
Бортовые роботы космических аппаратов
Бортовые роботы космических аппаратов -- Космические роботы
Россия
Андроидная техника (НПО Андроиздная техника), Москва
ARTEM (Automatic Research and Testing Machine, АРТЕМ), Андроидная техника (НПО Андроиздная техника), Москва
2020.01.15 В НПО "Андроидная техника" продолжат разработку "роботов-пилотов" для космических кораблей. В частности, по проекту "Испытатель" будет разработан "робот-пилот" для российского космического корабля Орел. Название новинки - Артем (Automatic Research and Testing Machine). Как и предыдущая модель Skybot F-850, более известная как Федор (FEDOR), робот ARTEM будет выполнен в гуманоидном форм-факторе, но только станет меньше и легче, для чего в конструкции планируют использовать больше пластика и меньше металла. Разработчики откажутся от пятипалых рук, робот получит новые захваты. Заявляется о планах "интеграции" робота с системами электропитания и связи корабля.
А вот с управлением кораблем робота отчего-то интегрировать не планируют. Роботу придется "нажимать на кнопки" своими новыми захватами. Хочется спросить - зачем так сложно?
Основным режимом работы робота будет автономный. Также сохранится возможность работы в режиме аватара - с копированием действий человека, находящегося на удалении.
Будет также реализован режим "супервайзинга", когда человек сможет вмешаться в работу робота, действующего по программе. Первый запуск корабля Орел без космонавтов запланирован на 2023 год с космодрома Восточный, стыковка с МКС не планируется. Источники: ; .
FEDOR (Skybot F-850)
Антропоморфный гуманоидный робот для использования в ближнем космосе на борту космических кораблей или спутников. С элементами автономности. В 2019 году перестал использоваться после полета в космос.
SAR-401, Андроидная техника (НПО "Андроидная техника"), Москва
Телеуправляемый андроид для работы на борту КА или в космосе. Дистанционно управляется оператором с помощью костюма-повторителя.
Центр подготовки космонавтов имени Ю.А.Гагарина, Россия
Андронавт, Центр подготовки космонавтов имени Ю.А.Гагарина, Россия
Телеуправляемый андроид для работы на орбитальных космических станциях.
ЦНИИ РТК, Москва
КТМС-1, ЦНИИ РТК, Москва
Космическая транспортно-манипуляционная система для выполнения технологических операций на внешней поверхности космических аппаратов и поддержки экипажа при внекорабельной деятельности. Для работы в КА или на поверхности КА. Сокращение КТМС-1 введено RoboTrends.ru для удобства ссылок на систему.
Зарубеж
AILA, Robotics Innovation Center, Германия
бортовой робот антропоморфного типа с возможностью работы в космосе
2015.07.19 . AILA разработана в Robotics Innovation Center (German Research Center for Artificial Intelligence) и Robotics Group в Университете Бремена, Германия. Сейчас AILA проходит обучение работе на МКС на макете модуля Колумб.
Archinaut, Made in Space, Northrop Grumman, Oceaneering Space Systems, США
2017.05.15 Archinaut - стройка на орбите. Made In Space демонстрирует видео-рендеринг более крупной системы - технологической платформы Archinaut, которая позволяет осуществлять автономное производство и сборку космических систем на орбите. Archinaut в перспективе сможет производить и собирать большое оборудование, такое как спутники или даже космическую станцию. Проект основан на использовании аддитивных технологий.
2016.03.08 Роботизированный 3D-принтер способен строить космические объекты. А также печатать то, что требуется на борту МКС.
Astrobee, NASA, США
бортовой свободно летающий робот в форме небольшого куба с закругленными гранями для использования на МКС. В разработке с планами готовности в 2017 году. NASA проводит краудсорсинговый конкурс на проект манипулятора для робота. Робот будет оснащен камерой, микрофоном, RFID-сканером. Задачи на борту: отслеживание качества воздуха, уровня шума, а также выполнение ряда задач с целью снижения нагрузки на космонавтов. Кроме того, робот поможет с тестированием новых технологий и будет выполнять функции робота телеприсутствия для специалистов центра управления полетами в Хьюстоне.
