
Каталог космических роботов
Каталог космических роботов -- Космические роботы
Россия
Андроидная техника (НПО Андроидная техника), Москва
Теледроид, НПО Андроидная техника
2021. В 2020 году началась работа над проектом робота Теледроид с аватарным управлением. Планируется его отправка на орбитальную станцию в 2024 году. Робот, как ожидается, сможет работать как внутри станции, так и на ее внешней стороне.
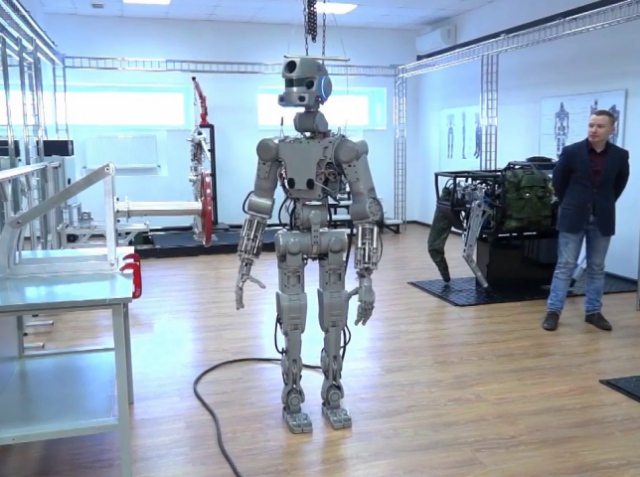
Проект робота-космонавта антропоморфного типа. Для работы на МКС. Планируется готовность к полету в космос в 2021 году.
, НПО "Андроидная техника", Москва
Телеуправляемый андроид для работы в космосе. Дистанционно управляется оператором с помощью костюма-повторителя. Разработан в "начале" десятых годов XXI века. В 2016 году в ЦНИИмаш говорят о планах разработке на его основе робота для МКС со сроком готовности к 2020 году. Разработкой занимается НПО Андроидная техника. /
Центр подготовки космонавтов имени Ю.А.Гагарина, Россия
Андронавт, Центр подготовки космонавтов имени Ю.А.Гагарина, Россия
Телеуправляемый андроид для работы на орбитальных космических станциях.
ЦНИИ РТК, Москва
Космическая транспортно-манипуляционная система для выполнения технологических операций на внешней поверхности космических аппаратов и поддержки экипажа при внекорабельной деятельности. Для работы в КА или на поверхности КА. Сокращение КТМС-1 введено RoboTrends.ru для удобства ссылок на систему.
Энергия (РКК Энергия), НПО "Андроидная техника", ЦНИИ РТК, Россия
Космобот, РКК Энергия, НПО "Андроидная техника", ЦНИИ РТК, Россия
В ноябре 2016 года представители РКК Энергия объявили о планах создания мобильного робота, который сможет эксплуатироваться на российском сегменте МКС в период с 2020 по 2024 год. Соответствующий конкурс выиграли РКК Энергия в кооперации с НПО "Андроидная техника" и ЦНИИ РТК. Ранее, как известно, в "Андроидной технике" создавали робота-аватара SAR-401. Мобильного робота планируется использовать на борту сооружаемого научно-энергетического модуля (НЭМ). О практической полезности такого робота на станции можно спорить, скорее речь идет об испытаниях работы робототехнических устройств в космосе - а это, конечно, нужно делать, учитывая перспективность освоения космического пространства с помощью автономных роботов. Что-то много уже "космических роботов" для работы на МКС в разработке развелось. А реально пока на МКС только американский Robonaut 2 летал.
Сеть российских, полностью роботизованных телескопов МАСТЕР.
Зарубеж
Австралия
Siding Spring Observatory, Австралия
телескоп-робот для автоматизированного сбора информации о космической среде
Германия
AILA, Германия
бортовой робот - андроид с возможностью работы в космосе
2015.07.19 . AILA разработана в Robotics Innovation Center (German Research Center for Artificial Intelligence) и Robotics Group в Университете Бремена, Германия. Сейчас AILA проходит обучение работе на МКС на макете модуля Колумб.
