
Подводные роботы Аквароботех-2018
30.08.2018Во Владивостоке завершились соревнования подводной робототехники "Аквароботех 2018". Встреча "Аквароботех" получилась масштабной, в соревнованиях приняло участие 22 команды.На этой странице для вас собраны фотографии известных мне аппаратов из числа принявших участие в соревнованиях.
Силовики были представлены 11 командами: Минобороны, МЧС, Росгвардии, Морспасслужбы Росморречфлота, ФСБ России, Северного, Балтийского, Черноморского, Тихоокеанского флотов и Каспийской флотилии. Другие категории участников - это научные центры и предприятия-разработчики подводной работотехники, а также ВУЗы.
Состязания проходили по трем основным направлениям: телеуправляемые необитаемые подводные аппараты (ТНПА), автономные необитаемые подводные аппараты (АНПА), а также безэкипажные катера.
ТНПА
Самой представительной категорией подводных аппаратов предсказуемо оказались ТНПА - телеуправляемые необитаемые подводные аппараты. Командам с ТНПА предстояло обнаружить на морском дне стол с полыми кубиками размером 10х10 см и переместить их в корзину. Также необходимо было найти четыре миноподобных объекта.
Победителями среди силовых структур по ТНПА в классе "А" стали команды Минобороны РФ - 1 место, Тихоокеанского флота (ОКВС) - 2 место, и Федеральной службы войск национальной гвардии РФ (Росгвардии) - 3 место. По ТНПА класса "Б": команда Минобороны РФ - 1 место; команда Черноморского флота - 2 место; команда Каспийской флотилии - 3 место.
ТНПА Concept
C этим аппаратом на состязание прибыла команда Акустического института им. академика Н.Н.Андреева, Москва. Команда заняла второе место среди разработчиков и производителей ТНПА класса "Б".
Единственный известный мне Concept - это Concept-M, российский аналог АНПА Gavia. Удачно выступивший на соревнованиях во Владивостоке Concept, скорее всего, не имеет к нему никакого отношения. Фотографий этого аппарата я не нашел.
ТНПА Малахит
ТНПА "Малахит", Фото ФПИ
Легкий ТНПА "Малахит" представляла команда Института проблем управления им. В.А.Трапезникова, Москва. Вес аппарата - всего 7 кг. Удобно для переноски, но такие легкие аппараты обычно с трудом справляются с задачами, если попадают в подводные течения. Тем не менее, команда института заняла первое место среди разработчиков и производителей ТНПА класса "А". Некоторым недостатком оказалась ограниченная длина кабеля - из-за этого задания пришлось выполнять с лодки.
ТНПА Супер Гном Про
Команда компании «Акваспецсервис» (Астрахань) выступала с ТНПА «Супер ГНОМ Про», этой известной разработкой компании "Подводная робототехника".
В модельном ряду "гномов" запутаться нетрудно, предположительно на фото "Супер ГНОМ Про"

ТНПА «Супер ГНОМ Про» ?

Справа - тот же аппарат.
ТНПА Марлин-350

ТНПА «Марлин-350»
Это, наверное, самый популярный аппарат "Аквароботикс-350". С ТНПА «Марлин-350» заняла первое место среди разработчиков и производителей ТНПА класса Б команда компании «Тетис Про», Москва. Также с этим ТНПА выступали команды силовиков Минобороны, Черноморского флота (2-е местов категории ТНПА класса Б, силовики) и Каспийской флотилии (3-е место в категории ТНПА класса Б, силовики).
ТНПА Моби Дик 100

ТНПА "Моби Дик"
Свой ТНПА «Моби Дик 100» показала команда компании «Лаборатория подводной техники «WHALE» (Волгоград).
ТНПА Кусто II
ТНПА с таким названием привезла во Владивосток команда Московского государственного технический университет имени Н.Э. Баумана, Москва.
Не знаю, как сейчас выглядит Кусто II, а рендер первого Кусто еще совсем недавно выглядел так