CIMON, Airbus / IBM
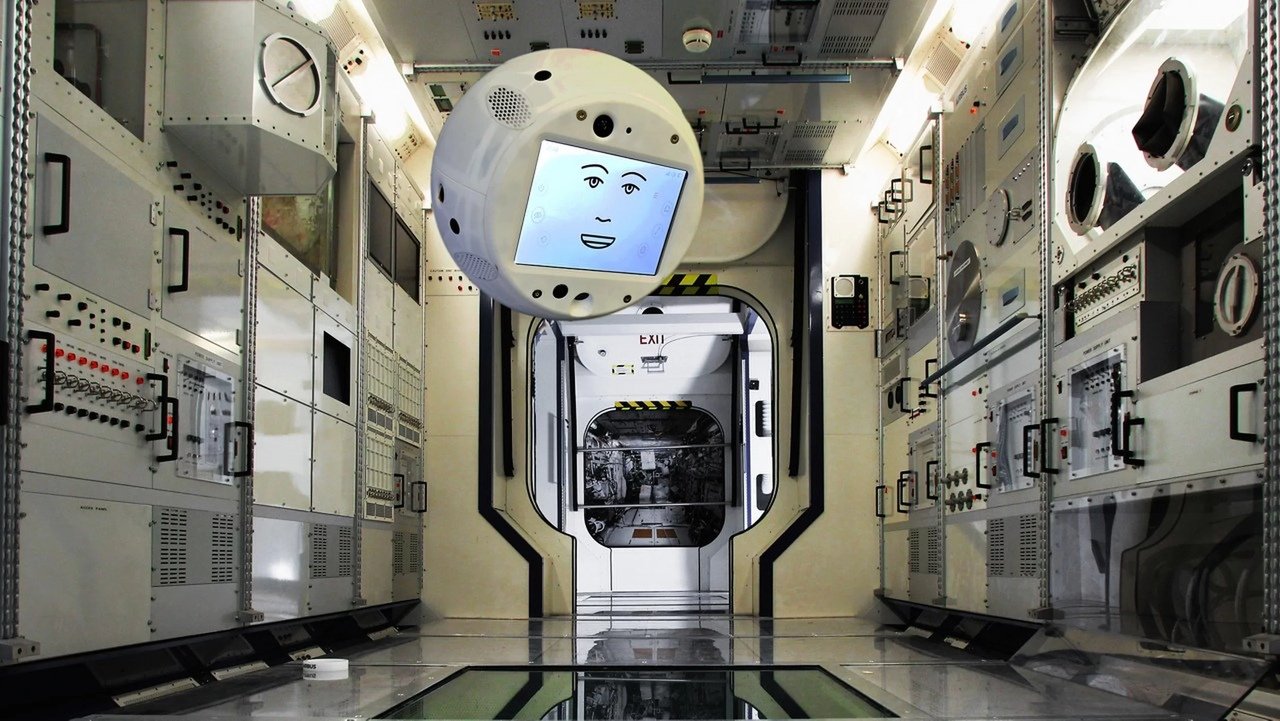
Бортовой свободно летающий робот в форме бочонка. Предполагается работа робота на МКС в период с июня 2018 года по октябрь 2018 года. Встроенный ИИ позволяет роботу отзываться на речевые запросы одного из членов экипажа, выдавая различную справочную информацию. Робот распознает членов экипажа "в лицо".
, MDA Space Missions, подразделение компании MacDonald Dettwiler по заказу Канадского космического агентства, Канада
грузовой манипулятор для работы на поверхности МКС. Дистанционно управляется оператором, в том числе может управляться оператором наземного центра управления. Служит для разгрузки грузовых аппаратов, стыкующихся с МКС.
Kirobo, Toyota Motors, Япония
миниатюрный робот-собеседник. Рост около 35 см. Предназначен для общения с людьми на борту МКС.
R5 Valkyrie, NASA/DARPA, США
Антропоморфный двуногий ходящий робот, 1.8 м, 131.5 кг. Два манипулятора в виде рук. Предназначен для использования на борту космического аппарата. Телеуправляемый.
2015.12.03 Робот-космонавт станцевал для NASA.
Robonaut 2 или R2, General Motors и NASA при содействии Oceaneering Space Systems, США
Эволюция проекта Robonaut. Программа Robonaut стартовала в 1997 году. Планировалось, что испытать робота в космосе можно будет еще в 2005 году. В 2014 году был выбран в качестве NASA Government Invention. Официальная страница .
2015.06.21 Robonaut 2 появился на МКС. Робот планируют использовать для "медицинских задач" под управлением докторов, находящихся на Земле. Цель программы - переложить на робота повторяющиеся работы.
2015.06.21 .
SPHERES

Автономный дрон для использования на обитаемых космических орбитальных станциях.
SpiderFab
Концепт робота для работы в космосе.
2013.09.03
Хiaotian, China Aerospace Science and Technology Corp., Китай
робот для космических исследований на борту орбитальных станций и в открытом космическом пространстве.
2015.11.08 Китайский косморобот Xiaotian сделан по-мотивам марвеловского супергероя?
Неизвестный производитель, Европа
Европейский робот-манипулятор длиной 11,3 м, масса 600 кг, максимальная грузоподъемность 8 тонн. Планируется к установке на модуле Наука. Задача - перемещать отдельные крупные модули МКС, захватывать и перемещать отдельные объекты с точностью до 5 мм.
Смотрите связанные статьи Robo-педии:
Публикации по теме:
 26.11.2018 На борту МКС испытали очередного робота для космоса
26.11.2018 На борту МКС испытали очередного робота для космоса 19.06.2018 Очередной робот-ассистент слетает на МКС
19.06.2018 Очередной робот-ассистент слетает на МКС 20.02.2018 Чтобы обрести ногоруки, Robonaut 2 вернётся на Землю с орбиты
20.02.2018 Чтобы обрести ногоруки, Robonaut 2 вернётся на Землю с орбиты 15.05.2017 Archinaut - стройка на орбите
15.05.2017 Archinaut - стройка на орбите 28.03.2017 Роботы NASA будут шпионить за космонавтами
28.03.2017 Роботы NASA будут шпионить за космонавтами 08.03.2016 Роботизированный 3D-принтер способен строить космические объекты
08.03.2016 Роботизированный 3D-принтер способен строить космические объекты 03.12.2015 Робот-космонавт станцевал для NASA
03.12.2015 Робот-космонавт станцевал для NASA 08.11.2015 Китайский косморобот Xiaotian сделан по-мотивам марвеловского супергероя?
08.11.2015 Китайский косморобот Xiaotian сделан по-мотивам марвеловского супергероя? 26.10.2015 ЦНИИ РТК представил действующий макет транспортной манипуляционной системы для поддержки работы космонавтов
26.10.2015 ЦНИИ РТК представил действующий макет транспортной манипуляционной системы для поддержки работы космонавтов









