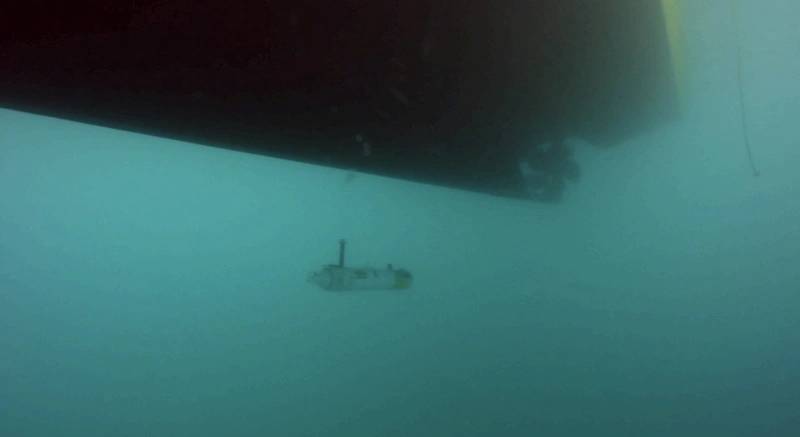
АНПА компании IQUA Robotics способен автономно осматривать подводную часть корпуса судна
29.04.2026Речь идет о проекте Escabvents испанской компании IQUA Robotics, который она осуществила совместно с верфью Zamakona Yards. Целью проекта было провести испытания, которые бы подтвердили жизнеспособность использования АНПА для задач военно-морской инспекции.
Проект финансировала ЕС. Исследование было сосредоточено на преодолении ограничений существующих методов, основанных на использовании водолазов или ROV. Использование АНПА позволяет проводить систематический контроль подводной части судов практически без участия операторов в процессе.
В ходе проекта было подтверждено несколько ключевых возможностей:
- Адаптивное слежение. Аппарат использует многолучевый гидролокатор для выявления деталей (в тексте - профиля) корпуса судна в режиме реального времени, корректируя свою позицию для поддержания постоянной дистанции от корпуса.
- Систематическая навигация. Система автономно отрабатывает адаптивные траектории типа «газонокосилка», обеспечивается полное и равномерное покрытие подлежащих проверки областей
- Безопасность эксплуатации. Внедрен ряд протоколов, что позволяет аппарату выполнять автоматические маневры выхода в свободные зоны в случае отказа, гарантирующие, что аппарат не застрянет под корпусом. (Смелое заявление - это может быть работает в условиях Атлантики на широтах Испании, но будет ли это гарантированным, например, в условиях Арктики, где под судном может оказываться лед? Впрочем, уже хорошо, что на эту тему думали и пробовали предусмотреть.)
Промежуточный итог
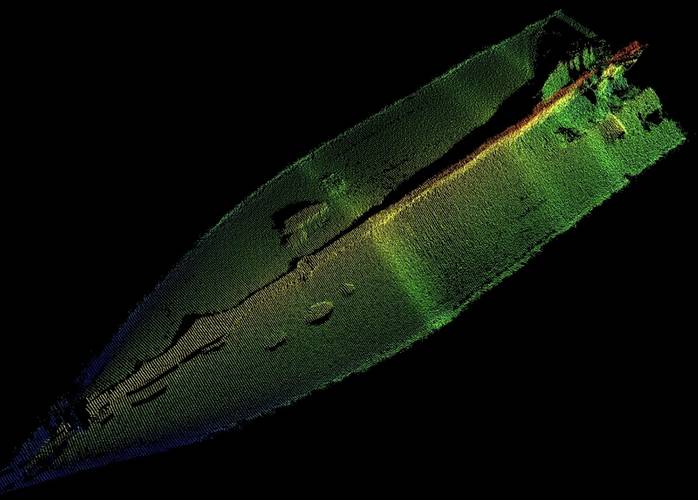
Проведенные эксперименты позволили собрать множество наборов данных по четырем судам различных типов - рыболовному, научно-исследовательскому и военным. Результаты показали, что можно формировать цифровые 3D-реконструкции с разрешением до сантиметров, что, кроме выявления посторонних объектов, также облегчает идентификацию коррозии, биообрастаний или повреждений лакокрасочного покрытия.
Следующие шаги
Хотя система себя хорошо показала на однородных участках корпуса (этого можно было ожидать), были выявлены проблемы в областях со сложной геометрией, прежде всего, на корме в районе винторулевой группы (тем более ожидаемо). Акустические отражения затрудняют здесь автоматическое отслеживание.
Кроме того, были обнаружены сложности получения изображений бортов судна, поскольку высокий контраст света на поверхности приводит к недоэкспозиции в этих областях.
Соответственно планируется разработать новые полезные нагрузки с многокамерными системами и искусственным освещением, призванные улучшить возможности сбора информации в оптическом диапазоне.
Будет также дорабатываться система построения 3D-изображений, чтобы повысить качество работы с судами различного профиля и улучшить управление аппаратом в корреляции с профилем обследуемого судна.
Как ожидается, эта технология найдет применение и для повышения безопасности портов за счет автоматизированного контроля критически важной инфраструктуры, обнаружения находящейся под водой контрабанды или других угроз. \\
@SeaRobotics по материалам Marine Technology News, фотографии - IQUA Robotics