Евросоюз
ERA, Евросоюз
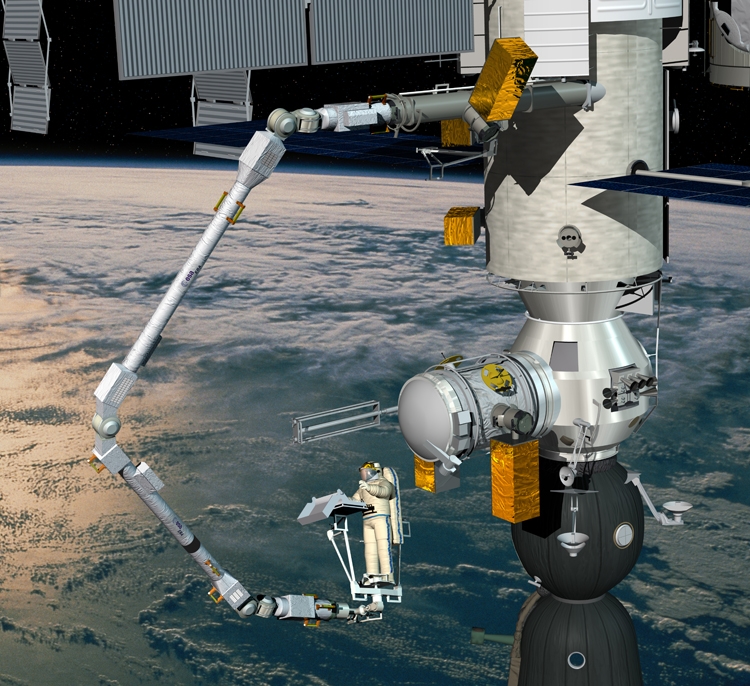
2021.11 Модуль Наука уже на орбите в составе МКС. Российские космонавты отработали на Земле в ЦПК процедуру переноса радиатора с имитатора модуля Рассвет на имитатор модуля Наука с помощью тренажера робота-манипулятора Дон-ERA. Выполнить эту операцию планируется на орбите летом 2022 года.
2018. Робот-манипулятор длиной 11.3 м и массой 600 кг. Должен работать на модуле "Наука", который планируется запустить к МКС. Сроки запуска российского модуля несколько раз переносились и в 2018 году речь идет уже о ноябре 2019 года. / 2018.06.12
Philae, Европа
Робот-зонд, предназначенный для автоматизированных исследований кометы 67Р/Чюрюмова-Герасименко. Вес - около 100 кг. Посадка на комету - 12.11.2014. Доставлен космическим аппаратом Розетта. После 60 часов работы от батареи, робот перешел в спящий режим. Через почти 7 месяцев "сна", 14 июня 2015 года робот подзарядился, поскольку комета приблизилась к Солнцу и готов к проведению дальнейших экспериментов.
Индия
Vyimmitra, Индия
"Веммитра", индийский робот "полуандроидного" типа. Только верхняя часть туловища, без ног. Он, как ожидается, будет на борту индийского космического корабля во-время первого беспилотного полета. Робот будет "женщиной" и станет говорить на двух языках. Представлен в январе 2020 года.
Канада
Canadarm2, Канада
Другое название - Dextre.
Dextre, MDA Space Missions, подразделение компании MacDonald Dettwiler по заказу Канадского космического агентства, Канада
грузовой манипулятор для работы на поверхности МКС. Дистанционно управляется оператором, в том числе может управляться оператором наземного центра управления.
Китай
China Aerospace Science and Technology Corp., Китай
Хiaotian, China Aerospace Science and Technology Corp., Китай
робот для космических исследований на борту орбитальных станций и в открытом космическом пространстве.
2015.11.08 Китайский косморобот Xiaotian сделан по-мотивам марвеловского супергероя?
США
NASA, США
Astrobee, NASA, США

бортовой свободно летающий робот в форме небольшого куба с закругленными гранями для использования на МКС (на рисунке - концепт). В разработке с планами готовности в 2017 году. NASA проводит краудсорсинговый конкурс на проект манипулятора для робота. Робот будет оснащен камерой, микрофоном, RFID-сканером. Задачи на борту: отслеживание качества воздуха, уровня шума, а также выполнение ряда задач с целью снижения нагрузки на космонавтов. Кроме того, робот поможет с тестированием новых технологий и будет выполнять функции робота телеприсутствия для специалистов центра управления полетами в Хьюстоне.
