
Применение подводных глайдеров для геологоразведки
10.09.2018По традиции конец лета – начало осени самое время для подведения результатов научных и опытно-конструкторских работ, различных конкурсов и соревнований. Недавно мы писали про первые . 5 сентября были определены победители проводимого .
Французская энергетическая компания Total, один из мировых лидеров в разведке и добыче углеводородов, также подвела . В этом году среди 60 конкурсных работ в тройку победителей вошел .
По замыслу разработчиков, позволят значительно повысить эффективность поиска новых месторождений путём сокращения расходов на глубоководную разведку и снижения рисков в области охраны труда. Для этого аппарат оборудован специальными датчиками, фиксирующими проявления залежей нефти и газа.
Суть метода
Значительная часть еще не найденных в мире запасов углеводородов находится под водой. Однако, геологоразведка морских месторождений – дело крайне трудоемкое и высокозатратное. Именно поэтому так важна разработка гибких, селективных технологий, позволяющих более эффективно находить перспективные участки: нефтегазоперспективные зоны и зоны нефтегазонакопления для их последующего изучения и разработки.
Традиционно для этих целей используются сейсморазведка, требующая наличия специализированных судов. Несмотря на то, что мировой флот геофизических судов неуклонно растет, данных сейсморазведки по приполярным областям меньше, чем по другим районам, и флот работающих там судов также очень невелик, так как лед ограничивает маршруты их движения. В Арктике для выполнения работ необходимо, чтобы суда имели достаточно высокий ледовый класс, что существенно повышает затраты на съемку. Кроме того, качество данных ухудшается из-за помех, создаваемых плавучими льдами.
представляет собой автономный необитаемый подводный аппарат, который не имеет движителя и перемещается в воде за счет изменения плавучести, а управляется в основном за счет изменения центра тяжести. Перемещаясь со скоростью 0,2-0,3 узла в коридоре глубин от 0 до 1000 метров, аппарат может непрерывно находится в воде в течение нескольких месяцев, выполняя заложенную оператором миссию. Связь передается через спутник и GPS. При этом необходимость в наличии специализированного судна обеспечения полностью отсутствует.
Несмотря на то, что углеводороды залегают глубоко в твердых породах земной коры, через трещины и разломы существуют естественные выходы нефти и газа, в водную среду и в том числе и на водную поверхность, что свидетельствует о высокой вероятности наличия в данном районе перспективных месторождений. Причём это не просто теоретические проработки, а научно доказанные факты, в том числе и отечественными учёными, так Тихоокеанский океанологический институт ДВО РАН в течении длительного периода проводит успешную научную работу по мониторингу газогеохимических полей в Тихоокеанском регионе (включая и Арктические широты), о чём убедительно информирует в статье «Газогеохимические поля и распределения природных газов в Дальневосточных морях» журнала , .pdf.
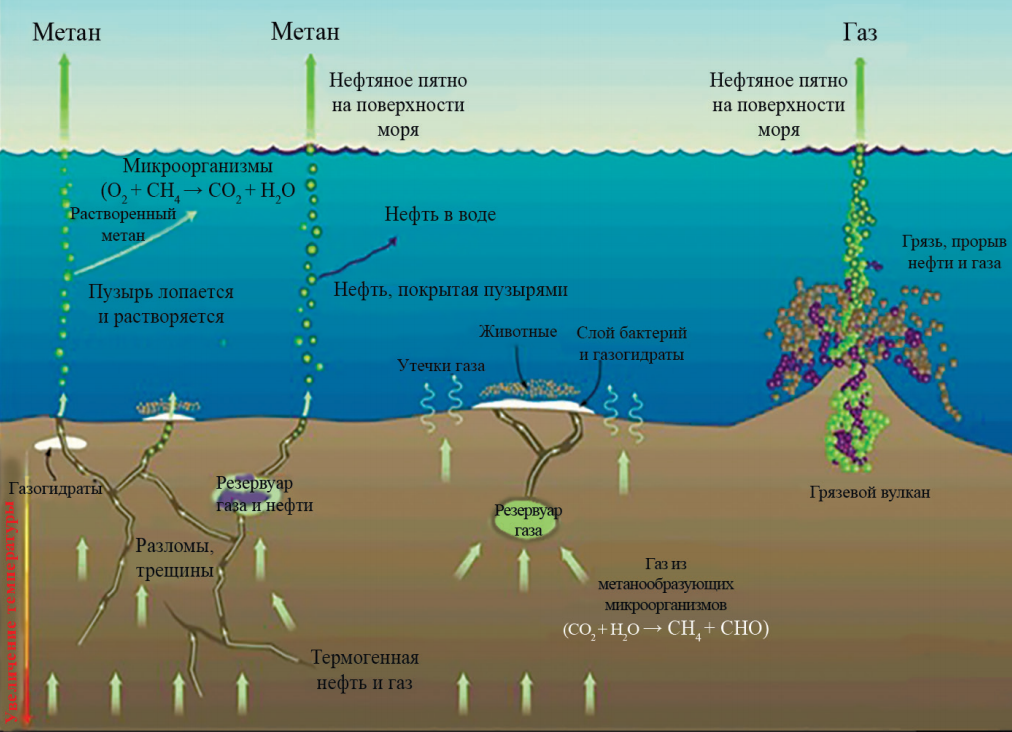
Иллюстрация к статье «Газогеохимические поля и распределения природных газов в Дальневосточных морях» журнала «», 2018, № 1 (25) наглядно демонстрирующая движение газа в донных отложениях и водной толще
В настоящее время для идентификации таких выходов нефти и газа широко применяются данные космической радиолокации. Радиолокационные изображения, полученные с космических спутников, позволяют идентифицировать на водной поверхности нефтяные пятна естественного происхождения. Однако, данный метод не дает возможности «увидеть» нефтяное пятно, находящееся в толще воды. Применение глайдеров, разработанных для Total французской компанией Alseamar, позволит исследовать подводное пространство на глубинах до 1000 м.