Кусто, УНМЦ Гидронавтика, МГТУ им.Баумана
ТНПА Фалкон

"Фалкон" - это локализация для нужд российских военных аппарата SAAB Seaeye Falcon.
С аппаратом "Фалкон" намеревалась принять участие в соревнованиях команда МЧС России. К сожалению, аппарат выбыл из соревнований, поскольку еще во время тестов был поврежден его кабель-трос. Попытка задействовать другой аппарат также сорвалась, так как ТНПА требовал дополнительных настроек, которые не удалось сделать оперативно.
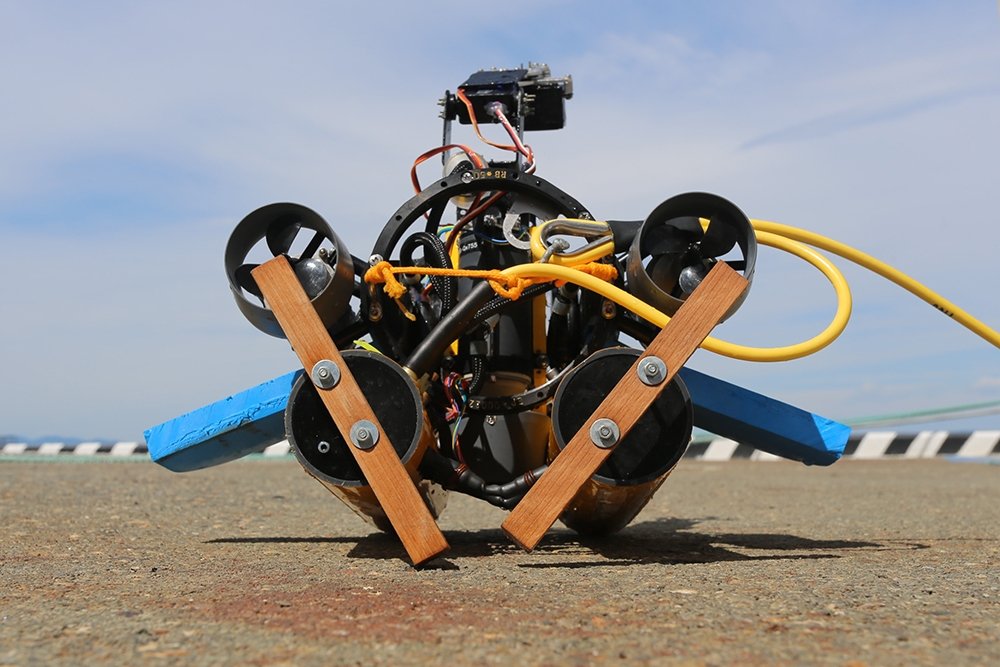
ТНПА Галтель

ТНПА "Галтель" (но это не точно).
Кроме этих многим известных аппаратов были и менее известные разработки ВУЗов.
ТНПА Белый Карлик
ТНПА с таким названием привезла команда Балтийского государственного технического университета "ВОЕНМЕХ" имени Д.Ф. Устинова», Санкт-Петербург. Фото нет.
ТНПА Вариола
Команда Санкт-Петербургского государственного морского технического университета выступала с ТНПА «Вариола» собственной разработки. Фотографии нет.
ТНПА Гидродинамика 2.0
ТНПА команды клуба юных техников Сибирского отделения РАН. Фото нет.
ТНПА Halkyon
С этим аппаратом выступала команда научно-инновационного комплекса «Морской технопарк» при Морском государственном университете имени адмирала Г.И. Невельского, Владивосток. Фото нет. Не уверен, что это российский аппарат.
Были и ТНПА, которые или не имеют названия, или оно не упоминается в доступных мне источниках информации:
Команда инженерной школы Дальневосточного федерального университета, Владивосток, с малогабаритным ТНПА собственной разработки, фото нет.
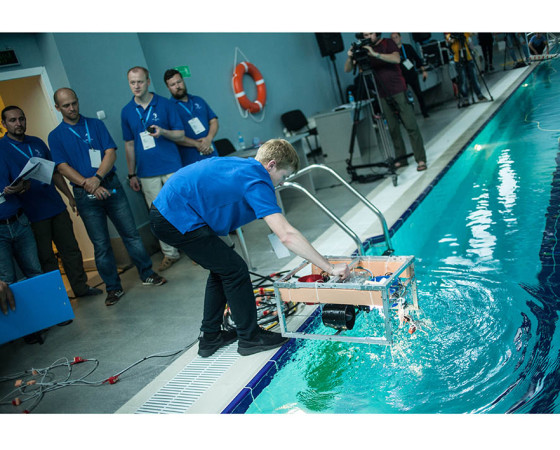
Фото: Севмашвтуз; источник фото:
ТНПА собственной разработки, Команда Северного (Арктического) федерального университета имени М. В. Ломоносова (Северодвинский филиал). Аппарат создали студенты Севмашвтуза специально для участия в Аквароботехе 2018, он оснащен манипулятором. Передача видеоизображения на 30 метров была обеспечена за счет использования активных USB-кабелей. Разработчики: Сергей Хозяинов, Константин Машихин, Владислав Микшин, Дмитрий Рыжов, Николай Кузнецов. Команда заняла пятое место. Аппарат будет модернизироваться с тем, чтобы можно было принимать участие в других соревнованиях. В частности, предстоит переработать управление с тем, чтобы управлять ТНПА не с клавиатуры ноутбука, а джойстиком. Сменится и принцип передачи видеоизобрежния.
АНПА
Второй категорией по числу представленных моделей на Аквароботикс-2018 стали автономные подводные необитаемые аппараты (АНПА).
АНПА Галтель