Biobot
2018. Финансируемый NASA в 2018 году проект. В его рамках создают небольшого по размерам робота, задача которого - выступать компаньоном человека-космонавта, транспортировать часть системы жизнеобеспечения космонавта. Такой подход, как ожидается, повысит время автономного пребывания космонавта на поверхности других планет без необходимости возвращаться на базу для пополнения ресурсов. Первоначальная сумма финансирования - $125 тыс.
Clipper, NASA, США
Проект исследования спутника Юпитера - Европы. В 2016 году на него будет потрачено $30 млн. Цель - поиск признаков обитаемости. Планируемое время запуска - 2025 год.
Curiosity, NASA, США
марсоход, действует на Марсе на 2015.05
InSight, США

В мае 2015 года начались испытания спроектированного по заказу NASA марсианского зонда InSight на базе Lockheed Martin около Денвера. . Задачи: изучить сейсмику Марса, температурный режим на глубинах до 5 метров, выявить распределение масс в центре планеты, изучение размеров, плотности и общей структуры Марса, ядра, мантии и коры.
2015.05.29 .
K-REX, NASA, США
Робот для использования на поверхности Луны с элементами ИИ и когнитивными способностями. Должен будет находить удобные маршруты для перемещения по пересеченной поверхности нашего спутника. "Знает" основные законы физики и применяет их для выбора оптимального безопасного маршрута. Пока что не может менять планы в ходе их исполнения - т.е. составляет программу заранее, а затем ей следует.
2016.05.23 Робот удивил людей творческим подходом.
Mars 2020, NASA, США
Ровер, презназначенный для проведения исследований на Марсе, начиная с 2021 года. Ровер будет построен с учетом опыта Curiosity и с использованием ряда его узлов. Новинка получит ряд новых сенсоров и другие задачи. В частности, робот будет собирать пробы грунта, проверять их на предмет следов микробной жизни. У нового ровера изменится конструкция колес, они станут прочнее, чем у Curiosity. Изменится схема посадки ровера на Марс.
Marsbee
Финансируемый NASA в 2018 году проект создания роя летающих роботов-пчел, которые могли бы оказать помощь астронавтам в изучении Марса. Первоначальная сумма финансирования - $125 тыс.
Opportunity, США
MER-B (Mars Exploration Rover - B). Беспилотный ровер - марсоход. Начал работу на поверхности Марса в 2004 году. Остается активным и на 2015 год.
R5, NASA/DARPA, США
Робот для использования в космосе, на Луне, на Марсе. С двумя ногами и возможностью хождения. На 2015.11 в разработке.
Shapeshifter
Финансируемый NASA в 2018 году проект, который подразумевает создание группы роботов, которые могут, объединяясь, принимать различную форму. Это позволит им исследовать поверхность Титана (спутника Сатурна). Первоначальная сумма финансирования - $125 тыс.
