
- 09.06.2026 Locus Robotics приобрела канадского производителя складских захватов Nexera Robotics Robo-Новости
 Американский поставщик гибких систем для складской автоматизации Locus Robotics приобрел канадского производителя роботизированных захватов Nexera Robotics. Платформа LocusONE оркестрирует рабочие процессы комплектования заказов, включая отбор, пополнение запасов, сортировку и упаковку, а системы NeuraGrasp подстраиваются под форму, текстуру поверхности, материал, пористость и вес миллионов различных продуктов, обеспечивая надежный захват в реальных складских операциях.Читать далееКомментарии
Американский поставщик гибких систем для складской автоматизации Locus Robotics приобрел канадского производителя роботизированных захватов Nexera Robotics. Платформа LocusONE оркестрирует рабочие процессы комплектования заказов, включая отбор, пополнение запасов, сортировку и упаковку, а системы NeuraGrasp подстраиваются под форму, текстуру поверхности, материал, пористость и вес миллионов различных продуктов, обеспечивая надежный захват в реальных складских операциях.Читать далееКомментарии - 28.10.2022 В Южной Корее придумали универсальный захват, комбинирующий "когти" и всасывание Robo-Новости
 Имитировать особенности хобота решили с помощью комбинации захвата когтевого типа и захвата всасывающего типа.Читать далееКомментарии
Имитировать особенности хобота решили с помощью комбинации захвата когтевого типа и захвата всасывающего типа.Читать далееКомментарии - 02.02.2022 OnRobot 2FGP20 - электрическое захватное устройство Robo-Шум
 Новинка от OnRobot - универсальное электрическое захватное устройство OnRobot 2FGP20. Предназначено для роботов, занятых на паллетировании и укладке прокладочных листов.Читать далееКомментарии
Новинка от OnRobot - универсальное электрическое захватное устройство OnRobot 2FGP20. Предназначено для роботов, занятых на паллетировании и укладке прокладочных листов.Читать далееКомментарии - 02.02.2022 В США представили самый деликатный захват для робоманипулятора Robo-Новости
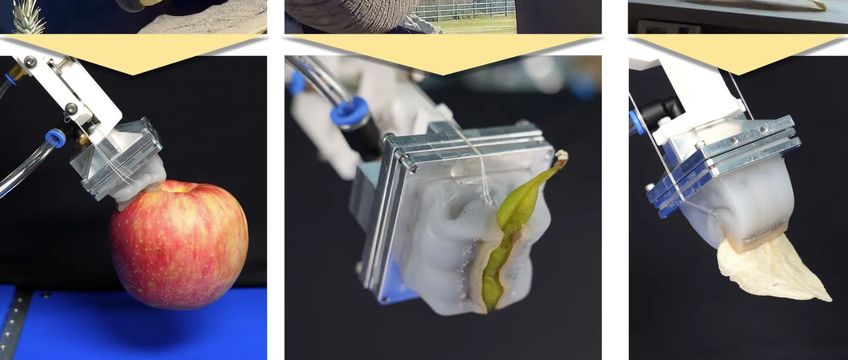
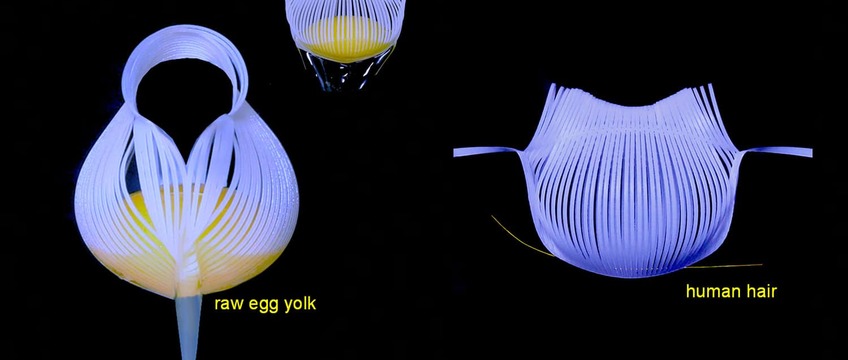 Группа разработчиков из Университета штата Северная Каролина представили концепт, вероятно, наиболее деликатного захвата для робоманипулятора. Устройство вдохновлено японским искусством изготовления фигурок и открыток из бумаги при помощи ножниц - киригами. При растяжении “листа” манипулятора захват формирует трехмерную сферу вокруг объекта, обеспечивая высокую точность и бережное обращение - оказываемое на объект давление остается минимальным. Девайс позволяет захватывать желтки и человеческие волосы.Читать далееКомментарии
Группа разработчиков из Университета штата Северная Каролина представили концепт, вероятно, наиболее деликатного захвата для робоманипулятора. Устройство вдохновлено японским искусством изготовления фигурок и открыток из бумаги при помощи ножниц - киригами. При растяжении “листа” манипулятора захват формирует трехмерную сферу вокруг объекта, обеспечивая высокую точность и бережное обращение - оказываемое на объект давление остается минимальным. Девайс позволяет захватывать желтки и человеческие волосы.Читать далееКомментарии - 14.07.2020 В MIT кобота учат работать с гибкими кабелями Robo-Новости