АНПА "Галтель"
Подводного робота АНПА "Галтель", предназначенного для работы в составе роботизированного комплекса охраны водного района, задействовала для участия в соревнованиях команда Тихоокеанского флота и Института проблем морских технологий РАН. И заняли с ним первое место в соревнованиях для разработчиков. Правда, со второй попытки, при первом погружении выявились проблемы с балансировкой.
АНПА-глайдер "Морская тень"
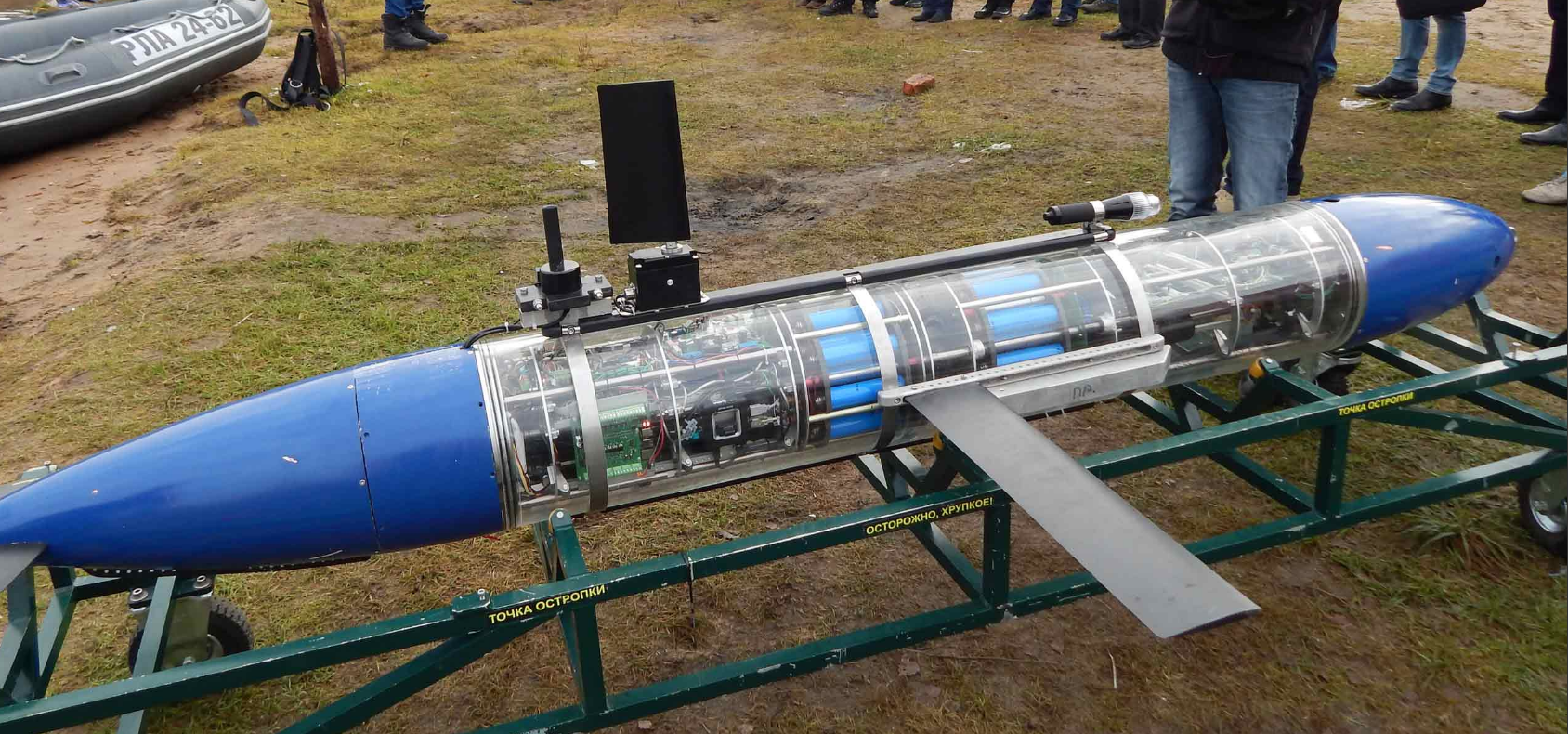
Глайдер "Морская тень"