Northrop Grumman, Oceaneering Space Systems, США
Archinaut, Made in Space, Northrop Grumman, Oceaneering Space Systems, США
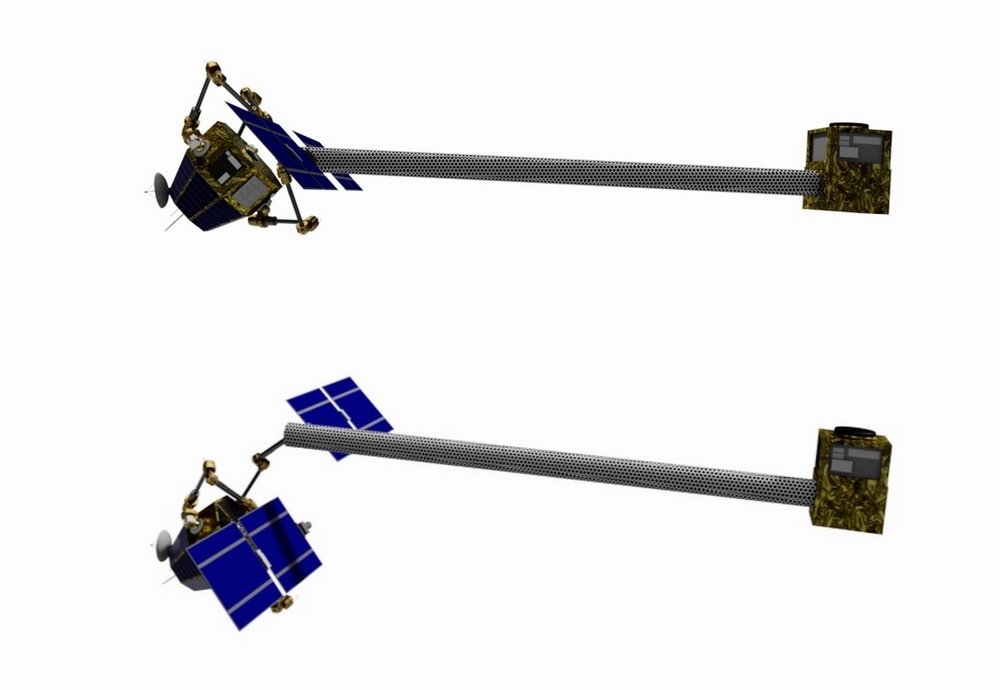
2017.05.15 Archinaut - стройка на орбите. Made In Space демонстрирует видео-рендеринг более крупной системы - технологической платформы Archinaut, которая позволяет осуществлять автономное производство и сборку космических систем на орбите. Archinaut в перспективе сможет производить и собирать большое оборудование, такое как спутники или даже космическую станцию. Проект основан на использовании аддитивных технологий.
2016.03.08 Роботизированный 3D-принтер способен строить космические объекты. А также печатать то, что требуется на борту МКС.
Stone Aerospace, США
DEPTH, Stone Aerospace, США
Deep Phreatic Thermal Explorer. Так называемый "криобот". Разработка по заказу NASA автономного исследовательского робота, способного бурить ледяную поверхности Европы. Обладает встроенным источником энергии и лазерными светодиодами, позволяющими расплавлять лед, чтобы робот мог продвинуться под ледяной панцирь Европы. Аппарат снабжен подводным транспортным средством ARTEMIS (Autonomous Rover / airborne-radar Transects of the Environment Beneath the McMurdo Ice Shelf) - прототипом зонда, способного исследовать термальные источники.
2015.06.15 .
Robonaut 2 или R2, General Motors и NASA при содействии Oceaneering Space Systems, США

фото: NASA
Эволюция проекта Robonaut. Программа Robonaut стартовала в 1997 году. Планировалось, что испытать робота в космосе можно будет еще в 2005 году. В 2014 году был выбран в качестве NASA Government Invention. Официальная страница .
2015.06.21 Robonaut 2 появился на МКС. Робот планируют использовать для "медицинских задач" под управлением докторов, находящихся на Земле. Цель программы - переложить на робота повторяющиеся работы.
2015.06.21 .
Stone Aerospace, США
VALKYRIE, Stone Aerospace, США
Very deep Autonomous Laser-powered Kilowatt-class Yo-yoing Robotic Ice Explorer, разработка компании Stone Aerospace в рамках проекта NASA. Развитие идей исследовательского робота DEPTHX для исследований Европы, спутника Юпитера. В отличие от прототипа, у этого робота источник энергии является внешним и может быть оставлен на поверхности, лазерный луч для бурения льда идет к роботу по сверхтонкому оптоволокну. В 2015 году мощность лазера составляет 5 кВт, к моменту полета на Европу мощность лазера, как ожидается, достигнет 250 кВт. Идея в том, что робот, оказавшись на поверхности Европы, проведет бурение льда. В 2014 году в испытаниях VALKYRIE спустилась на глубину 31 метр в леднике Матануска на Аляске.
2015.06.15 .
X-37B, США

фото: United States Air Force
беспилотный космический челнок (Orbital Test Vehicle-4). Размеры шатлла 2.9 м в высоту и 8.9 м в длину. Аппарат способен перемещаться в космосе благодаря реактивному двигателю.
