
АНПА - платформы для сбора данных следующего поколения
27.07.2018Автономные необитаемые подводные аппараты (АНПА) - это не новая технология. Такие роботы используются еще с пятидесятых годов прошлого года. В последние 40 лет они применяются в основном газо- и нефтедобытчиками, если не считать военных. И только несколько лет тому назад началось все более активное их использование в качестве платформ, способных собирать самые разные данные.
Аналитики Westwood прогнозируют агрессивный рост спроса на АНПА вплоть до 2022 года, в значительной мере из-за того, что промышленность начинает все активнее внедрять АНПА в практику полевых инспекций.
Поскольку развитие добывающей промышленности постепенно смещается в сторону глубоководной среды, ТНПА, пригодные для соответствующих исследований, становятся все более сложными и дорогостоящими. Это позволяет переходить к использованию вместо них АНПА, в надежде на снижение расходов на исследования.
“Как сервис-провайдеру, нам интересно, что существует множество различных технологий и платформ, которые можно использовать в нефте- и газодобыче, будь то сбор геофизических и геохимических данных, бурение с использованием замеров и систем направленного бурения. Наличие аппаратов, которые способны проводить разнообразные подводные исследования - очень удобно”, - заявляет управляющий директор Schlumberger Robotics Services.
Производители ожидали роста спроса на АНПА со стороны операторов ветроэлектростанций, размещаемых в море, но до сих пор этого не произошло. Дело в том, что большинство шельфовых ветряков устанавливаются близко к берегу, что позволяет использовать для их инспекции различные надводные средства или ТНПА.
Другие возможные применения для АНПА и автономных наземных судов - это автономные системы доставки грузов.
Одно из потенциально ключевых направлений - это IMR (исследование, обслуживание и ремонт). И здесь все зависит от эффективности внедрения. Стоимость перехода на новую технологию критична, поэтому операторы должны быть уверены, что они смогут эксплуатировать АНПА эффективно при минимальном задействовании людей. Еще один дифференциатор - это способность АНПА после всплытия подключаться к сотовой связи (где это возможно) или к спутниковой связи.
В февральском отчете BCC Research перечислены некоторые из проблем, с которыми сталкиваются разработчики АНПА. В частности, это контринтуитивный гидродинамический отклик роботов, плохие возможности визуализации собираемой информации, сложности представления данных с сонаров в удобной для восприятия форме, частая невозможность установки связи, недостаточная силовая надежность в подводной среде - все это выступает существенными ограничителями при разработке конструкций АНПА. Для решения этих задач, в частности, требуется внедрять различные технологии ИИ.
Решить проблему связи с АНПА позволяет использование так называемых “местных” или резидентных АНПА (resident AUV). На рисунке ниже показано, что отличает применение традиционного ТНПА и местного АНПА.
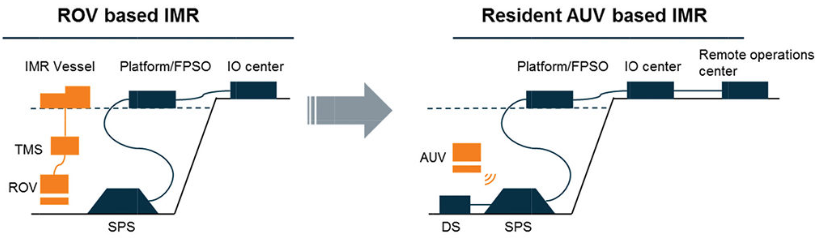
Источник: Furoholmen и др. (2013), .
ТНПА получает питание по кабелю и управляется также по кабелю со специального судна IMR с использованием системы управления тросом.
Резидентный АНПА - это работающий от встроенной батареи аппарат с нулевой плавучестью, который работает под водой либо в автономном режиме, либо беспроводно управляется с использованием транспондеров, устанавливаемых, как правило, на подводных элементах производственной системы. Малое время реакции АНПА на команды оператора помогают снижать риски использования подводных роботов, а также отказаться или снизить потребности в использовании ТНПА. А главное - пропадает необходимость в использовании вспомогательного судна, с которого запускают ТНПА, и устройства подбора троса.
Резидентный АНПА может подолгу оставаться под водой, что позволяет задействовать его для осмотров и ремонта практически в любой желаемый момент времени с минимумом затрат. Управлять таким устройством можно как с платформы, так и из специального центра управления, который может обеспечивать управление несколькими АНПА на различных сайтах.
