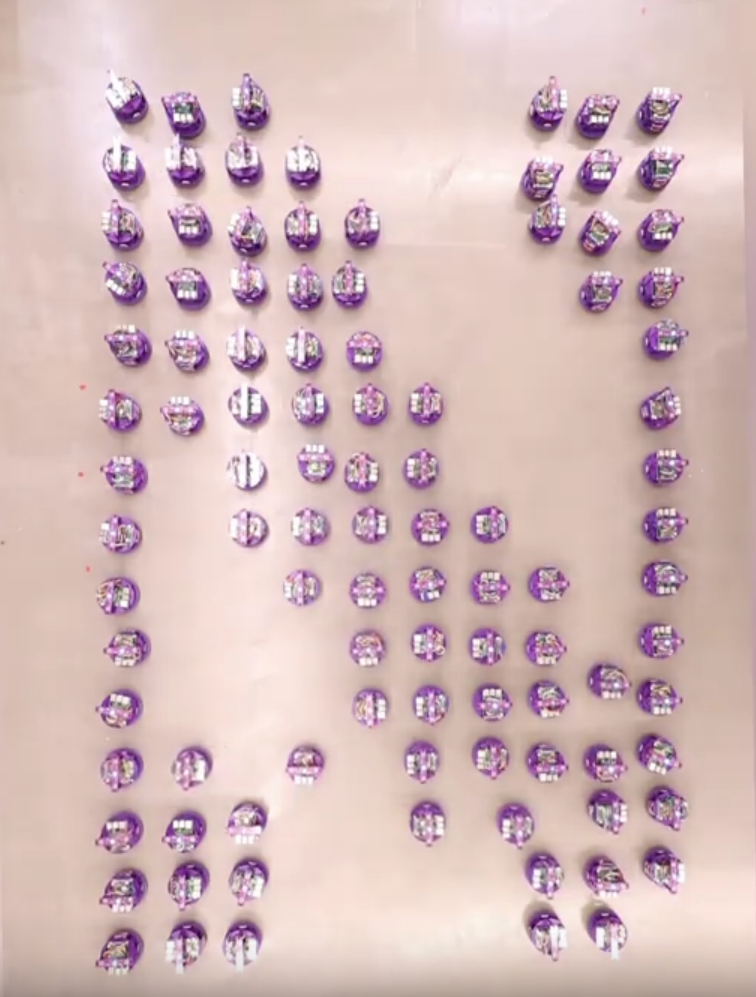
05.03.2020Флотилии робомобилей сулят минимизацию загрязнений и перепроизводства и оптимизацию дорожной ситуации, исключающую львиную долю аварий и пробок. Исследователи из Северо-Западного университета США представили алгоритм автономной навигации для децентрализованных групп небольших роботов: сотня устройств формирует любые фигуры в пределах 60 секунд, причем отдельные роботы не задерживают и не мешают своим “коллегам”.
Изображение:
Роботы принимают решения самостоятельно и не имеют централизованного контрольного пункта: отказ одного устройства практически не влияет на итоговое функционирование роя. Алгоритм рассматривает пространство как решетку - системы распознают роботов-коллег и уточняют, занята ли соседняя “ячейка”. Роботы воспринимают лишь свое непосредственное окружение и принимают решения локально - подход облегчает масштабирование роя.
Разработчики провели симуляцию, рассматривающую взаимодействие более 1 тыс. роботов - алгоритм не утратил своей эффективности и в виртуальности.
Вероятнее всего, подобные алгоритмы будут использоваться в рамках диспетчирования военных и сельскохозяйственных роботов, автономных логистических систем, а со временем - при автоматизации автотранспорта.
По материалам:
----
За новостями робототехники и ИИ удобно следить в - основные новости; телеграм-трансляции, посвященных робототехнике, больше ссылок на новости и репортажи - в телеграм-канале - подпишитесь на него прямо сейчас, а если пользуетесь Facebook, то лайкните страницу .








