
Робо-насекомое, напечатанное на 3D-принтере, скачет без питания и без проводов
11.06.2016Исследователи из Университета Мэриленда, США использовали 3D-печать для создания миниатюрных роботов с четырьмя конечностями, способных пробираться по пересеченной местности. Роботы длиной 20 мм и шириной 5.6 мм, напечатанные на 3D-принтере, весят менее 2 граммов и могут двигаться разными стилями: рысью, шагом, переваливаясь, перекатываясь, подскакивая и подпрыгивая. В очередной раз, разработчиков вдохновлял бионический подход - идеи таких конструкций можно почерпнуть у насекомых.
Робота создавали Ryan St. Pierre и профессор Sarah Bergbreiter в Университете Мэриленда. В мае разработчики представили характеристики робонасекомого на Международной конференции робототехники и автоматики (ICRA) в Стокгольме, Швеция.
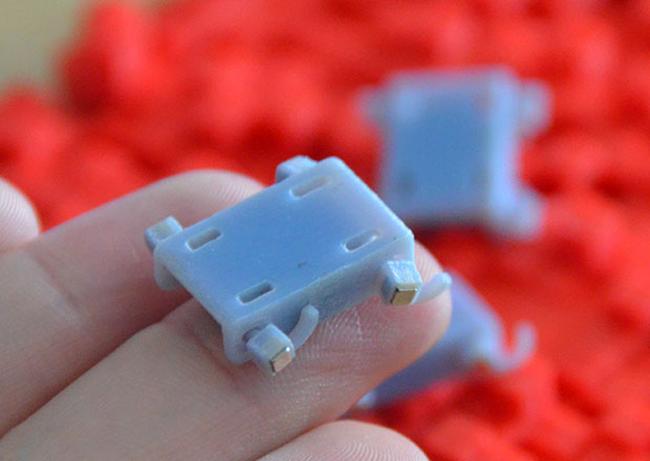
Особенность робота в том, что он напечатан на 3D-принтере, что называется "в один проход". После в робота устанавливается четыре магнита кубической формы - по одному для каждой ноги. Вращение большого магнита поблизости заставляет микророботов прийти в движение. Ориентация каждого магнита задает походку бота.

Ранее изобретатели уже пробовали создать робота с 6 ногами, действующего по тому же принципу - он был похож на Robotic Autonomous Crawling Hexapod (Roach), разработанный в UC Berkeley в 2009 году. В опытах Университета Мэриленда лапы гексаподов периодически блокировали одна другую. Пришлось отказаться от пары ног.
Исследователи изучили различные комбинации исходной установки магнитов, а также различные варианты скорости вращения актуатора. Оказалось, что наилучшие результаты получались, если актуатор работал с частотой 10 Гц - в этом случае робот двигался со средней скоростью 78 мм/с, т.е. примерно 4 длины тела в секунду. В зависимости от типа поверхности оптимальными оказались разные стили движения. Например, "антилопьи прыжки", когда робот взмывал в воздух, давали самое быстрое движение в случае нормальной и слегка неровной поверхности по которой двигался робот, тогда как другие стили давали лучшие результаты в случае сильно пересеченной поверхности.
Ученые намерены продолжать исследования. Несмотря на простоту конструкции, они могут экспериментировать с различными конструкциями "ног", походкой, формой тела и т.п. Удобно то, что с помощью 3D-принтера нетрудно создать целый рой таких роботов. А также то, что используя тот же принцип, можно создавать роботов даже меньшего размера.
Разработчики уже создают робота длиной всего 2.5 мм. Такие роботы смогут попасть туда, куда традиционные роботы забраться не смогут.
+ +