Глайдер "Морская тень"
Особняком выступала команда Санкт-Петербургского государственного морского технического университета и АО «Научно-Производственное предприятие подводных технологий "ОКЕАНОС" (г.Санкт-Петербург) с глайдером "Морская тень". Команда заняла первое место по классу "глайдер", впрочем, других участников с аппаратами этого класса на соревнованиях не было. Напомню, что глайдеры - это АНПА в которых нет внешнего движетеля. Они перемещаются под водой на большие расстояния за счет изменения плавучести.
АНПА Платформа
АНПА "Платформа" привезла команда Национального исследовательского Томского политехнического университета. К сожалению, я не нашел фотографий этого АНПА, либо спутал их с фотографиями АНПА "Галтель". Между тем, команда заняла второе место в классе АНПА команд разработчиков.
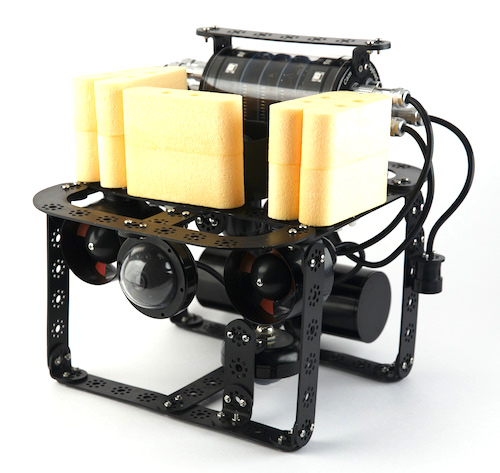
MUR или Micro Underwater Robot - это конструктор для сборки АНПА. Собранного на базе MUR подводного автономного робота привезла команда Севастопольского государственного университета.
Категория безэкипажных роботизированных катеров на соревнованиях во Владивостоке, на мой взгляд, была представлена слабо. Не было ни Искателя, ни других катеров, разрабатываемых в попытке создать отечественную версию французского Mk2.
Программа соревнований робокатеров выглядела примерно так: следовало выполнить в автономном режиме движение по заданной траектории, движение с маневром по скорости и выход на буй-мишень. Район выполнения упражнений находился более, чем в километре от берега. После отработки программы катера должны были самостоятельно вернуться на базу и выполнить автоматическую швартовку к пирсу.
Роботизированный безэкипажный катамаран Иркутского НИТУ

Многоцелевой роботизированный катамаран
Команда "Иркутского национального исследовательского технического университета" представила многоцелевой роботизированный катамаран, получающий питание от солнечных батарей. Команда заняла первое место в соревнованиях робокатеров.
Роботизированный безэкипажный мини-катер "Сигул"

Мини-катер "Сигул"
Команда НИИ РиПу "Южного федерального университета" (НИИ робототехники и процессов управления ЮФУ), Таганрог, привезла мини-катер "Сигул" и заняла второе место в соревнованиях роботизированных катеров. Состав команды: Владимир Переверзев, Георгий Коновалов, Игорь Шпак, Владислав Хворост.
Зря в ЮФУ дали катеру такое название, при его упоминании сразу же вспоминается израильский военный безэкипажный катер Seagull, сравнение явно не в пользу отечественного мини-катера.
Роботизированный безэкипажный мини-катер "Глайдерон"

Аппарат "Глайдерон", Научно-промышленная группа МАКО и Самарский Политех
Этот необычный катер привезла во Владивосток команда Научно-промышленной группы "МАКО" (ООО НПК Сетецентрические платформы и ООО "КБ Талисман"), Самара.
Вне программы соревнований был показан многофункциональный подводный ангар "Малахит". В таком могут парковаться автономные подводные роботы, находящиеся в постоянной готовности к запуску.

Многофункциональный подводный ангар "Малахит"

Многофункциональный подводный ангар "Малахит"
Использованные материалы: ; ; . ++