Подобная технология сбора данных высоко инновационна наименее затратна, более быстра и безопасна по сравнению со стандартными методами.
По сути глайдер – универсальная платформа-носитель с возможностью длительной миссии, что вкупе с предлагаемыми высокочувствительными бортовыми датчиками представляет собой настоящий технологический прорыв. Они позволяют обнаруживать, оценивать и наблюдать естественные выходы углеводородов с морского дна в реальном времени:
- Разработанный Franatech, датчик концентрации метана обеспечивает высокочувствительное обнаружение метана и быстрое время реакции: до 20 нмоль / л в течение нескольких секунд.
- Разработанный совместно исследовательским подразделением Средиземноморского института океанографии в Марселе датчик MiniFluo обнаруживает полициклические ароматические углеводороды (ПАУ) с высокой степенью точности - до 0,1 мкг / л для фенантрена.
Планы на будущее
Сейчас ведутся работы по интеграции на глайдер увеличенной полезной нагрузки, таких как датчик углекислого газа для геологоразведочных работ (дифференциация термогенного и биогенного газа) или мониторинга морских резервуаров углеводородов; акустический датчик, который мог бы обнаруживать подводные шлейфы метана; и доплеровский датчик скорости для измерения океанских течений.
Следующий шаг – возможность взятия проб в месте выхода углеводородов. И здесь возникает новый виток эволюции технологий, потому что традиционно манипуляторные комплексы и пробоотборники устанавливаются только на подводные телеуправляемые аппараты (ТПА), а автономные подводные беспилотники используются только для поиска, обследования и визуального мониторинга. Еще в 2016 году компании , который может работать как в режиме ТПА, так и в режиме автономного необитаемого аппарата (АНПА).
В ходе испытаний в бассейне лаборатории нулевой гравитации NASA была продемонстрирована успешная работа аппарата с поворотным инструментом (предназначенным для открытия клапанов устьевой арматуры скважины), что до сего момента было эксклюзивной прерогативой ТПА тяжелого, рабочего класса. В итоге на ежегодном нефтяном форуме компании-разработчики уже не просто демонстрировали образец, а уже предлагали к поставке готовое решение (АНПА с FSO), причем не за «космические» деньги, а в пределах разумных 60-80 тыс. долларов США за комплект FSO. Именно поэтому установка манипуляторов на подводные глайдеры также представляется реальной уже в обозримом будущем.
Упомянув об использовании FSO (Free Space Optics) – цифрового беспроводного канала оптической связи, необходимо отметить, что глайдеры планируется использовать в целях геологоразведки не единичными экземплярами, а «стаями» и отработки уже этих технологий идут на сей момент не менее активно. Так, в мае этого года британская компания ASV Global (один из мировых лидеров в безэкипажных плавсредствах) провела совместно с ранее упомянутой Sonardyne International и др. лидерами морской робототехники .
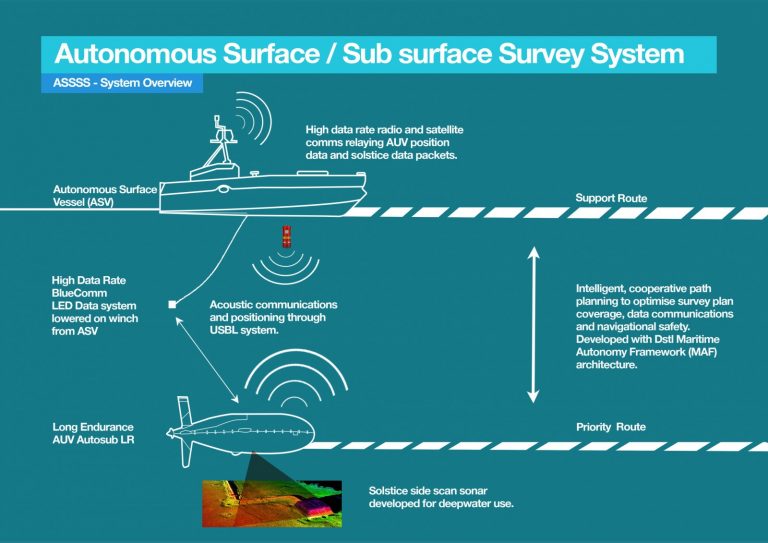
Иллюстрация .