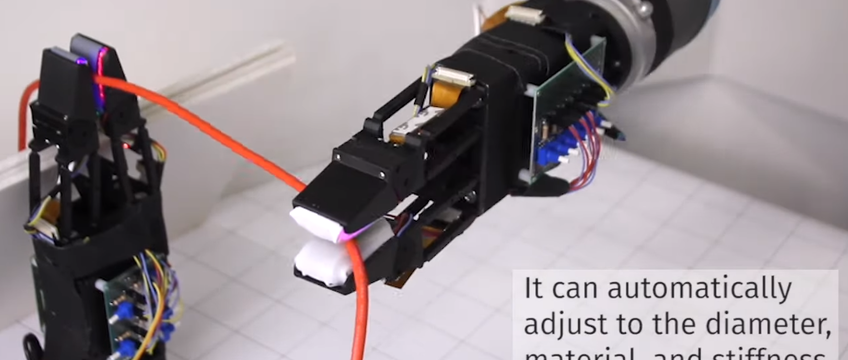 И это получается. Робот еще не освоил искусство распутывания или вязку сложных узлов, но уже справляется с поиском конца гибкого кабеля и вставлением штеккера в гнездо разъема. Разработчики на этом останавливаться не собираются.Читать далееКомментарии
И это получается. Робот еще не освоил искусство распутывания или вязку сложных узлов, но уже справляется с поиском конца гибкого кабеля и вставлением штеккера в гнездо разъема. Разработчики на этом останавливаться не собираются.Читать далееКомментарии - 18.03.2019 Сильный и деликатный: MIT представили мягкий робоманипулятор Robo-Новости
 В MIT представили мягкий робоманипулятор, способный поднимать объекты в 100 раз тяжелее себя самого.Читать далееКомментарии
В MIT представили мягкий робоманипулятор, способный поднимать объекты в 100 раз тяжелее себя самого.Читать далееКомментарии - 11.02.2019Гриппер на базе сил Ван-дер-Ваальса разработали в OnRobot Robo-Новости
 Небольшая датская компания OnRobot известна своими разработками грипперов - различных захватов для использования вместе с промышленными манипуляторами. Новинка, которую недавно представила компания, это захват, действие которого основано на силах Ван-дер-Ваальса.Читать далееКомментарии
Небольшая датская компания OnRobot известна своими разработками грипперов - различных захватов для использования вместе с промышленными манипуляторами. Новинка, которую недавно представила компания, это захват, действие которого основано на силах Ван-дер-Ваальса.Читать далееКомментарии - 07.03.2018 В Гарварде объединили осязание и софтроботику Robo-Новости
 Обе этих технологии не являются принципиально новыми и применяются в различных робототехнических изделиях. Но, как правило, не вместе. Дело в том, что традиционные датчики давления, температуры, прикосновения и движения мало пригодны для использования на мягком роботизированном манипуляторе. Разработчики и Гарвардского Университета смогли создать манипулятор, который объединяет преимущества технологии осязания и софроботики.Читать далееКомментарии1
Обе этих технологии не являются принципиально новыми и применяются в различных робототехнических изделиях. Но, как правило, не вместе. Дело в том, что традиционные датчики давления, температуры, прикосновения и движения мало пригодны для использования на мягком роботизированном манипуляторе. Разработчики и Гарвардского Университета смогли создать манипулятор, который объединяет преимущества технологии осязания и софроботики.Читать далееКомментарии1 - 11.07.2017 Yaskawa представит захват AirGrip для работы со стеклянными и пластиковыми бутылками Robo-Новости
 На выставке DrinkTec Yaskawa покажет решение захвата AirGrip, предназначенная для роботизированной работы с бутылированными прохладительными напитками. Захват предназначен для использования с промышленным манипулятором Motoman. Патентованное устройство обеспечивает возможность быстрого и надежного захвата для загрузки / извлечения стеклянных и пластиковых бутылок в ящики и коробки.Читать далееКомментарии