Хотя ТНПА пока что остаются незаменимыми там, где требуется решать задачи, требующие больших энергозатрат, например, при подводном монтаже и ремонте, резидентные АНПА могут решать множество задач, которые сейчас выполняют традиционные системы АНПА, например, инспекцию трубопроводов и картографирование дна.
Equinor и Konigsberg разрабатывают АНПА третьего поколения
Разработка и совершенствование резидентных АНПА идет вот уже около 5 лет. Согласно прогнозам BCC, резидентные системы АНПА будут все более активно применяться для инспекции подводного производственного оборудования.
Одна из таких систем, близкая к коммерческой готовности - это Eelume, модульный гибкий подводный робот, способный плыть как змея или приводиться в движение обычными трастерами. Проект начался в 2015 года как спин-офф Норвежского Университета Науки и Технологий.

Рисунок: Eelume AS, .
Eelume - это модульная комбинация соединителей, трастеров и модулей с различной полезной нагрузкой. Соединители позволяют АНПА изгибаться, а так называемые латеральные трастеры, встроенные в модули, позволяют формировать тягу в произвольных направлениях, задавая различные комбинации формы тела робота.
Разработчики из Eelume AS в 2016 году заключили соглашение с нефтедобытчиками из Statoil (ныне Equinor) и Kongsberg о разработке и производстве роботов Eelume. С тех пор сменилось уже три версии дизайна робота и сейчас готовится его коммерческое производство.
В Kongsberg провели несколько морских испытаний прототипа в 2016 году.
Аппарат второго поколения показали в 2017 году, он мог погружаться на глубину до 500 метров и позволил проверить концепт самодвижущейся роботизированной руки, которая способна решать задачи обследования и ремонта. В частности, была проверена возможность использования инструментов, требующих для использования моментов вращения. Для этого используются два манипулятора, которыми может снабжаться робот - одним он фиксирует робота на месте работ, а другим работает с инструментом.
Eelume третьего поколения, который, как ожидается, будет готов к коммерческой эксплуатации, начиная с 2018 года, сможет работать без внешнего питания и управления. Для этого робот получит встроенные батареи и бортовые процессоры, которые позволят устройству автономно ходить под водой, не сталкиваясь с препятствиями.
Когда этот АНПА окажется в зоне работ, устройство установит беспроводный широкополосный двунаправленный канал связи с пунктом управления, что позволит оператору использовать робота в режиме ТНПА.
В перспективе разработчики хотели бы довести свою разработку до того, чтобы она оставалась в погруженном состоянии и в постоянной готовности к действиям вплоть до полугода подряд. Вероятно это потребует доработать конструкцию робота с тем, чтобы он мог самостоятельно менять составляющие его модули и рабочие инструменты, выбирая нужные для очередной операции в подводном хранилище.
Исследуя новые границы
Разработчики АНПА присматриваются к возможностям адаптации своих изделий к сложным климатическим условиям Арктики, где море покрыто льдом вплоть до девяти месяцев в году. Хотя коммерческий интерес к освоению Арктики с 2013 года снизился, компании все же интересуются подводными роботами, которые могли бы работать в условиях этого региона.
В июне 2018 года с показала модель автономного надводного судна для эксплуатации в условиях Арктики. В частности, этот робот мог выявлять ледовые препятствия с использованием размещенных на нем сенсоров, самостоятельно маневрировать без вмешательства оператора, двигаясь к заданной точке. Автономная система навигации позволяла прокладывать маршрут, позволяющий избежать препятствий, выявленных сенсорами. В движение робота приводили встроенные водометы с питанием от бортовых аккумуляторов, данные передавались на наземный пункт управления.
Такие роботы можно использовать и в исследовании ледников - обитаемому судну подходить близко к леднику опасно, поскольку в любой момент от него может оторваться гигантский фрагмент. Другое дело - послать к леднику робота - он соберет необходимые данные, а в случае, если на него свалится ледяная глыба... что же, исследования вблизи полюсов нашей планеты все еще остаются дорогим удовольствием.
Справедливости ради отметим, что показы надводного робота проводились на воде, свободной от льда, так что говорить о его полной готовности пока что вряд ли возможно.
Еще одно потенциальное направление для применения АНПА - это поиск на морском дне так называемых просачиваний. В частности, первые применения АНПА для поиска просачиваний углеводородов описаны еще в 2007 году. По мере роста возможностей АНПА, этот способ поиска новых месторождений может оказаться более востребованным и экономически выгодным, чем направленное бурение.
Вряд ли можно спорить с идеей, что чем более совершенными будут АНПА, тем больше найдется для них разнообразных применений на морском дне.
, также по теме - Каталог подводных роботов. ++








