
ВМС США планируют оснастить эсминцы типа "Арли Бёрк" подводными беспилотными планерами
29.10.2016Подводный планер - это вид автономного необитаемого подводного аппарата (АНПА), использующего для своего движения в воде энергию волн. ВМС США возможно начнет использовать подводные планеры для поиска вражеских подводных лодок, оснастив парой планеров каждый из своих эскадренных миноносцев.
Принцип движения подводного планера придумал в 1989 году американский океанограф Генри Стоммел. Идею он позаимствовал у рыб и китообразных. Говоря научным языком, подводный планер движется за счет преобразования вертикального импульса всплытия или погружения в горизонтальный, что достигается, например, изменением относительного положения центра тяжести. Первые подводные планеры, основанные на этом принципе, появились в начале XXI века, их начали использовать в научных исследованиях океана и в военных целях.
Основное преимущество подводных планеров перед другими подводными роботами в том, что они требуют минимума энергии от бортового источника, поскольку не имеют собственного двигателя. Встроенный источник используется только для изменения центра тяжести (или плавучести, или давления) АНПА, остальное происходит за счет энергии волн. Благодаря этому, похожий на торпеду аппарат с парой небольших крыльев и вертикальным стабилизирующим плавником может работать под водой неделями и даже месяцами, проплывая сотни или тысячи километров.
Стоит опустить планер в морскую воду, и приняв воду в носовой отсек, он начнет плавное движение вперед и вниз. Также используется изящное инженерное решение - тяжелый блок электрических батарей, который питает электрику и электронику глайдера, может скользить вперед и назад внутри планера, чтобы еще более изменить центр тяжести. Перемещение центра тяжести позволяет изменять угол наклона аппарата в вертикальной плоскости. После того, как аппарат погрузится на несколько сотен метров, дрон откачивает воду из носового отсека, что изменяет угол наклона планера, заставляя его начать плавный подъем к поверхости. После всплытия аппарат может обменяться данными с центром управления, передать собранные данные и получить новые задачи.
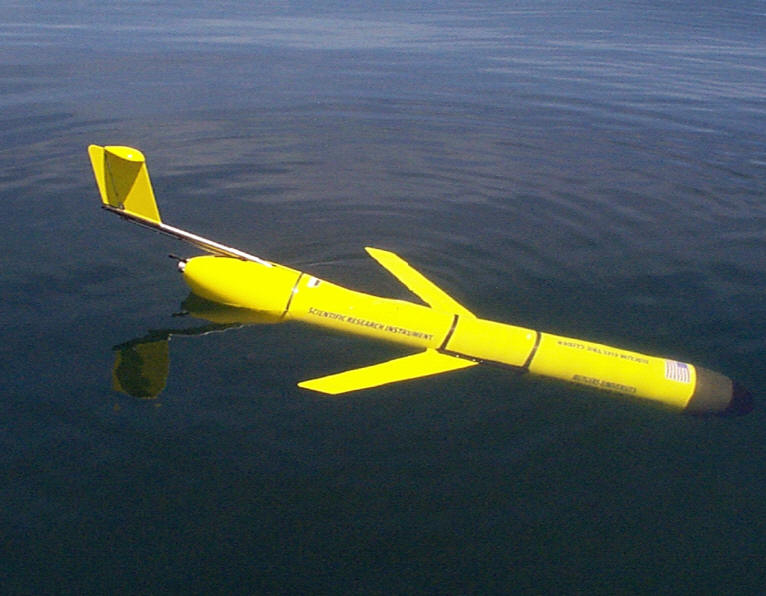
Подводных планеров построено уже немало, наиболее известными из них являются аппараты Slocum компании Teledyne Webb Research, например, Slocum G2.
Подводные планеры, если говорить о возможностях их военного использования, хороши для обнаружения вражеских подлодок. Поскольку у глайдера нет двигателя, обнаружить его под водой практически невозможно. Глайдер может быть оснащен пассивным сонаром, который способен детектировать подводные лодки противника. Выявив подлодку, планер начинает движение к поверхности и передает ее координаты, направление движения и скорость, а также, возможно, и тип подлодки, если его удалось определить.
АНПА Rusalka, Webb Slocum Glider, США (Используется Вудсхольским Океанографическим институтом).
ВМС США планирует запускать подводные планеры не только с эсминцев, но и с подлодок.
Один из способов применения, подразумевает формирование из большого набора планеров сети акустического обнаружения. Если глайдеров будет достаточно много, то собранные ими акустические данные можно интегрировать в единую звуковую картину с помощью специального программного обеспечения, на основе анализа которой также можно выявлять движущиеся под водой объекты. В годы Холодной войны XX-века, США уже создавала постоянно действующую сеть подводных гидрофонов, SOSUS, в Атлантическом океане, чтобы выявлять перемещения советских подлодок. В XXI веке аналогичным целям может служить подвижная сеть из подводных глайдеров. В отличие от стационарных сонаров, планеры намного сложнее выявить, к тому же их намного проще переместить в любую заданную область, а также запустить новые взамен вышедших из строя.
+ +








