
Конспекты: Agro Robotic Systems. Интеллектуальное земледелие
01.05.2017Лев Киселевский, генеральный директор Agro Robotic Systems, выступил с презентацией «Интеллектуальное Земледелие от Agro Robotic Systems» 27 февраля на встрече “Робототехника в сельском хозяйстве”. Вашему вниманию предлагается конспект выступления, подготовленный Алексеем Бойко, RoboTrends.ru. Заходите также в раздел "Роботизация сельского хозяйства"

ЛК: Сегодня уже отмечалось, что перерасход сырья, материалов и ресурсов, прежде всего перерасход посевных материалов - это одна из серьезных проблем сельского хозяйства на сегодня. Давайте поговорим о возможных путях решения этой проблемы.

Посев - это тот этап, который является начальным и самым главным в цикле производства зерновых (и не только) культур.

Предлагаемое нами решение состоит из двух шагов и, соответственно, из двух продуктов.
Первый продукт - это программа AGROS для расчета оптимальной траектории движения техники при посеве.
В настоящее время практика такова, что как правило, маршрут движения техники при посеве выбирает механизатор. В результате неизбежно возникают не оптимальные траектории, клинья и перерасход посевного материала, удобрений и горючего.
Второе - это решение AVIS, предназначенное непосредственно для управления движением сельхозтехники с целью отработки расчетной оптимальной траектории.
Расскажу об этом чуть подробнее.

AGROS - это программа, адресованная агроному. Это простой софт, который позволяет загрузить карту поля. Такие карты, как правило, уже имеются в хозяйствах. Это могут быть оцифрованные спутниковые фотографии с GPS-привязкой, или более точные карты с использованием наземных сигналов.
Мы берем готовую карту, задаем контуры поля, которое требуется обработать, загружаем параметры - ширину захвата, тип посевного материала, тип траектории - программа выдает нам вариант оптимального маршрута движения при обработке поля. Результат расчета можно выгрузить либо на принтер, получить его в печатном виде, чтобы передать механизатору, либо отправить в систему управления, если техника поддерживает такую функциональность.

AVIS. Это система управления - набор датчиков и системное оборудование, позволяющий автоматизировать уже имеющийся в хозяйстве трактор. Не нужно приобретать новый парк техники. Наши датчики могут быть установлены практически на любой имеющийся у вас трактор.
Основная задача - точно позиционироваться в процессе посева.

В нижнем левом углу картинки показана типовая ситуация, когда две зоны сева не полностью совпадают - они то частично перекрываются, то остаются участки, не обработанные в процессе сева, что приводит к перерасходу семенного материала.
Наша задача - внедрить такую систему управления и позиционирования, которая бы позволила автоматически сократить перекрытия между двумя проходами.
Какие конкретно технологии мы для этого применяем?
В отличие от типовых применяемых сейчас решений, основанных на GPS либо на RTK-поправках, наша система позволяет обеспечивать позиционирование с опорой на лазерные и оптические датчики. Позиционируется система с опорой на предыдущую борозду, которую оставил трактор при проходе по полю. Это наше собственное решение, обеспечивающее нам конкурентное преимущество. Оно точнее и обходится дешевле, нежели чем решения конкурентов.