2017.05.07 Беспилотный орбитальный челнок X-37 вернулся на Землю после полета продолжительностью в 2 года, совершив посадку на территории Космического центра Кеннеди на мысе Канаверал. Пентагон не раскрывает целей полета (упоминалось только о проверке работы ионных микрореактивных двигателей и свойств материалов в космосе).
XS-1, DARPA, США
Подробнее в разделе "Космические челноки"
Япония
GITAI, Япония
2021.11 На МКС прошли испытания универсального робота для космоса GITAI S1, разработанного стартапом GITAI, Япония. Испытания проводились 3 дня, с 13 по 16 октября 2021. Робота на орбиту доставляла NASA. Космонавты смонтировали робота в шлюзовой камере Nonorack Bishop Airlock. Робот успешно справился с решениями двух задач, включенных в программу испытаний, в частности, произвел монтаж, сборку, подключение элементов панели управления шлюзом, подключил кабельные соединения. Также робот взаимодействовал с элементами панели управления. В основном робот справился с заданием самостоятельно, в некоторых случаях ему дистанционно помогли специалисты центра управления модулем из Хьюстона. Робот GITAI S1 это робот андроидного типа (торс с двумя руками-манипуляторами), но на этот раз на орбиту летала только одна его "рука". .
Японское агентство аэрокосмических исследований, Япония
HTV, Японское агентство аэрокосмических исследований, Япония
H-II Transfer Vehicle, японский беспилотный автоматический грузовой космический корабль, созданный в Японском агентстве аэрокосмических исследований. Разработка и постройка обошлась в $680 млн. Длина - около 10 метро, максимальный диаметр - 4.4 м, масса - 10.5 т, грузоподъемность - до 6 т., автономный полет - до 100 часов. Одноразовый, после доставки грузов на МКС, сходит с орбиты и прекращает существование. Не имеет возможностей автостыковки с МКС, стыковку обеспечивает роборука Dextre, Канада, установленная на МКС.
Страна неизвестна

Автономный дрон для использования на обитаемых космических орбитальных станциях.
SpiderFab
Концепт робота для работы в космосе.
2013.09.03
Смотрите связанные статьи Robo-педии:
Смотрите связанные статьи Robo-педии:
Публикации по теме:
 09.12.2020 Ravn X - быстрой доступ к низкой околоземной орбите?
09.12.2020 Ravn X - быстрой доступ к низкой околоземной орбите? 24.09.2018 Первые два робота-попрыгунчика спустились на поверхность астероида Рюгу
24.09.2018 Первые два робота-попрыгунчика спустились на поверхность астероида Рюгу 20.02.2018 Чтобы обрести ногоруки, Robonaut 2 вернётся на Землю с орбиты
20.02.2018 Чтобы обрести ногоруки, Robonaut 2 вернётся на Землю с орбиты 18.06.2017 Робот Valkyrie, разрабатываемый в NASA, осваивает хождение
18.06.2017 Робот Valkyrie, разрабатываемый в NASA, осваивает хождение 15.05.2017 Archinaut - стройка на орбите
15.05.2017 Archinaut - стройка на орбите 31.03.2017 В NASA построили робота-оригами для исследований Марса
31.03.2017 В NASA построили робота-оригами для исследований Марса 28.03.2017 Роботы NASA будут шпионить за космонавтами
28.03.2017 Роботы NASA будут шпионить за космонавтами 08.03.2016 Роботизированный 3D-принтер способен строить космические объекты
08.03.2016 Роботизированный 3D-принтер способен строить космические объекты 27.01.2016 Гавайский робот учится строить посадочную площадку для космических кораблей
27.01.2016 Гавайский робот учится строить посадочную площадку для космических кораблей 03.12.2015 Робот-космонавт станцевал для NASA
03.12.2015 Робот-космонавт станцевал для NASA 08.11.2015 Китайский косморобот Xiaotian сделан по-мотивам марвеловского супергероя?
08.11.2015 Китайский косморобот Xiaotian сделан по-мотивам марвеловского супергероя?