На выставке DrinkTec Yaskawa покажет решение захвата AirGrip, предназначенная для роботизированной работы с бутылированными прохладительными напитками. Захват предназначен для использования с промышленным манипулятором Motoman. Патентованное устройство обеспечивает возможность быстрого и надежного захвата для загрузки / извлечения стеклянных и пластиковых бутылок в ящики и коробки.Читать далееКомментарии - 03.06.2017 Коллаборативному роботу нужен коллаборативный захват Robo-Новости
 Коллаборативные роботы появились всего несколько лет тому назад, но быстро доказали свою востребованность. Приходящаяся на них доля рынка постоянно растет. Аналитики рынка прогнозируют дальнейший рост и я с ними совершенно согласен. В ближайшие годы многим людям придется работать в непосредственной близости, в контакте или тандеме с роботами. И если на первых порах всем хватало базовой коллаборативности, когда робот останавливается при контакте его рабочих поверхностей с человеком, то сейчас в трендах коллаборативные захваты, которые безопасны, замечают контакт с человеком и не выходят за границы рабочего пространства.Читать далееКомментарии
Коллаборативные роботы появились всего несколько лет тому назад, но быстро доказали свою востребованность. Приходящаяся на них доля рынка постоянно растет. Аналитики рынка прогнозируют дальнейший рост и я с ними совершенно согласен. В ближайшие годы многим людям придется работать в непосредственной близости, в контакте или тандеме с роботами. И если на первых порах всем хватало базовой коллаборативности, когда робот останавливается при контакте его рабочих поверхностей с человеком, то сейчас в трендах коллаборативные захваты, которые безопасны, замечают контакт с человеком и не выходят за границы рабочего пространства.Читать далееКомментарии - 01.10.2015 Роботы становятся безопаснее благодаря софт-роботике Robo-Новости
 В лаборатории Computer Science and Artificial Intelligence Lab, Массачусетского технологического университета создали манипулятор для робота, позволяющий захватывать и перемещать хрупкие объекты, не повреждая их. Детали захвата, который поставили на промышленного робота Baxter, Rethink Robotics, напечатаны на 3D-принтере из силикона. В захват вмонтированы сенсоры, которые помогают роботу идентифицировать захватываемый объект. Благодаря этому робот может брать предметы, такие как яйцо, бумажный стаканчик или очки, не сломав и не разбив их. Захват снабжен пневматическими поршнями, которые управляют воздушными камерами в пальцах, позволяя им расширяться и сжиматься, что и определяет, с каким усилием робот будет брать и удерживать тот или иной предмет.Читать далееКомментарии
В лаборатории Computer Science and Artificial Intelligence Lab, Массачусетского технологического университета создали манипулятор для робота, позволяющий захватывать и перемещать хрупкие объекты, не повреждая их. Детали захвата, который поставили на промышленного робота Baxter, Rethink Robotics, напечатаны на 3D-принтере из силикона. В захват вмонтированы сенсоры, которые помогают роботу идентифицировать захватываемый объект. Благодаря этому робот может брать предметы, такие как яйцо, бумажный стаканчик или очки, не сломав и не разбив их. Захват снабжен пневматическими поршнями, которые управляют воздушными камерами в пальцах, позволяя им расширяться и сжиматься, что и определяет, с каким усилием робот будет брать и удерживать тот или иной предмет.Читать далееКомментарии
Публикации Метки: захваты (11)