При этом надо отметить, что не только не снижается темп и качество исследований и в области классических гидроакустических методов навигации и связи подводных аппаратов при групповом управлении, но и исследования ведутся применительно к специфичным условиям роботизированной сейсморазведки. Так в ранее упомянутом выпуске № 1 (25) журнала «Подводные исследования и робототехника» за 2018 г. размещена исключительно интересная статья «», являющаяся своеобразным отчётом по европейскому проекту WiMUST (программа H2020-ICT-2014-1) по развитию комбинированной системы позиционирования и связи в составе разрабатываемого мобильного комплекса подводной сейсмоакустической (геотехнической) разведки («стаи» АНПА и судна обеспечения).
Приятно осознавать, что практические отечественные разработки в этой области также ведутся, как по направлениям связи, например, работы СПбГМТУ в части гидроакустических модемов для подводной робототехники и «» по направлению позиционирования. Весной 2018 года , который уже сейчас готов для установки на типовой ТПА осмотрового или лёгкого рабочего класса и проходит адаптацию и переконфигурацию для сопряжения со специальным подводным аппаратом (СПА), а разрабатываемая 6-ая степень (дифферентующий привод) планируется как раз для интеграции на АНПА и далее на подводный глайдер.
Успешный опыт реальной эксплуатации
Подводные глайдеры уже испытывались для геологоразведки в реальных условиях. После первого тестового погружения на Кипре в 2015 году, глубоководные демонстрационные спуски были проведены в Анголе в ноябре 2017 года. Результаты 20-дневной миссии глайдера сравнили с проводимой параллельно радиолокационной съемкой. Вертикальные перемещения углеводородных флюидов по направлению к поверхности, обнаруженные глайдерами, идеально соответствовали местоположению естественного выхода нефти, определенного спутником.
«В тот же период и в партнерстве с ALSEAMAR мы подтвердили обнаружение метана, чьи шлейфы были идентифицированы ранее океаническим исследовательским институтом IFREMER с использованием многолучевых зондов в Бискайском заливе. – говорит один из разработчиков. – «Но приключение только началось: в разработке находятся новые подводные планеры для глубин 2500, а затем 6 000 метров. Мы видим широкие перспективы применения глайдеров для экологического мониторинга и экологической безопасности, особенно в условиях Арктического шельфа».
Отметим, что , Академия наук Китая в 9-й Китайской Арктической экспедиции 28 июля 2018 г. запустила в Беринговом море с борта ледокола “Xue Long” следующее поколение своих аппаратов типа «глайдер» модели “Haiyi”, способных погружаться до глубин в 7000 метров, в долговременную Арктическую экспедицию. Безусловно, одной из основных целей подобного проекта является набор статистической информации для дальнейшей разведки потенциальных месторождений полезных ископаемых.
В России разработки подводных глайдеров также активно ведутся. Проекты в области АНПА типа «Глайдер» на сентябрь 2018 г. имеют Cамарский Государственный Технический Университет (СамГТУ) самостоятельно и в рамках научно-производственной группы «МАКО»; Самарский национальный исследовательский университет им. С.П.Королева (СГАУ); Московский физико-технический институт (государственный университет) (МФТИ); Институт Проблем Морских технологий ДВО РАН (ИПМТ ДВО РАН); Южный Федеральный Университет (ЮФУ); Институт Океанологии РАН им. П.П. Ширшова (ИО РАН); АО «Шельф»; Санкт-Петербургский Государственный Морской Технический Университет (СПбГМТУ) совместно с АО «НПП ПТ «Океанос». При этом на прошедших во Владивостоке Первых Всероссийских соревнованиях по морской робототехнике «» сборная команда СПбГМТУ и АО НПП ПТ "ОКЕАНОС"; () заняла первое место в номинации автономные необитаемые подводные аппараты тип «Глайдер».
«Успешно завершившиеся для нас соревнования еще раз показали, что несмотря на появившиеся в последнее время заявления целого ряда организаций о наличии успешных разработок в области подводных глайдеров, реально существующий и работающий отечественный глайдер пока есть только у нас», - Сергей Волошин, главный конструктор АО «НПП ПТ «Океанос». – «Успех проекта подтвердил правильность выбранного нами курса развития – разработки передовой морской робототехники. Будем двигаться вперед, планов и идей еще очень много».
Буквально несколько дней назад МИНЭНЕРГО подвел итоги «», и наградил совместную работу АО «НПП ПТ «ОКЕАНОС», ФГБОУ ВО СПбГМТУ и МГУ им. Ломоносова (НОЦ «Нефтегазовый центр МГУ») на тему «Концепция роботизированной подводной сейсморазведки в подледных
акваториях» званием лауреата первой премии.
Это еще раз доказывает актуальность выбранной темы и правильность магистрального направления по широкому использованию автономных робототехнических средств для масштабных обследований акваторий потенциальных месторождений в районах, слабодоступных для традиционных методов. ++