Основные параметры, которыми характеризуются известные системы позиционирования - это точность, это стоимость эксплуатации и дополнительные условия применения. Точность, которую на сегодня обеспечивает использование RTK достигает 5 см, но за эту стоимость приходится сполна платить. Средняя стоимость подписки составляет порядка 2 тыс. евро на одну единицу техники, чтобы получать точное позиционирование на поле.
Наша система использует оптические датчики и не требует расходов на RTK. Установив ее один раз, вы сможете сэкономить на ежегодных расходах, которые хозяйству приходилось нести ранее.
Вопрос из зала: как оказывается корректирующее воздействие на подруливающий механизм?
Л.К.: Есть два решения. Одно - для подготовленных тракторов, способными работать с программами автовождения, как правило, это импортная техника. Второе - для неподготовленных тракторов типа МТЗ, К700-х. На такие трактора можно установить можно установить дополнительное подруливающее устройство, которое будет производить необходимое корректирующее воздействие на трактор. Это готовые, доступные решения.
Основное, на что хотелось бы обратить ваше внимание - это экономия. Что происходит в реальных условиях хозяйства.
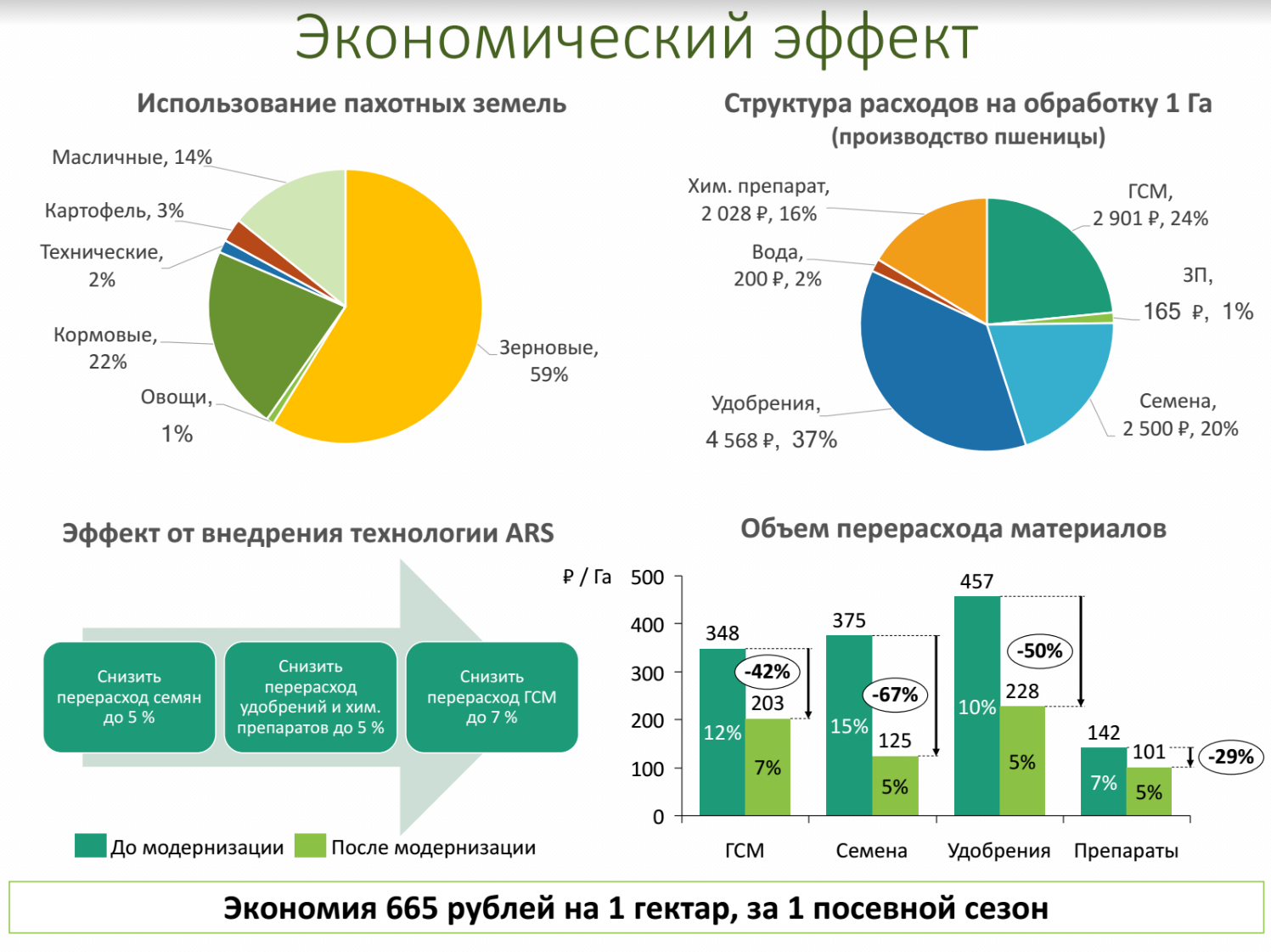
На круговой диаграмме в правом верхнем углу слайда показана примерная структура расходов хозяйства на обработку 1 Га при производстве пшеницы. Нетрудно заметить, что основные расходы связаны с удобрениями, хим. препаратом и ГСМ, а также непосредственно с семенами, тогда как размер заработной платы на фоне всего остального, крайне невелик. Поэтому устранение из уравнения затрат человека - вряд ли стоит считать приоритетной задачей хозяйства. Куда большей экономии можно достичь, если оптимизировать расходы на остальные четыре основных составляющих затрат.
По нашим собственным данным, собранным в ряде хозяйств, по упомянутым выше категориям перерасход составляет от 7 до 15% - посевному материалу, удобрениям и химическим препаратам. Все эти перерасходы связаны с неоптимальными действиями человека - механизатора. Здесь и неточности подруливания, и неудачное планирование траектории.
Если снизить расходы, связанные с перерасходом за счет более точного позиционирования и автоматического подруливания, хотя бы на 5%, можно достичь экономии вплоть до 655 рублей на 1 гектар за один посевной сезон.
Мы также просчитывали экономику для хозяйства, которое производит семена. У них структура расходов составляет более 40 тыс. руб. на гектар. Для них экономия в 5% будет еще выше, чем указанные выше 655 руб. на гектар за сезон.
Этой тематикой мы занимаемся около полугода (на февраль 2017 года), статус резидента “Сколково” мы получили в августе 2016 года. До этого занимались разработкой военных роботов. В марте 2017 года едем в Краснодарский край испытывать нашу систему курсоуказания, которая опирается на модуль сканирования борозд. К сентябрю 2017 года мы систему курсоуказания подключим к управлению трактором - это, собственно, и будет реализацией подруливания.
По нашему мнению, пока что не требуется полная автоматизация управления трактором с целью исключения людей-механизаторов. Наше решение на данный момент позволяет экономить вполне заметные средства за счет частичной автоматизации сельхозтехники.
+ +









